- Scheinbare Größe
-
Inhaltsverzeichnis
Scheinbare Größe
Die scheinbare Größe (auch scheinbarer Durchmesser, Sehwinkel) eines Objekts ist der Winkel, unter dem es von einem Beobachter wahrgenommen wird.
 Skizze: scheinbare Größe
Skizze: scheinbare Größe
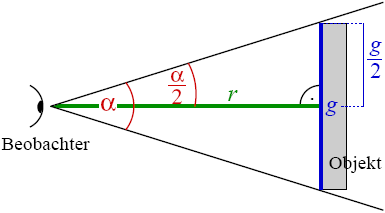
Nebenstehende Abbildung verdeutlicht den Zusammenhang zwischen scheinbarer Größe α, Entfernung r und wahrer Ausdehnung g eines Objekts. Es lässt sich daraus folgende Beziehung zwischen den drei Größen ableiten:
Ist der Betrachtungsabstand r zu einem Objekt gleich dessen Größe g, so erscheint das Objekt stets unter einem Winkel α von
In der Geodäsie kann mittels eines Objekts mit genormter Größe g, beispielsweise einer senkrecht aufgestellten Latte, aus der scheinbaren Größe α die Entfernung r berechnet werden:
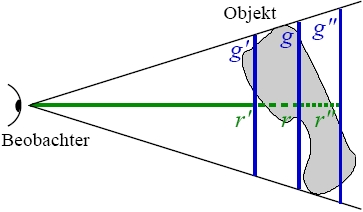
 Unterschiede bei den berechneten Ausdehnungen g, g' und g" eines unregelmäßigen Objekts abhängig von den gegebenen Abständen r, r' und r"
Unterschiede bei den berechneten Ausdehnungen g, g' und g" eines unregelmäßigen Objekts abhängig von den gegebenen Abständen r, r' und r"In der Astronomie kann bei bekanntem Abstand r (siehe Entfernungsbestimmung) eines Objekts dessen ungefähre wahre Ausdehnung g berechnet werden:
Ein Problem hierbei ist, dass astronomische Objekte wie z. B. diffuse Nebel häufig unregelmäßige Formen aufweisen oder solche wie Galaxien meist einen Neigungswinkel besitzen. Deshalb ergeben verschiedene Methoden zur Entfernungsmessung möglicherweise unterschiedliche Entfernungen r. Daraus resultieren in der Berechnung bei gleicher scheinbarer Größe α leicht unterschiedliche Ausdehnungen g. Aufgrund der riesigen Entfernungen spielt dies in der Praxis allerdings eine eher untergeordnete Rolle. Bei Beobachtungen von Objekten in kosmologischen Entfernungen wird der oben dargestellte Zusammenhang zwischen scheinbarer Größe, Ausdehnung und Entfernung eines Objekts zudem durch die Raumkrümmung erheblich verkompliziert.
