- Asimo
-
 Honda ASIMO
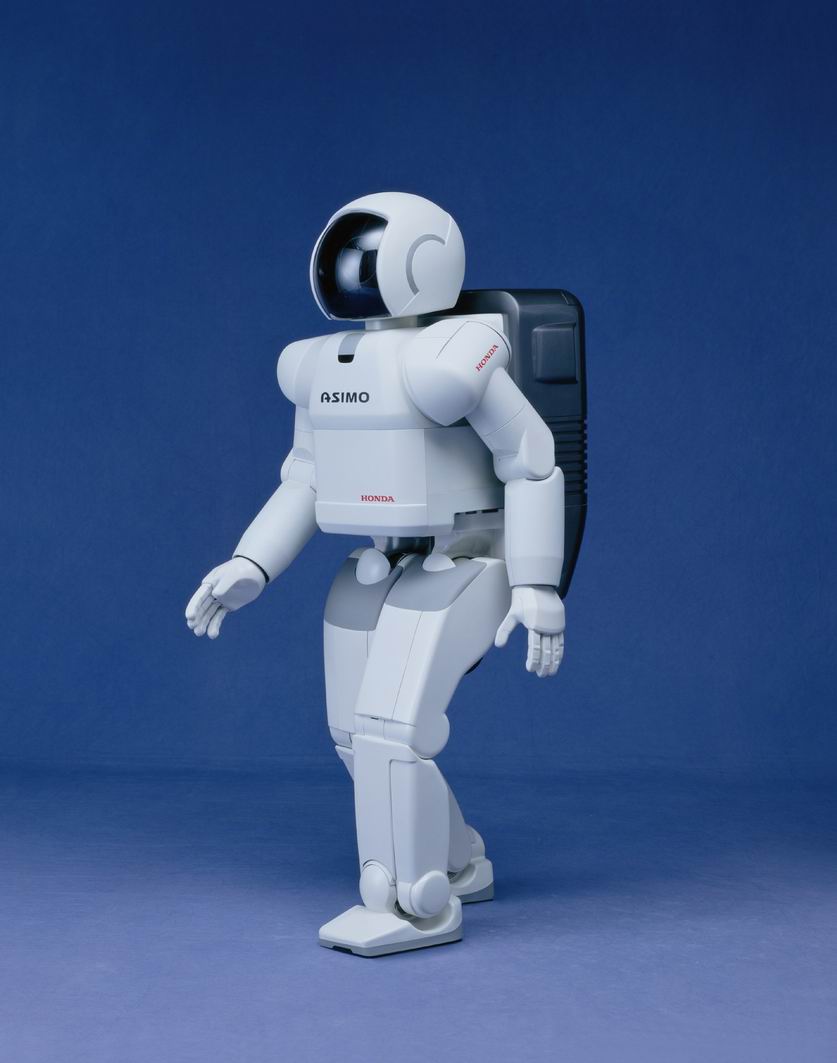
Honda ASIMOASIMO ist ein von Honda entwickelter humanoider Roboter. Er ist ein Robotertyp, der sich auf zwei Beinen (bipedal) fortbewegen kann und dabei eine Bewegung ausführt, die dem menschlichen Gang ähnlich ist.
„ASIMO“ ist ein Akronym für „Advanced Step in Innovative Mobility“. Offiziell bestreitet Honda einen Zusammenhang mit dem Namen des Science-Fiction-Schriftstellers Isaac Asimov. Auf Japanisch wird das Wort „ashimo“ ausgesprochen und bedeutet „auch Beine“.
