- Märklin Digital
-
Märklin Digital ist der Name eines Systems zur digitalen Modellbahnsteuerung, das das Modellbahnunternehmen Märklin 1984 auf den Markt brachte. Es war das erste allgemein verfügbare digitale Modellbahnsystem.
Inhaltsverzeichnis
Prinzipielle Funktion
Klassische Modellbahnsteuerungen verwenden zwei Leiter im Modellbahngleis, zwischen denen eine Spannung angelegt wird. Die Leiter sind direkt mit dem Motor in der Modelllokomotive verbunden, der sich mit einer zur Spannung proportionalen Geschwindigkeit dreht und die Lokomotive bewegt.
Eine digitale Modellbahn benutzt die zwei Leiter im Modellbahngleis hingegen als kombinierten Energie-Daten-Bus, der eine gleichbleibende Spannung als Energieversorgung zur Verfügung stellt, in die zusätzlich Steuerungsbefehle eingeflochten werden. Diese Befehle werden von einfachen und sehr kleinen Mikrocontrollern, den sogenannten Decodern, ausgewertet, die in den Lokomotiven sitzen. Zusätzliche fest installierte Decoder ermöglichen zudem die Ansteuerung von ortsfesten Geräten wie Weichen und Signalen.
Märklin Digital verwendet zur Ansteuerung des Busses integrierte Schaltkreise von Motorola, weswegen man auch vom Motorola-Format oder vom Märklin-Motorola-Digitalsystem spricht. Dies ist ein grundsätzliches Unterscheidungsmerkmal zu alternativen digitalen Modellbahnsteuerungen, bei denen sich das Digital-Command-Control-Datenformat auf breiter Front durchgesetzt hat. Im klassischen Märklin-Digitalsystem ist der Datenbus unidirektional, d. h. die Lokomotiven und anderen Geräte können nur Befehle von der Zentrale entgegennehmen, selbst aber keine Informationen senden. Für diesen Weg nutzt das System einen zweiten, völlig unabhängigen Rückmeldebus.
Zur Energieversorgung wird in den Märklin-Digital-Bus eine Rechteckspannung eingespeist, die zwischen +22 V und -22 V oszilliert. Dies ist am klassischen Märklinsystem orientiert, das mit einer Wechselspannung von bis zu 16 V im Gleis zur Ansteuerung des Motors arbeitet. Aus diesem Grund können theoretisch auch nicht mit einem Digitaldecoder ausgerüstete Lokomotiven auf einer Märklin-Digital-Modellbahnanlage eingesetzt werden - sie bewegen sich allerdings immer mit voller Geschwindigkeit in die gleiche Richtung.
Die digitalen Informationen werden auf dem Bus dadurch übertragen, dass die Zeitspanne für positive und negative Spannung zwischen den Leitern nicht exakt gleich lang sind. Je nachdem, ob der Übergang zwischen positiver und negativer Spannung zeitlich etwas früher oder später als für eine gleichmäßige Frequenz nötig erfolgt, wird eine digitale 0 oder 1 übertragen. Über die Protokollschichten des Motorola-Formates entsteht so ein digital übermittelter Befehl.
Systemkomponenten
Zentrale Steuerung
 Central Unit, Control 80 und Interface
Central Unit, Control 80 und Interface
Herzstück des Märklin-Digitalsystem ist die Central Unit, die den Datenbus antreibt und Befehle versendet. In ihrer ursprünglichen Bauform hat sie keinerlei Bedienelemente und musste mindestens um eine Control Unit und einen Transformator ergänzt werden. Die Control Unit dient dabei zur Eingabe der Steuerbefehle für die Lokomotiven. Im Laufe der Zeit kamen verschiedene Kombinationen aus diesen drei Komponenten auf den Markt.