Vertikaler und horizontaler Sehwinkel
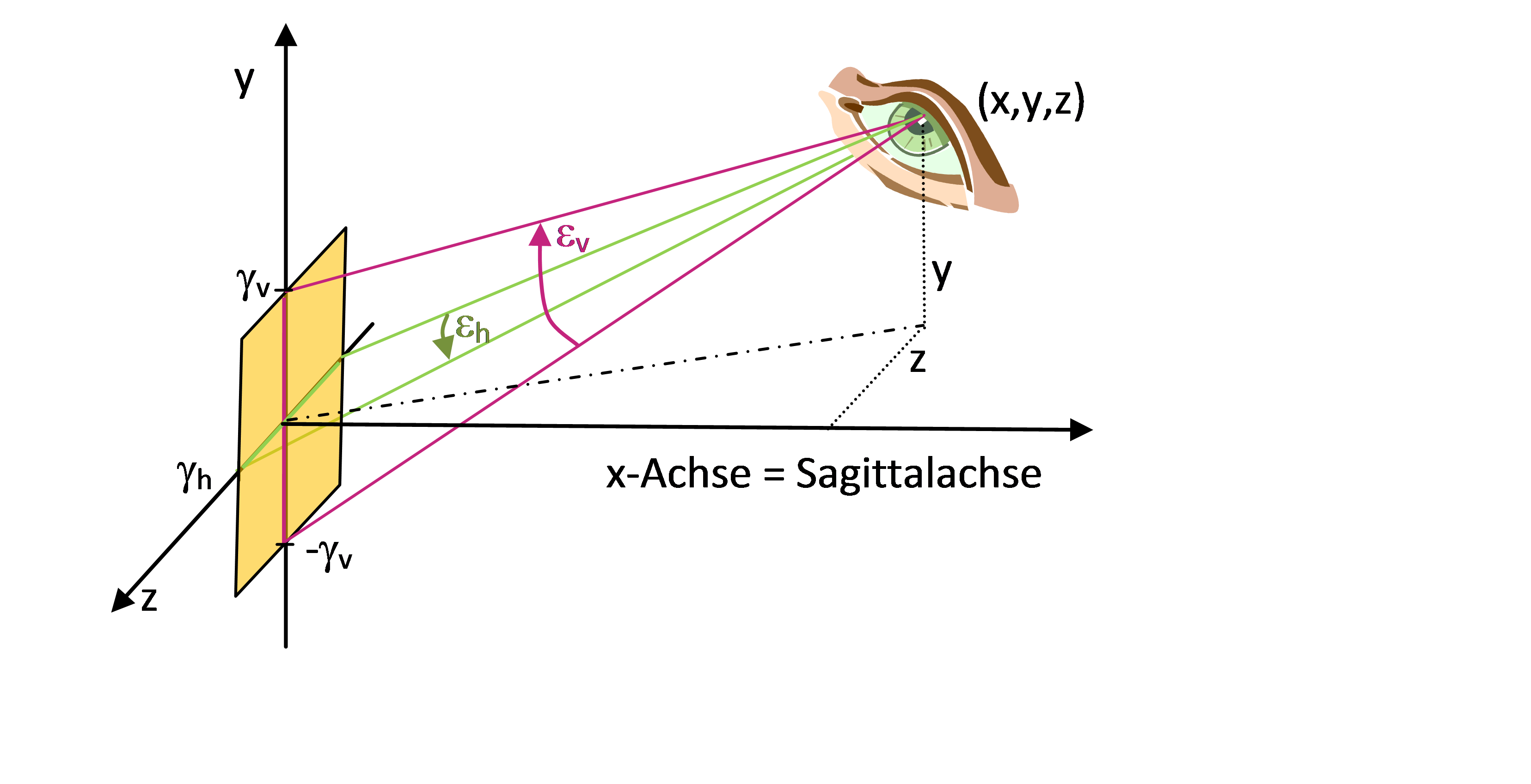
In der Fotografie verwendet man den vertikalen und den horizontalen Sehwinkel eines Gegenstands. Den vertikalen Sehwinkel εv eines Gegenstands definiert man, indem man dem vom Auge fixierten Gegenstand ein waagrecht liegendes Rechteck umschreibt, dann die beiden vom Auge ausgehenden Strahlen zu den Endpunkten der senkrechten Strecke durch den Rechtecksmittelpunkt zieht und den Winkel zwischen diesen Strahlen bestimmt. Analog ist der horizontale Sehwinkel εh der Winkel zwischen den beiden Strahlen vom Auge zu den Endpunkten der waagrechten Strecke durch den Rechtecksmittelpunkt.
 Abbildung: Der vertikale und der horizontale Sehwinkel
Abbildung: Der vertikale und der horizontale SehwinkelWählt man das kartesische Koordinatensystem, dessen Ursprung im Mittelpunkt des Rechtecks liegt, dessen y- und z-Achse die vertikale und horizontale Symmetrieachse des Rechtecks bilden und bei dem sich der Betrachter im Halbraum x > 0 befindet, so lassen sich diese beiden Sehwinkel für das Rechteck mit der vertikalen Seitenlänge Gv = 2γv und der horizontalen Seitenlänge Gh = 2γh für einen beliebigen Beobachterpunkt (x,y,z) trigonometrisch bestimmen:
 ,
, .