Inhaltsverzeichnis
Details
ASIMO ist der zur Zeit am weitesten entwickelte humanoide Roboter von Honda. Die Hardware des am 15. Dezember 2004 vorgestellten Forschungsmodells des ASIMO ist 1,20 Meter groß und wiegt 54 Kilogramm. Die integrierte Stromversorgung reicht für etwa 40 Minuten Betriebszeit, während sich der Roboter gehend fortbewegt. Auf der anderen Seite benötigt der Akku ca. 3 Stunden, bis er voll aufgeladen ist. ASIMO besitzt in der aktuellen Version 34 Freiheitsgrade. Am 13. Dezember 2005 wurde eine verbesserte Steuerung vorgestellt, die es dem Roboter erlaubt, sich mit einer Geschwindigkeit von etwa 2,7 Kilometer pro Stunde (km/h) beim Gehen fortzubewegen (vorheriges Modell: 2,5 km/h). Diese Geschwindigkeit wird auf 1,6 km/h reduziert, wenn ASIMO etwas trägt. Außerdem kann ASIMO in der aktuellen Version mit bis zu 6 km/h „rennen“ (vorheriges Modell: 3 km/h). Die Phasen, in denen ASIMOs Füße dabei gleichzeitig den Boden nicht berühren, sind 80 Millisekunden (ms) lang (vorheriges Modell: 50 ms). ASIMO ist außerdem erstmals in der Lage, mit 5 km/h im Kreis zu rennen (Kreisradius: 2,5 m).
Honda begann bereits 1986 mit der Entwicklung humanoider Roboter, hielt die Entwicklung jedoch bis zur Vorstellung des „P2“ im Dezember 1996 unter Verschluss. Im Sommer 1999 begann man im „Honda Research & Development Wako Fundamental Technical Research Center“ in Japan mit der Entwicklung des ASIMO, der schließlich am 31. Oktober 2000 fertiggestellt und am 20. November 2000 der Öffentlichkeit vorgestellt wurde.
2004 wurde ASIMO in die Robot Hall of Fame aufgenommen.
Im Jahre 2004 waren ca. 30 Asimos im Einsatz.
Seit 2007 sind zwei ASIMOs auch in Deutschland. Sie dienen an der Universität Bielefeld zur Untersuchung von Bewegungen.
Technische Daten
P1
- Höhe: 191 Zentimeter
- Gesamtgewicht: 175 Kilogramm
P3
Der „P3“ ist der 3. Prototyp von Honda und wurde im September 1997 fertiggestellt.
- Höhe: 160 Zentimeter
- Tiefe: 55 Zentimeter
- Breite: 60 Zentimeter
- Gesamtgewicht: 130 Kilogramm
- Maximale Betriebszeit: 25 Minuten
- Maximale Geschwindigkeit (gehend): 2 km/h
- Maximale Zuladung pro Hand: 9 Kilogramm
- CPU(s): 4 x „Microspec III“
- Batterie: 138 V, 6 Ah; Typ: Nickel-Zink
ASIMO
Die erste Version von ASIMO wurde im November 2000 der Öffentlichkeit vorgestellt. Seine aktuelle Version wurde erstmals am 15. Dezember 2004 gezeigt, Verbesserungen in der Steuerung wurden am 13. Dezember 2005 bekannt gegeben.
- Höhe: 120 Zentimeter
- Tiefe: 44 Zentimeter
- Breite: 45 Zentimeter
- Gesamtgewicht: 43 Kilogramm
- Maximale Betriebszeit (gehend): 40 Minuten
- Maximale Geschwindigkeit (gehend): 2,7 km/h
- Maximale Geschwindigkeit (gehend, mit Zuladung von 1 kg in den Händen): 1,6 km/h
- Geschwindigkeit (rennend): 6 km/h
- Geschwindigkeit (rennend in Kurven): 5 km/h
Freiheitsgrade:
- Kopf: 3
- Arme: je 7
- Hände: je 2
- Torso: 1
- Beine: je 6
- Gesamt: 34
Demonstrationen
Bei zwei Präsentationen im Jahr 2006 kam zu Zwischenfällen, bei denen ASIMO vor Publikum eine Treppe hinaufsteigen wollte und dabei die Stufen hinunter stürzte.[1][2]
Siehe auch
Weblinks
- Honda Worldwide | ASIMO (englisch) – Hersteller-Webseite
- Die Humanoiden Roboter von Honda (englisch/deutsch) – Informationen und Videos zu ASIMO und P1 bis P3
- ASIMO Humanoid Robot - Honda Robotic Technology Tours N America (englisch) – ASIMO-Präsentations-Webseite von Honda
- mmAG – Beispiele on-demand – Videos der Vorstellung von ASIMO an der TU Darmstadt
- Asimo kann Händchen halten – Artikel von heise online, vom 13. Dezember 2005
- Asimo-Roboter sind künftig auch in Bielefeld zu Hause – Artikel von heise online, 10. Oktober 2007
Einzelnachweise
Wikimedia Foundation.