- Schleifringläufermotor
-
Der Schleifringläufermotor (englisch: slip ring motor)[1] ist ein Elektromotor der Bauart Drehstrom-Asynchronmaschine. Er unterscheidet sich von jenen meist mit Kurzschlussläufer ausgeführten Motoren dadurch, dass die Läuferwicklung nicht kurzgeschlossen, sondern über Schleifringe nach außen geführt ist.
Schleifringläufermotoren werden seit vielen Jahrzehnten überall dort als Antriebsmaschinen angewendet, wo hohe Anlaufmomente bei gleichzeitig niedrigem Anlaufstrom gefordert werden.[2] Auch heute noch werden sie in vielen Industriebranchen eingesetzt, werden aber zunehmend durch mit Frequenzumrichtern betriebene konventionelle Asynchronmotoren abgelöst.
Inhaltsverzeichnis
Grundlagen
Der Schleifringläufermotor stellt einen Drehstromtransformator mit drehbar gelagerter Sekundärwicklung dar. Entweder wird die Sekundärwicklung durch Beschaltung mit Widerständen zu einer von außen beeinflussbaren Kurzschlusswicklung, oder die Läuferwicklung wird mit einer Hilfsspannung veränderlicher Frequenz beaufschlagt. Ersteres gestattet das Hochfahren und Drehzahlstellen mit einfachen Mitteln durch Anlasswiderstände, letzteres eine effizientere, jedoch aufwendigere Drehzahlstellung.[3]
Aufbau
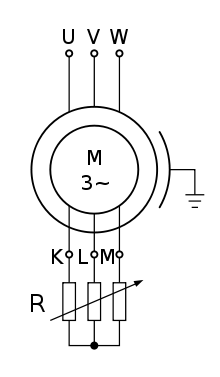 Anschluss der Widerstände für den Anlauf, bei Nenndrehzahl auf Kurzschluss
Anschluss der Widerstände für den Anlauf, bei Nenndrehzahl auf Kurzschluss
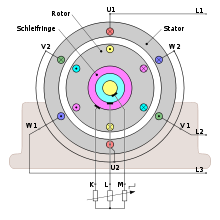 Schematischer Aufbau mit Schleifringen und Wicklung
Schematischer Aufbau mit Schleifringen und Wicklung Schleifring eines Elektromotors
Schleifring eines ElektromotorsDer Stator des Schleifringläufermotors ist genauso aufgebaut wie der Stator des Kurzschlussläufermotors. Auf der Läuferwelle befinden sich das Blechpaket und die Schleifringe. Je nach Baugröße des Motors wird entweder eine Rippenwelle oder eine zylindrische Welle verwendet. Auf die Welle wird das Blechpaket, in welchem sich rillenförmige Nuten befinden, aufgeschrumpft. Die Läuferwicklung wird in die Nuten des Läuferblechpaketes eingefügt.[4] Die zu den Schleifringen führenden Spulenenden sind wie auch bei Kollektormotoren mit einer Bandage gegen Zentrifugalkräfte gesichert.
Die Läuferwicklung hat einen kleineren Leiterquerschnitt als beim Käfigläufer und dementsprechend viele Windungen, so dass die gesamte Kupferfläche bei beiden Typen etwa gleich ist. Aus diesem Grund ist die induzierte Spannung und der Wirkwiderstand wesentlich größer als dies beim Käfigläufer der Fall ist. Der Strom ist geringer, wodurch die Übertragung über Schleifringe und Kohlebürsten ermöglicht wird. Am Einphasennetz dürfen die Zähne von Läufer und Stator im Stillstand nicht genau übereinander stehen, da der Motor ansonsten nicht anlaufen kann. Aus diesem Grund müssen Läufer und Stator unterschiedliche Nutenzahlen haben.[5]
Um einen einfacheren Zugang zu den Kohlebürsten zu ermöglichen, sind die Schleifringe oft in einem vom Motorgehäuse getrennten Gehäuse untergebracht. Dies ermöglicht eine einfache Wartung der Schleifringe und der Kohlebürsten. Außerdem wird der Bürstenabrieb (Ruß) vom eigentlichen Motor ferngehalten. Die Wartung des Schleifringapparates umfasst im Wesentlichen den Austausch heruntergefahrener Bürsten und die Reinigung.