.
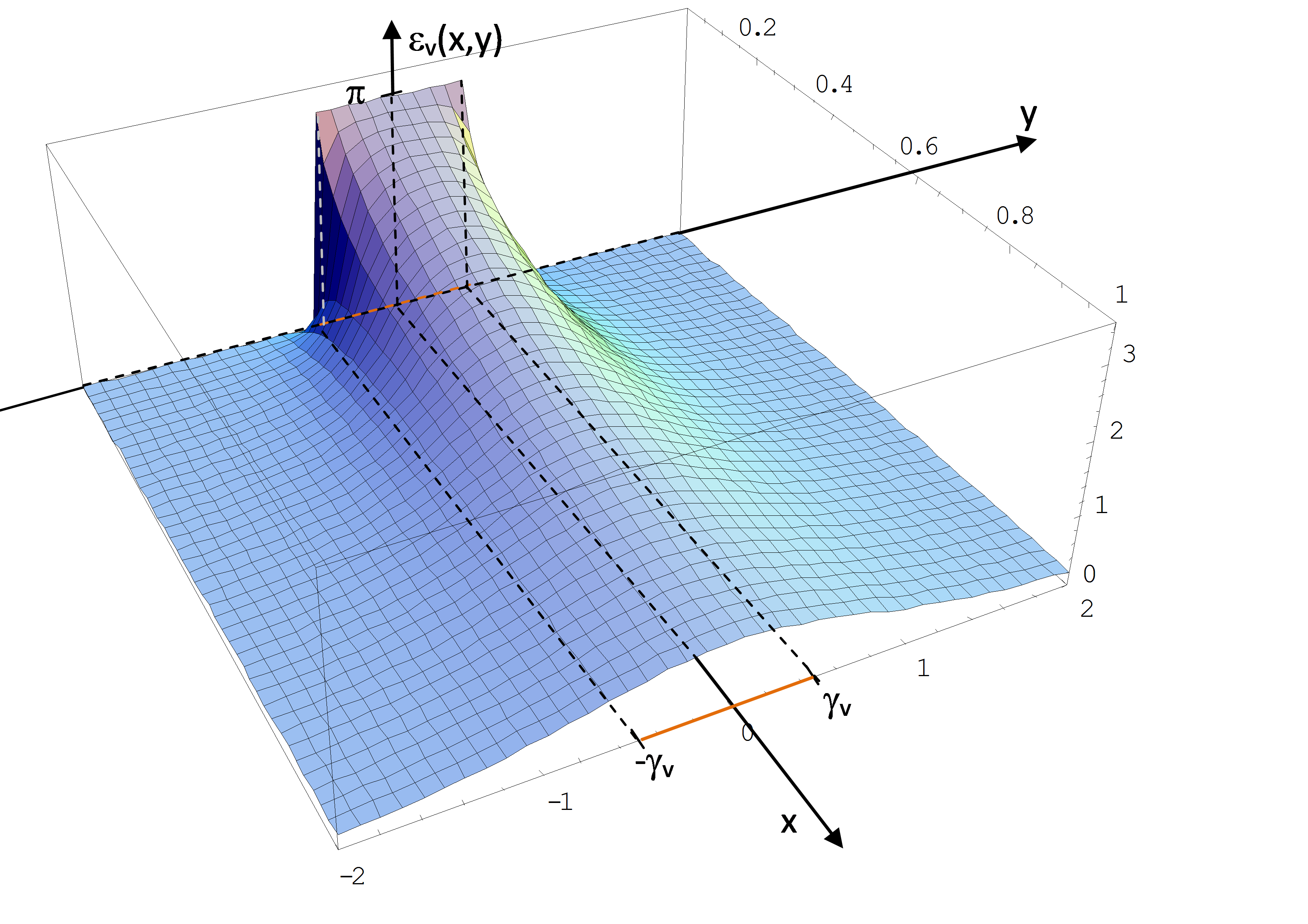
Auf Grund der Rotationssymmetrie des Funktionsgraphen des vertikalen Sehwinkels εv(x,y,z) bei der Drehung um die y- Achse ist (Zylindersymmetrie) kann dessen Untersuchung auf die x,y-Ebene eingeschränkt werden. Für die Sehwinkelfunktionen als Funktionen nur der Ebenenkoordinaten x und y erhält man die folgenden Terme und die in den Abbildungen dargestellten Funktionsgraphen:
 ,
,
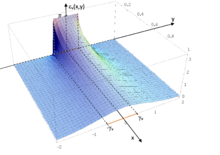 Abbildung: Graph des vertikalen Sehwinkels
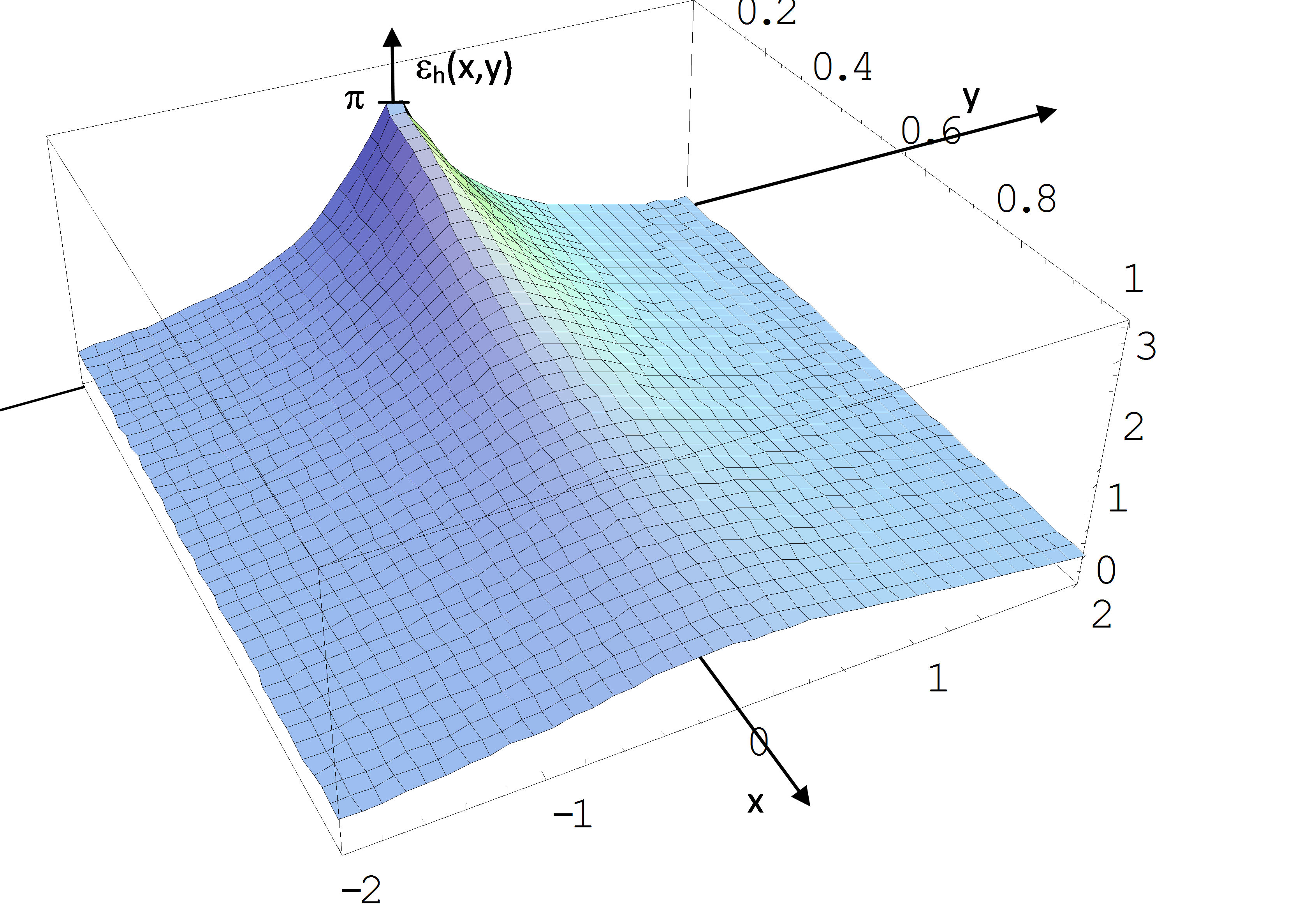
Abbildung: Graph des vertikalen Sehwinkels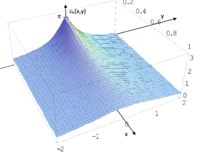 Abbildung: Graph des horizontalen Sehwinkels