An der Control Unit wird die zu steuernde Lokomotive über eine Zehner-Zifferntastatur ausgewählt; dann kann mit einem Drehrad die Geschwindigkeit geändert oder über zusätzliche Funktionstasten eine Spezialfunktion ein- und ausgeschaltet werden – wie etwa Licht, ein Geräuschmodul oder ein Dampferzeuger. Frühe Versionen des Märklin-Digitalsystems erlaubten nur eine solche Sonderfunktion. Später wurden bis zu vier Funktionen ergänzt. Grundsätzlich ist es immer möglich, mehrere Control Units zu verwenden, um mehrere Lokomotiven gleichzeitig zu steuern.
Weiterhin können an die Central Unit sogenannte Keyboard-Einheiten angeschlossen werden, von denen jede bis zu 16 ortsfeste Befehlsempfänger wie Weichen und Signale schalten kann. Anders als bei den Control Units ist hierbei jedem Tastenpaar ein Empfänger fest zugeordnet. Um mehr als 16 Empfänger zu schalten, können auch mehrere Keyboards in das System integriert werden.
Ergänzt werden die zentralen Komponenten durch eine Art intelligentes Keyboard namens Memory, das die Abspeicherung von Fahrstraßen ermöglicht und ein Interface-Modul, das eine Verbindung zur seriellen Schnittstelle eines Computers herstellt.
All diese Komponenten sind durch einen gemeinsamen Datenbus(I²C-Bus) miteinander verbunden. Die Central Unit setzt die von den verschiedenen Eingabegeräten kommenden Befehle um und schickt sie über die Gleise bzw. parallel dazu verlegte Versorgungsleitungen zu den Befehlsempfängern. Gegebenenfalls muss die Gesamtanlage dazu in mehrere Stromkreise zerlegt werden, um die Gesamtleistungsaufnahme pro Stromkreis nicht zu groß werden zu lassen. Jeder Stromkreis wird hierzu über einen Booster genannten Digitalverstärker an die Central Unit angeschlossen.
 Delta-Fahrgerät
Delta-FahrgerätDas klassische Märklin-Digitalsystem erlaubt die Ansteuerung von 80 Lokomotiven und 256 ortsfesten Empfängern über denselben Datenbus. In den 1990er Jahren wurde das System um die sogenannten Delta-Komponenten ergänzt. Diese verwenden dieselben Befehlsformate, verzichten aber auf die Ansteuerung ortsfester Empfänger und können nur maximal fünf Lokomotiven adressieren.
Alternativ kann auch der Computer selbst als Zentrale verwendet werden, z.B. mit der Software Digital Direct for Linux oder Rocrail.
Empfänger (Decoder) und Sender
Grundsätzlich gibt es Decoder für drei verschiedene Einsätze:
- Decoder für die Ansteuerung von Motoren und Funktionen auf Lokomotiven.
- Decoder für Schaltfunktionen wie zum Beispiel das Ansteuern von Weichen und Signalen.
- Spezielle Empfänger und Sender zum Beispiel für die Ansteuerung spezieller Einrichtungen wie Kräne oder das Rückmelden.
Empfänger (Decoder) für Lokomotiven
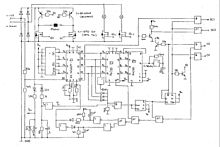 Bereits historisch: Decoder-Schema eines Studenten vom März 1986
Bereits historisch: Decoder-Schema eines Studenten vom März 1986 Durch einen Studenten gebauter Decoder für das Märklin-Digital-System vom März 1986.
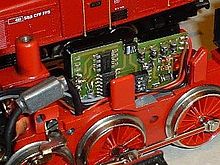
Durch einen Studenten gebauter Decoder für das Märklin-Digital-System vom März 1986.Die in den Lokomotiven eingebauten Decoder übernehmen die interne Ansteuerung von Motoren und Funktionen. Die notwendige starke Miniaturisierung aufgrund knappen Platzes war der entscheidende Entwicklungsschritt hin zur digitalen Modellbahn. Insbesondere dem Märklin-System kam dabei zugute, dass schon die klassischen Märklin-Lokomotiven neben dem Motor immer noch einen zweiten Baustein in der Lokomotive benötigten, das Umschalt-Relais zur Fahrtrichtungsänderung, sodass im Inneren der Lok immer Platz durch Ausbau des Umschalters gewonnen werden konnte. Anstelle des Umschalters wurde dann der Decoder eingebaut. Die erste Generation digitaler Märklin-Lokomotiven wurde bei vielen Modellen durch diese eine Änderung aus ihrem nicht-digitalen Pendant weiter entwickelt. Auch der Selbstumbau vorhandener Lokomotiven war für den geübten Heimwerker vergleichsweise leicht durchführbar.