Die Läuferwicklung ist in der Regel eine Dreiphasenwicklung. Die Wicklungen sind meistens in Stern, seltener in Dreieck geschaltet. Der Sternpunkt der Wicklungen wird im Innern des Läufers verschaltet. Bei einigen Motoren wird der Sternpunkt über einen vierten Schleifring nach außen geführt. Dieser Sternpunktanschluss wird mit Q bezeichnet. Die Wicklungsenden sind an Schleifringen angeschlossen, an welchen als Stromabnehmer Kohlebürsten anliegen. Die dreisträngige Läuferwicklung hat die Anschlussbezeichnungen K, L, M.[4]
Neben der dreiphasigen Läuferwicklung gibt es auch Schleifringläufer mit zweiphasiger Läuferwicklung. Diese Bauart wird gewählt, um Kosten beim Anlasser zu sparen. Anstatt drei Anlasswiderstände, benötigt man hierbei nur zwei Anlasswiderstände. Diese Wicklungsart wird insbesondere bei Maschinen mit großer Leistung gerne angewendet. Die Stränge der zweiphasigen Wicklung sind in V-Schaltung geschaltet. Die zweiphasige Läuferwicklung hat die Anschlüsse K, L. Auch hier erfolgt die Verschaltung innerhalb der Wicklung. Manchmal wird auch der Mittelpunkt der Läuferwicklungen über einen Schleifring nach außen geführt. Dieser Anschluss wird mit Q bezeichnet. In jedem Fall wird der Schleifringläufer mit mindestens drei Schleifringen angefertigt.
Auf die Funktionsweise der Maschine hat es keinen Einfluss, ob die Rotorwicklung dreiphasig oder zweiphasig ausgeführt ist. Allerdings müssen der Rotor und der Stator die gleiche Polzahl haben; haben Rotor und Stator unterschiedliche Polzahlen, wird kein Drehmoment erzeugt.
Über die Schleifringe kann der Schleifringläufermotor mittels Leistungswiderständen angelassen werden.[3] Die Anlassschaltung ist vom speisenden Netz potentialgetrennt. Unter anderem bei Karussell-Antrieben waren auch Stellwiderstände üblich, die aus unterschiedlich weit in ein Elektrolyt eintauchenden Elektroden bestanden. Die sich erhitzende Flüssigkeit war zugleich eine einfache und sichere Methode der Wärmeabfuhr, die Veränderung der Eintauchtiefe der Elektroden erfolgte beispielsweise über ein Pedal[6].
Man unterscheidet zwei Arten von Schleifringen:
- Schleifringe mit Permanentkontaktbürsten
- Schleifringe mit Bürstenabhebevorrichtung
Schleifringe mit Permanent-Kohlebürsten
Die Schleifringe bestehen meist aus einer Kupfer/Zinn/Nickel-Legierung und werden bei radialer Anordnung in der Regel mit einer Spiralnut versehen. Solche dauernd mit Kohlebürsten kontaktierte Schleifringe werden bei kleineren Motoren verwendet. Die Kohlebürsten werden durch den Bürstenhalter in der jeweiligen Position gehalten.