Abbildung: Graph des horizontalen SehwinkelsMaximale Sehwinkel eines Gegenstandes für eine Kamera
Für die vollständige und scharfe Abbildung eines fest vorgegebenen Objekts mittels einer Kamera ist der Kamerastandort auf einen Zulässigkeitsbereich Z eingeschränkt. Dieser Bereich Z wird durch vier Ungleichungen beschrieben, in welche die Kameraparameter eingehen:
1) εv(x,y,z) ≤ αv,
2) εh(x,y,z) ≤ αh,
3) ρ(x,y,z) =
 ≥ d = gmin - f,
≥ d = gmin - f,4) x > 0,
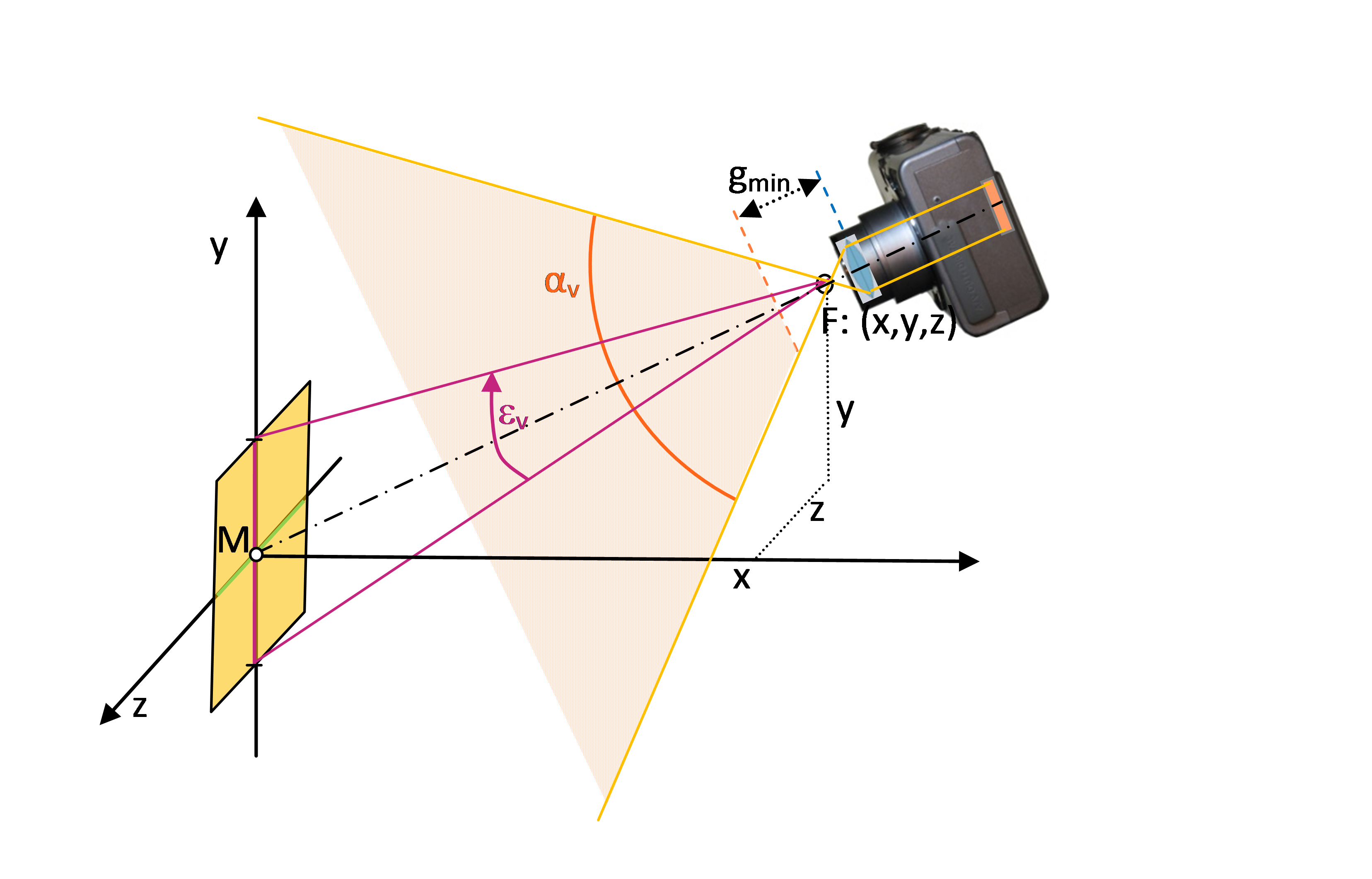
wobei αv der vertikale Bildwinkel, αh der horizontale Bildwinkel, gmin der minimale Objektabstand und f die fest fixierte Brennweite der Kamera sind.