In der Geschichte des Märklin-Digitalsystems hat es verschiedene Decoderbauarten gegeben, die unterschiedliche Motortypen oder verschiedene Zusatzfunktionen ansprechen konnten. Da mit dem Digitaldecoder der Lokomotivmotor von der Versorgungsspannung entkoppelt ist, konnten auch ganz neue Motortypen eingesetzt werden, so zum Beispiel bürstenlose Motoren wie der C-Sinus-Hochleistungsantrieb. Wurde zunächst nur eine einzige Zusatzfunktion unterstützt (meist das Schalten von Licht), waren es bald bis zu fünf, einschließlich Anfahrt- und Bremsverzögerung; heutige Decoder unterstützen auch Sound und die Ansteuerung von bürstenlosen Motoren.
Der Decoder ist so konzipiert, dass eine damit ausgerüstete Lokomotive auch auf klassisch angesteuerten Anlagen eingesetzt werden kann. Das gilt auch für die vereinfachte Variante, den Decoder des Delta-Systems. Die übergroße Mehrzahl der Märklin-Lokomotiven wird deshalb heute grundsätzlich mit einem Decoder ausgeliefert. Fast alle älteren Modelle lassen sich mit Bausätzen auf die Steuerung mit Digitalbefehlen umrüsten.
Alle Märklin-Digital- und Delta-System-Decoder sind technisch grundsätzlich für 80 Adressen ausgelegt. Bei den Märklin-Digital-Decodern ist es auch möglich, die 80 Adressen zu nutzen, bei den vereinfachten Decodern für das Delta-System sind jedoch nur 15 Adressen einsetzbar.
Decoder für das Delta-System
 Märklin-Delta-System-Decoder mit Zusatzfunktion (Märklin-Artikel 66031)
Märklin-Delta-System-Decoder mit Zusatzfunktion (Märklin-Artikel 66031)Wahrscheinlich um das preiskritische und durch seinen Bocksprung bekannte, aber im Unterhalt recht heikle Umschalt-Relais zu ersetzen, sowie um das doch für damalige Verhältnisse recht teure Märklin-Digital-System durch ein kostengünstiges System zu ergänzen, werden seit 1992 bis heute vereinfachte Decoder für das Delta-System produziert. Dieser Decoder für das Delta-System ist aufwärtskompatibel, also uneingeschränkt sowohl auf dem Märklin-Digital-System als auch auf dem Märklin Systems einsetzbar. Dieser Decoder verdrängte auch die damals gerade aufkommenden elektronischen Fahrtrichtungsschalter. Um diesen Decoder gegenüber dem Märklin-Digital-System kostengünstiger zu gestalten, wurden zunächst die DIP-Schalter weggelassen; die Adresse musste durch Lötbrücken festgelegt werden. Diese Generation wurde sehr rasch durch einen Decoder mit vier statt den beim Märklin-Digital-System üblichen acht DIP-Schaltern ersetzt, was zu der Begrenzung auf 15 Adressen führt. Ebenso besitzen sie in der Regel keine Möglichkeit zum Schalten von Zusatzfunktionen.
Codiertabelle für Märklin-Delta-Decoder
Adresse Symbol 1 2 3 4 02 - 2 3 4 06 1 - 3 4 08 - - 3 4 18 1 2 - 4 20 - 2 - 4 24 Elektrolok 1 - - 4 26 - - - 4 54 1 2 3 - 56 - 2 3 - 60 Schienenbus 1 - 3 - 62 - - 3 - 72 Diesellok 1 2 - - 74 - 2 - - 78 Dampflok 1 - - - 80 Handregler **) 1 2 3 4 Konventionell *) - - - - - Wenn die Nummer des Schalters angegeben ist: Schalter = ON (Ein)
- *) Konventioneller Wechselstrombetrieb für Delta-Decoder, die nicht automatisch zwischen digitalem und konventionellem Betrieb umschalten.