Schleifringe mit Bürstenabhebevorrichtung
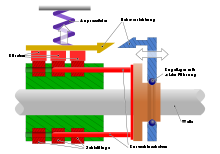 Funktionsprinzip einer Bürstenabhebevorrichtung mit Kurzschluss des Rotors
Funktionsprinzip einer Bürstenabhebevorrichtung mit Kurzschluss des RotorsSchleifringe mit Bürstenabhebevorrichtung sind nur während der Anlaufphase aktiv. Sie haben eine rillenlose und glatte Oberfläche und werden aus Edelstahl gefertigt. Sie finden sich überwiegend bei Motoren mit einer Leistung ab 20 kW.[7] Aufgrund ihrer komplizierten Mechanik verlieren sie zunehmend an Bedeutung.
Über die Schleifringe sind die Ankerwicklungen von außen zugänglich und können über Widerstände definiert kurzgeschlossen werden. Nachdem der Motor seine Nenndrehzahl erreicht hat (hochgelaufen ist), werden zunächst über die Schleifringkurzschließvorrichtung die Rotorwicklungen kurzgeschlossen, anschließend die Kohlebürsten von der Bürstenabhebevorrichtung von den Schleifringen abgehoben. Im Läuferkreis treten keine Zusatzverluste mehr auf und der Verschleiß von Kohlebürsten und Schleifringen bleibt auf das Hochlaufen beschränkt.[8] Durch das Abheben der Kohlebürsten werden die Übergangswiderstände zwischen den Schleifringen und den Kohlebürsten vermieden. Außerdem entfällt die Reibung zwischen Kohlebürsten und Schleifringen, dies führt zu einer leichten Erhöhung des Wirkungsgrades.[9]
Wirkungsweise
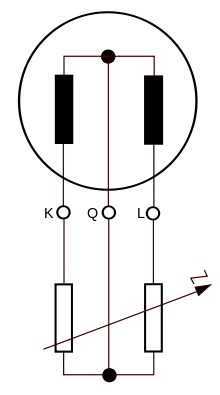 Zweiphasige Läuferschaltung des Schleifringläufermotors
Zweiphasige Läuferschaltung des Schleifringläufermotors Beispiel: Leistungsschild
Beispiel: Leistungsschild
eines SchleifringläufermotorsSchleifringläufermotoren sind Induktionsmotoren und wirken wie Kurzschlussläufermotoren. Im Stillstand wirken Läufer und Ständer wie ein Transformator. Das Ständerdrehfeld bewirkt in den Wicklungen des Läufers eine Flussänderung. Dadurch wird in der Läuferwicklung eine Spannung induziert, sie wird Läuferstillstandsspannung genannt. Die Läuferstillstandsspannung ist auf dem Motortypenschild angegeben.[10] Die Höhe der Läuferstillstandsspannung ist von der Netzspannung für die der Motor bemessen ist unabhängig.[9]
Die Läuferstillstandsspannung kann man an den offenen Schleifringen messen. Dabei kann man auch feststellen, ob der Läufer dreiphasig oder zweiphasig gewickelt ist:
Die Spannungen der dreiphasigen Wicklung sind zwischen allen drei Schleifringen gleich groß. Bei der zweiphasigen Wicklung sind die Spannungen zwischen den Klemmen K und Q sowie den Klemmen L und Q gleich groß. Zwischen den Klemmen K und L ist die Spannung √2-mal so groß wie zwischen den anderen Klemmen.