 Abbildung: Bei vollständiger Abbildung des Objekts ist der Sehwinkel des Objekts nicht größer als der Bildwinkel der Kamera
Abbildung: Bei vollständiger Abbildung des Objekts ist der Sehwinkel des Objekts nicht größer als der Bildwinkel der KameraSucht man in diesem Bereich Z einen Standort, in dem der vertikale Sehwinkel εv bzw. der horizontale Sehwinkel εh des Objekts für die Kamera maximal ist, so liefert dies jeweils ein nichtlineares Optimierungsproblem, dessen Zielfunktion durch den zu maximierenden Sehwinkel und dessen Zulässigkeitsbereich durch Z gegeben ist. Will man dagegen für eine auf einem Kamerakran montierte Kamera einen Standort finden, in dem sowohl der vertikale als auch der horizontale Sehwinkel maximal sind, so führt dies auf die Lösung des Maximierungsproblems, bei dem beide Sehwinkel als Zielfunktionen simultan maximiert werden („multikriterielle Optimierung“).
Beschränkt man sich bei der simultanen Maximierung beider Sehwinkel εv und εh auf die x,y-Ebene, so wird der Rand
 des Zulässigkeitsbereichs Z durch zwei der folgenden drei Kreisbögen gebildet:
des Zulässigkeitsbereichs Z durch zwei der folgenden drei Kreisbögen gebildet:Kd :
 ,
,Kh :
 ,
,Kv :
 ,
,mit ηh = γh/tan(αh/2), wv = tan αv, xv = γv/wv, rv = γv•(1+wv2)1/2, ξv = xv + rv = γv/tan(αv/2), 0 < αh, αv < π.