- **) Zusatzhandregler
Empfänger (Decoder) für Schaltfunktionen
Auch zur Ansteuerung von Weichen und Signalen gibt es spezielle Decoderbausteine, die ebenfalls an das Gleis oder dessen Datenbus angeschlossen werden und bis zu vier Weichen und Signale steuern können. Ein anderer Decodertyp ist für das Schalten von Dauerverbrauchern wie Lampen und dergleichen gedacht.
Spezielle Empfänger und Sender
Die Rückmeldungen von Gleiskontakten oder anderen Sensoren werden in einem weiteren Decodertyp gesammelt, der bis zu 16 Eingangssignale verarbeiten kann. Dieser wird nicht an den Gleis-Datenbus angeschlossen, sondern direkt an den Datenbus zwischen den Zentralgeräten. Bis zu 16 dieser Decoder können hintereinander geschaltet werden.
Im Laufe der Zeit sind verschiedene Sonderbauformen auf den Markt gekommen. Neben Spezialbausteinen zur digitalen Ansteuerung des Märklin-Modellkrans oder der Drehscheibe sind das insbesondere spezielle Weichendecoder, die direkt in die Weiche eingebaut werden und so, da sie ihre Steuerinformation ja direkt aus dem Gleis bekommen, keinerlei zusätzliche Verkabelung mehr benötigen.
Geschichtliche Einordnung
Vor der Einführung des Märklin-Digital-Systems wäre es technisch durchaus möglich gewesen, auf dem Märklin-Gleis zwei Züge (mit Fahrleitung vier Züge) gleichzeitig verkehren zu lassen, durch das Vorschalten von Dioden, sodass die eine Lokomotive auf der einen Halbwelle und die andere Lokomotive auf der anderen Halbwelle fuhr. Im Gegensatz zu den Firmen Trix (Trix e.m.s ab 1973 im Programm) und Jouef (Jouefmatic 1968 bis 1981 im Katalog) unterstützte Märklin eine solche analoge Mehrzugsteuerung aber nicht.
Die eigentlich nur in Frankreich bekannte Mehrzugsteuerung Jouefmatic der Firma Jouef ermöglichte neben einer Dauerzugbeleuchtung immerhin den unabhängigen Betrieb von bis zu acht Lokomotiven. Die Daten wurden dabei auf eine Wechselspannung aufmoduliert und durch die jeweils auf eine bestimmte Frequenz abgestimmten Decoder empfangen.
Allgemein wird Märklin Digital als ein bedeutender Einschnitt in der Modellbahntechnik gewertet. Erstmals ist es mit dem System möglich, viele Lokomotiven und Schaltfunktionen (Lokbeleuchtung, Signale, Weichen usw.) in einem einzigen Stromkreis unabhängig zu steuern. Dies ist aber auch die einzige echte Innovation des Systems. Steuerbusse für ortsfeste Geräte oder Rückmeldebusse gibt es zu der Zeit schon länger auf dem Markt, sogar mit der Möglichkeit der Computeranbindung.
Auch die elektronische Motorsteuerung ist nichts grundsätzlich Neues. Fremdanbieter haben entsprechende Umrüstsätze, insbesondere für Märklin-Lokomotiven, schon seit Anfang der 1980er Jahre im Programm. Märklin selbst hatte mit dem Steuergerät "6600" ein System im Angebot, das mittels Elektronik eine komfortable Ansteuerung von Lokomotiven ermöglichte.