Werden die Läuferanschlüsse kurzgeschlossen, ruft die im Läufer induzierte elektrische Spannung in der Läuferwicklung einen Stromfluss hervor. Dieser in den Läuferwicklungen fließende Strom besteht aus drei gegeneinander phasenverschobenen Wechselströmen. Der induzierte Drehstrom erzeugt das Läuferdrehfeld. Das Läuferdrehfeld bewirkt zusammen mit dem Ständerdrehfeld ein Drehmoment. Das Läuferdrehfeld behält unabhängig zur Läuferdrehzahl immer die gleiche Lage zum Ständerdrehfeld. Deshalb kann der Schleifringläufermotor nicht außer Tritt fallen.[10]
Betriebsverhalten
Bei kurzgeschlossenen Läuferanschlüssen entspricht das Betriebsverhalten des Schleifringläufermotors dem eines Kurzschlussläufermotors. Die Drehmoment/Drehzahl Kennlinie ist genauso wie die des Kurzschlussläufermotors. Der Anlaufstrom ist etwa 6-mal so groß wie der Nennstrom. Das Anlaufdrehmoment ist etwa 1,5-mal so groß wie das Nenndrehmoment.[11]
Bei kurzgeschlossenen Schleifringen wirkt im Läuferstromkreis hauptsächlich der Blindwiderstand von der Läuferwicklung. Dieser Blindwiderstand ruft eine Phasenverschiebung zwischen induzierter Läuferspannung und dem Läuferstrom hervor. Durch diese Phasenverschiebung verschiebt sich das Läuferdrehfeld. Diese Verschiebung des Läuferdrehfeldes bewirkt, dass die Pole des Läuferdrehfeldes gerade unter den Polen des Ständerdrehfeldes liegen. Dadurch wird dann nur eine Kraft in Richtung auf die Welle ausgeübt. Da aber gleichzeitig auch der Wirkwiderstand der Wicklung vorhanden ist, ist die Phasenverschiebung zwischen Läuferspannung und Läuferstrom ein wenig kleiner als 90°, dadurch entsteht ein kleines Drehmoment.
Wenn der Läufer in Drehfeldrichtung dreht, sinkt die Frequenz f des Läuferstromes. Durch das Absinken der Läuferfrequenz sinkt der Blindwiderstand XL der Läuferwicklung mit der Induktivität L ab.
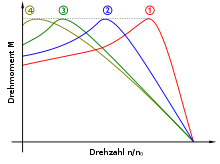 Drehmoment in Abhängigkeit von den Leistungswiderständen, R4 > R3 > R2 > R1
Drehmoment in Abhängigkeit von den Leistungswiderständen, R4 > R3 > R2 > R1Bleibt der ohmsche Widerstand dabei konstant, wird die Phasenverschiebung zwischen Spannung und Strom kleiner und die ungünstige Lage der Läuferpole zu den Ständerpolen wird verbessert. Je kleiner die Phasenverschiebung zwischen Läuferspannung und Läuferstrom ist, umso größer ist das Drehmoment.
Mit zunehmender Drehzahl sinkt die im Läufer induzierte Spannung, damit sinken der Läuferstrom und das auch Drehmoment. Das Drehmoment sinkt wenn die Verkleinerung der induzierten Spannung überwiegt. Das Drehmoment steigt, wenn die Verkleinerung der Phasenverschiebung überwiegt.[10]
Werden in den Läuferstromkreis Widerstände geschaltet, wird die Phasenverschiebung zwischen der Läuferspannung und dem Läuferstrom verkleinert. Dadurch wird der Anlaufstrom erheblich herabgesetzt. Ein weiterer nützlicher Effekt ist, dass durch Einschalten von Widerständen in den Läuferkreis das Anlaufmoment des Motors größer wird als bei kurzgeschlossenem Läuferkreis.[8] Außerdem verschiebt sich der Kipppunkt hin zu kleineren Drehzahlen. Dabei ist die Verschiebung umso größer, je größer der Widerstand ist. Der Schleifringläufermotor zeigt mit Anlasswiderständen bessere Anlaufeigenschaften als der Käfigläufermotor mit Stromverdrängungsläufer.[12]