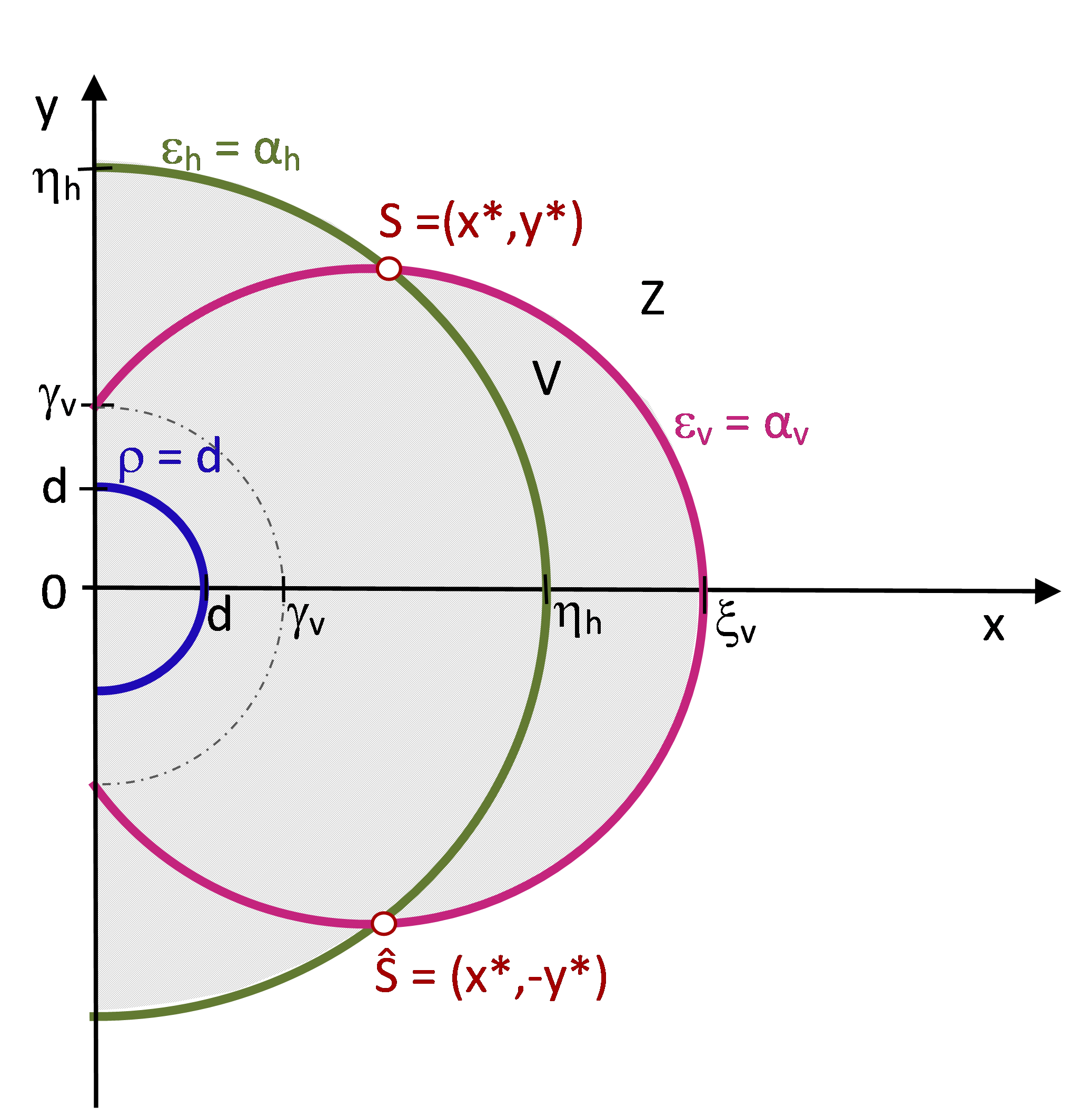
 Abbildung: Der Zulässigkeitsbereich Z und die Standortverbotszone V der Kamera
Abbildung: Der Zulässigkeitsbereich Z und die Standortverbotszone V der KameraFür die Bestimmung des Optimalitätsbereichs Os der simultanen Maximierung beider Sehwinkel εv und εh sind die Fälle I) 0 < αv < π/2, II) αv = π/2, III) π/2 < αv < π und dazu jeweils die Unterfälle 1) R = max{d,ηh} ≤ ξv, 2) ξv < R < γv, 3) R = γv, 4) R > γv zu unterscheiden. Beispielsweise besteht in dem in der Praxis hauptsächlich auftretenden und in der Abbildung dargestellten Fall I.2) der Optimalitätsbereich Os aus den beiden Schnittpunkten S = (x*,y*) und Ŝ = (x*,-y*) der Kreisbögen KR und Kv.
Siehe auch
Literatur
- Franz Pleier: Der optimale Standort für einen Fotografen, W-Seminararbeit am Kepler-Gymnasium Weiden/OPf., 2010




Wikimedia Foundation.