Das ursprüngliche Märklin-Digitalsystem hat zudem einige Beschränkungen gegenüber anderen nur wenig später auf den Markt gekommenen Steuersystemen. Neben der verhältnismäßig kleinen Zahl von 80 unabhängig adressierbaren Lokomotiven ist dies vor allem die geringe Anzahl von nur 14 Fahrstufen, die an die Lokomotiven gesendet werden können. Zudem lehnt sich das System bei der Übermittlung der Richtungsinformation an das klassische Märklinsystem an. Dort wurde durch einen hohen Spannungspuls das Fahrtrichtungsrelais in der Lokomotive angesprochen und die Fahrtrichtung geändert, im Digitalsystem übernimmt diese Aufgabe ein spezieller Befehl (Fahrstufe 1 - erst ab Fahrstufe 2 wird der Motor mit Strom versorgt). Als Folge ist es nicht ohne Weiteres möglich, die Fahrtrichtung der Lokomotive eindeutig absolut vorzugeben, was insbesondere bei Computersteuerungen problematisch ist.
Schließlich bot Märklin Digital zu Beginn keinerlei fortschrittliche Simulations-Funktionen wie zum Beispiel digital simulierte Anfahr- oder Bremsverzögerung. Solange die Steuerung nicht über Computer erfolgte, wurden Bewegungen des Geschwindigkeitsgebers direkt auf die Lokgeschwindigkeit umgesetzt – wie bei der klassischen, spannungsbasierten Steuerung. Hier ging sogar das erwähnte analoge Steuergerät 6600 weiter, das eine zuschaltbare Verzögerung besitzt (getrennt regelbar für das Beschleunigen und Verzögern).
Märklin hat die Einschränkungen des Systems in den folgenden Jahren und Jahrzehnten schrittweise entschärft oder aufgehoben, wobei bemerkenswerterweise eine weitgehende Kompatibilität zwischen alten und neueren Systemkomponenten gewahrt bleibt. Ende 2004 hat Märklin eine komplett neue Generation von Steuergeräten unter dem neuen Namen Märklin Systems (kurz "mfx") auf den Markt gebracht, das diese Fortentwicklungen zusammenfasst und weitere Neuerungen bietet.
Schon vor der Einführung von digitalen Modellbahnsteuerungen waren Produkte des Marktführers Märklin infolge des Mittelleiter-Gleissystems in der Spur H0 inkompatibel zu anderen Modellbahnsystemen. Mit Märklin-Digital setzte das Unternehmen weiter konsequent auf ein eigenes System und sicherte sich so seinen Markt, während sich das DCC-Format des Zweileiter-Gleissystems erst in letzter Zeit langsam, aber stetig verbreitet. Alternative Systeme anderer Hersteller können seit Ende der 1990er Jahre sowohl im Motorola- als auch im verbreiteten DCC-Format senden und empfangen, zum Teil sogar im selben Steuerkreis.
Ein gängiger Trick von Mehrsystem-Steuerungen (z.B. Uhlenbrock) ist, abwechselnd bzw. umlaufend Impulse aller beteiligter Digitalsysteme an die Gleisstromversorgung zu geben - und darauf zu setzen, dass die jeweils "fremden" Decoder die nicht für sie bestimmten falschformatigen Impulse ignorieren.
Einflüsse auf Arnold Digital
Der Hersteller Arnold aus Nürnberg entwickelte nach dem Erscheinen von Märklin Digital eine eigene digitale Mehrzugsteuerung für sein Zweileiter-Gleichstrom-N-Sortiment, wobei er allerdings mit Märklin kooperierte. Arnold Digital erschien im Jahre 1988. Aufgrund der Kooperation mit Märklin sind einige Steuerkomponenten von Arnold Digital mit Märklin Digital kompatibel und können zum Teil gemeinsam in einer Anlage verwendet werden. Auch optisch sind sich die Steuerkomponenten der beiden Systeme recht ähnlich.[1][2]
Quellen
- ↑ Infoffizielle Arnold Digital- Website, www.Arnold-Digital.com
- ↑ Geschichte der digitalen Mehrzugsteuerung, N-Bahn-Freunde Worms, [1], www.nbf-worms.de




Wikimedia Foundation.