Bei Schleifringläufermotoren beträgt der bei Nenndrehzahl auftretende Nennschlupf 3 bis 8 %. Durch eine Erhöhung des Schlupfes wird die induzierte Läuferspannung erhöht und dadurch vergrößert sich der Läuferstrom.[8] Gleichzeitig steigt bei größerem Schlupf die Läuferfrequenz und der Motor gibt ein größeres Drehmoment ab. Mit größer werdendem Schlupf verschlechtert sich allerdings der Wirkungsgrad des Motors.[10]
Durch das Zwischenschalten von Widerständen in den Läuferkreis erhöht sich der Schlupf. Dieses liegt daran, dass durch die höhere Induktionswirkung des Drehfeldes auf den Läufer auch noch zusätzlich der Leistungsbedarf der zwischengeschalteten Widerstände erbracht werden muss. Sind diese Widerstände stufenlos verstellbar, ist durch die Schlupfänderung eine in weiten Grenzen stufenlose Drehzahlsteuerung erreichbar. Die Drehzahlsteuerung mittels Widerständen im Läuferkreis setzt allerdings eine Motorbelastung mit konstantem Drehmoment voraus. Da die Drehzahlherabsetzung mittels Widerständen im Dauerbetrieb zu hohen Stromwärmeverlusten führt, ist sie bei großen Motorleistungen unwirtschaftlich. Die durch den Schlupf im Läufer entstehende Verlustleistung wird Läuferverlustleistung oder auch Schlupfleistung genannt. Durch eine Kaskadenschaltung lässt sich diese Schlupfleistung rückgewinnen. Hierfür wird ein zweiter Schleifringläufermotor mechanisch mit dem ersten Motor gekoppelt und über die Läuferwicklung gespeist. Eine weitere Möglichkeit ist die Kopplung über einen Umrichter.[11]
Vor- und Nachteile
Vorteile
- Hohes Anlaufdrehmoment
- Niedriger Anlaufstrom
- Drehzahlsteuerung mit einfachen Mitteln
- Einflussnahme auf den Läuferkreis möglich
- Sanftes Anlaufen bei großer Last möglich
Nachteile
- Wartungsintensiv
- Lange Anlaufphase
- Schlecht für Kurzzeitbetrieb geeignet
- Kleinerer Wirkungsgrad als Käfigläufermotoren, insbesondere bei kleinen Drehzahlen
Einsatzbereiche
Schleifringläufermotoren werden überall dort eingesetzt, wo ihre Vorteile (hohes Anlaufdrehmoment bei gleichzeitig niedrigem Anlaufstrom) überwiegen. Das ist insbesondere im Hochleistungsbereich der Fall. Besonders in schwachen Stromnetzen sind Schleifringläufer in bestimmten Fällen eine kostengünstige Antriebslösung gegenüber Kurzschlussläufermotoren mit Frequenzumrichtern. Dies gilt insbesondere dann, wenn die Arbeitsmaschinen dem Motor große Trägheitsmomente oder Gegenmomente entgegensetzen. In schwachen Netzen können sich große Umrichter nachteilig auf die Sinusform der Netzspannung auswirken, auch hier bietet der Schleifringläufermotor eine Alternative.
Die Vorteile des Schleifringläufermotors überwiegen bei Leistungen ab 630 Kilowatt und Betriebsspannungen ab 6000 Volt. Bei allen anderen Anwendungen konnte sich die Kombination aus Kurzschlussläufermotor und Frequenzumrichter durchsetzen.
Einsatzbeispiele
- Antrieb großer Werkzeugmaschinen
- Antrieb von Steinbrechmaschinen
- Antrieb von Mühlen
- große Wasserpumpen und Lüfter
- Hebezeuge
- große Krananlagen
- Antriebe mit Volllast- oder Schwerlauf[8]
In landwirtschaftlichen Betriebsstätten dürfen Schleifringläufermotoren wegen der erhöhten Brandgefahr nicht eingesetzt werden.
