- Positionsregelung
-
Lageregelung oder Positionsregelung bezeichnet die Regelung der Position eines Robotersystems. Dabei kann die Regelung des kompletten Systems etwa in der Servicerobotik oder die Regelung des Endeffektors z. B. bei Industrierobotern gemeint sein. Die Struktur des Regelkreises ist häufig eine Ineinanderschachtelung von Lage-, Drehzahl- und Stromregelkreis. siehe Kaskadenregelung
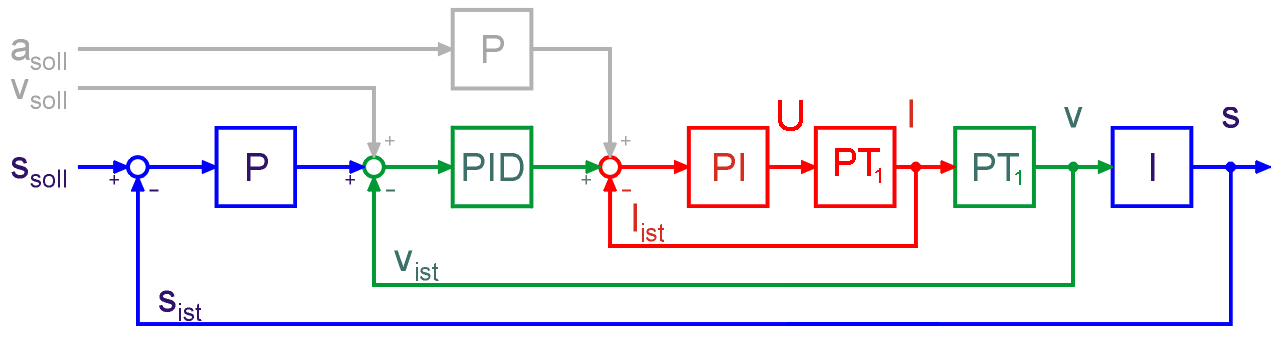
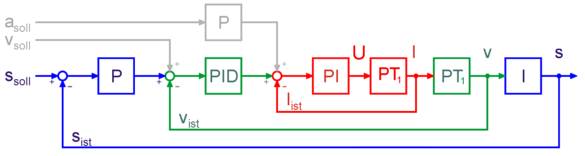 Blockschaltbild Lageregelung als Kaskadenregelkreis mit Vorsteuerung
Blockschaltbild Lageregelung als Kaskadenregelkreis mit Vorsteuerungs: Position (Lage), v: Geschwindigkeit (Drehzahl), a: Beschleunigung, U: Spannung, I: Strom im Motor, PT1 (rot): Induktivität des Elektromotors, PT1 (grün): Masse von Motor und Maschinenteil
blau - Lageregelkreis
grün - Drehzahlregelkreis
rot - Stromregelkreis
grau - Vorsteuerung der Drehzahl und BeschleunigungDie Sollwertvorgaben kommen von der übergeordneten Positionssteuerung.
Reglereinstellung
Um den Antrieb tatsächlich betreiben zu können, sind sinnvolle Einstellungen für die Verstärkungen der Regelkreise vorzugeben bzw. zu wählen. Dies geschieht z.B. durch eine automatische Regleroptimierung oder alternativ durch auf Erfahrung beruhende Einstellwerte. Moderne Verfahren ermöglichen auch eine Adaption der Parameter z.B. in Abhängigkeit von der Massenträgheit des Systems.
Ungünstige Reglereinstellungen führen hingegen z.B. zum Überschwingen des Endeffektors eines Roboters oder zum "Brummen" des Antriebes. Beides ist unerwünscht, da es sich negativ auf das Fahrverhalten des Roboters auswirkt.
Bei der Reglereinstellung wird zuerst der innere Kreis optimiert, dann folgen die äußeren Kreise.
Literatur
- Cumhur Baspinar: Robuste Kraft- und Positionsregelung von bewegungseingeschränkten Robotern mit idealen und elastischen Gelenken. Shaker, Aachen 2005, ISBN 978-3-8322-3651-9.
- Mathias Gutemann: Lageregelung für eine reaktionsschnelle Aktoreinheit mit elastischem Antriebsstrang. Shaker, Aachen 2008, ISBN 978-3-8322-7032-2.
Wikimedia Foundation.