Lange Zeit war der Schleifringläufer der dominierende Antriebsmotor für drehzahlgesteuerte Antriebe. In Krananlagen war er viele Jahre der meist eingesetzte Antriebsmotor. Aufgrund der immer kostengünstigeren und besser werdenden Umrichter wurde der Schleifringläufermotor aus seiner dominierenden Position in Spezialbereiche gedrängt, wo seine guten Anlaufeigenschaften von Nutzen sind. Die mit einfachen technischen Mitteln erreichbaren guten Anlaufeigenschaften sind der Grund, dass der Schleifringläufermotor auch heute noch in Spezialbereichen eingesetzt wird.[13][14]
Gesetzliche Bestimmungen und sonstige Regelwerke
- EN 60 034 Teil 1 Allgemeine Bestimmungen für umlaufende elektrische Maschinen
- EN 60 034 Teil 8 Anschlussbezeichnungen und Drehsinn für elektrische Maschinen
- DIN IEC 34 Teil 7 Bauformen umlaufende elektrische Maschinen
- EN 60034-12 Anlaufverhalten eintourige elektrische Maschinen auf Spannung > 660 Volt
- EN 60034-5 Schutzarten umlaufender elektrischer Maschinen
- EN 60034-6 Kühlarten, drehende elektrische Maschinen
Literatur
- Hans Günter Boy, Horst Flachmann, Otto Mai: Die Meisterprüfung Elektrische Maschinen und Steuerungstechnik. 4. Auflage. Vogel Buchverlag, Würzburg 1983, ISBN 3-8023-0725-9
- Günter Springer: Fachkunde Elektrotechnik. 18. Auflage. Verlag Europa-Lehrmittel, Wuppertal 1989, ISBN 3-8085-3018-9
- Detlev Roseburg: Elektrische Maschinen und Antriebe. Fachbuchverlag Leipzig im Carl Hanser Verlag, 1999, ISBN 3-446-21004-0
Einzelnachweise
- ↑ Englisch Grundkurs Technik. Max Hueber Verlag, München 1979, ISBN 3-19-08-2181-X
- ↑ Drehstrommotoren mit Schleifringläufer Antriebe für Krane, Brecher und weitere Anwendungen
- ↑ a b Franz Moeller, Paul Vaske (Hrsg): Elektrische Maschinen und Umformer. Teil 1 Aufbau, Wirkungsweise und Betriebsverhalten, 11. überarbeitete Auflage, B. G. Teubner, Stuttgart 1970
- ↑ a b Ernst Hörnemann, Heinrich Hübscher: Elektrotechnik Fachbildung Industrieelektronik. 1 Auflage. Westermann Schulbuchverlag GmbH, Braunschweig, 1998, ISBN 3-14-221730-4
- ↑ Paul Vaske, Johann Heinrich Riggert: Elektrische Maschinen und Umformer. Teil 2 Berechnung elektrischer Maschinen, 8. überarbeitete Auflage, B. G. Teubner, Stuttgart 1974, ISBN 3-519-16402-7
- ↑ Historisches Kettenkarussell auf der BRN/Dresden 2007
- ↑ Mechanischer Aufbau der Schleifringläufermotoren ABB
- ↑ a b c d Elektrotechnik Prüfungsbuch. Verlag Europa-Lehrmittel, 1970
- ↑ a b Wilhelm Biscan: Die Starkstromtechnik. Verlag für Architektur, Technik und Gewerbe Carl Scholtze, Leipzig 1907
- ↑ a b c d A. Senner: Fachkunde Elektrotechnik. 4.Auflage. Verlag Europa-Lehrmittel, 1965
- ↑ a b Hanskarl Eckardt: Grundzüge der elektrischen Maschinen. B. G. Teubner, Stuttgart 1982, ISBN 3-519-06113-9
- ↑ Dieter Brockers: Lexikon Widerstände. Gino Else GmbH Elektrotechnische Fabrik, 1998
- ↑ U. Winter: Sicherer Betrieb von Schleifringläufermotoren – Statische und dynamische Vorgänge an Asynchronmotoren mit Schleifringläufer und Anlassern. VEM Sachsenwerk GmbH, Dresden
- ↑ Einsatz von Schleifringläufermotoren VEM Sachsenwerk GmbH, Dresden
Siehe auch








Wikimedia Foundation.