- Schrittmotoren
-
Ein Schrittmotor ist ein Synchronmotor, bei dem der Rotor (drehbares Motorteil mit Welle) durch ein gesteuertes schrittweise rotierendes elektromagnetisches Feld der Statorspulen (nicht drehbarer Motorteil) um einen minimalen Winkel (Schritt) oder sein Vielfaches gedreht werden kann. Schrittmotoren existieren auch in Form von Linearmotoren.
Inhaltsverzeichnis
Positionierung
 Schema eines Schrittmotors - in 4 Schritten eine Umdrehung
Schema eines Schrittmotors - in 4 Schritten eine UmdrehungSchrittmotoren folgen im Prinzip exakt dem außen angelegten Feld und können so ohne Sensoren zur Positionsrückmeldung (Encoder, Drehgeber oder ähnliches) betrieben werden. Sie zeigen damit ein ähnliches Verhalten wie Synchronmotoren. Daher können sie im Gegensatz zu z. B. Servomotoren, welche auf die gewünschte Position eingeregelt werden müssen, einfacher betrieben werden. Für einen besonders homogenen Verlauf werden Schrittmotoren mit einem gleichförmigen Drehfeld angesteuert.
Wird ein Schrittmotor jedoch stark belastet oder zu stark beschleunigt bzw. verzögert, kann es vorkommen, dass der Rotor nicht mehr exakt dem Feld folgt und Schritte übersprungen werden. Bei diesem sogenannten Schrittverlust springt der Motor in die vorherige Position zurück. Durch die mechanische Energie (Trägheit) kommt es bei rasch bewegten Magnetfeldern meist zu einer Serie von verlorenen Schritten. Während längerem Betrieb können sich diese Positionierungsfehler dann aufsummieren und eine ungenaue Positionierung bewirken. Dies kann bei zyklischen Bewegungen oder Rotationsbewegungen dadurch behoben werden, dass die Position des Motors bei jeder Umdrehung oder Zyklus mit einem externen Positionsimpuls eines Sensors in der Grundstellung abgeglichen wird.
Bauformen
 Schrittmotor mit Permanentmagnet
Schrittmotor mit PermanentmagnetMan unterscheidet den Schrittmotor nach seiner Bauform in Reluktanz- und Permanentmagnet-Schrittmotor, wobei man beide Formen auch zu einem Hybridschrittmotor kombinieren kann.
Beim Reluktanzschrittmotor besteht der Rotor aus einem gezahnten Weicheisenkern. Bei diesem Material verschwindet nach dem Ausschalten des Statorstromes das Magnetfeld. Bei eingeschaltetem Strom fließt der magnetische Fluss durch den Weicheisenkern des Rotors. Die Drehbewegung des Rotors kommt zustande, weil vom gezahnten Stator der nächstliegende Zahn des Rotors angezogen wird, da sich so der magnetische Widerstand verringert.
Beim Permanentmagnetschrittmotor besteht der Stator aus Weicheisen und der Rotor aus Dauermagneten, die abwechselnd einen Nord- und einen Südpol aufweisen. Mit dem Stator-Magnetfeld richtet man den dauermagnetischen Rotor so aus, dass eine Drehbewegung entsteht.
Da der Reluktanzschrittmotor keine Permanentmagnete enthält, hat er daher im Gegensatz zum Permanentmagnetschrittmotor auch kein Rastmoment bei ausgeschaltetem Strom. Beim Permanentmagnetschrittmotor ist die Anzahl der Pole (und damit die Auflösung) begrenzt. Der Hybridschrittmotor vereint die Eigenschaften beider Bauformen, indem auf den Permanentmagneten noch ein gezahnter Weicheisenkranz eingefügt wird. Nahezu alle heute erhältlichen Schrittmotoren sind Hybridmotoren.
Als High-Torque Motoren (=hohes Drehmoment) werden häufig Typen bezeichnet, bei denen für den Rotor besonders starke Seltenerdenmagnete
verwendet werden. So lässt sich eine besonders hohe Kraftdichte erzielen.Schrittgeschwindigkeit
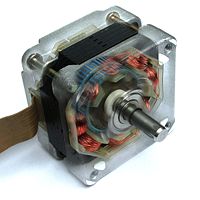
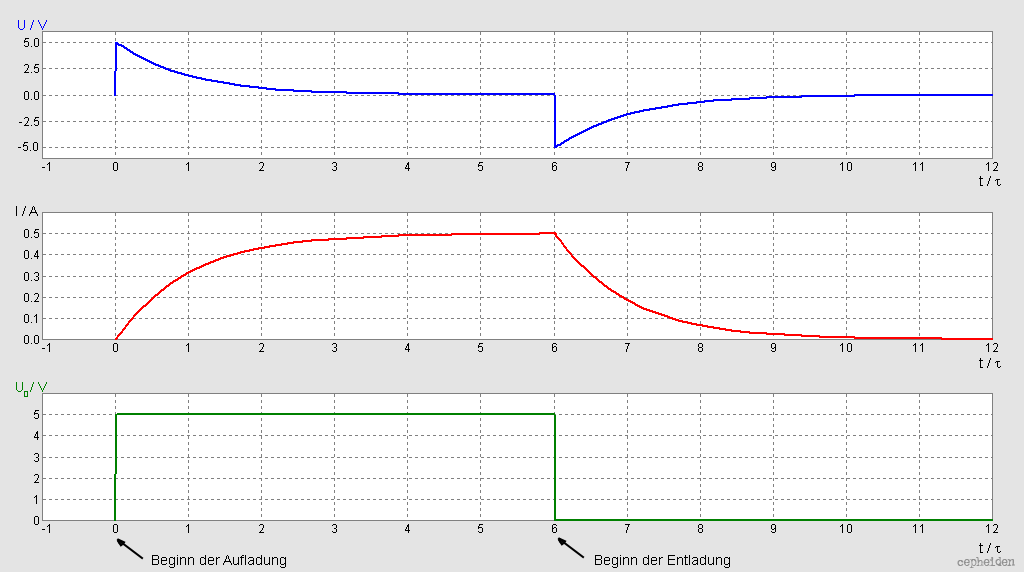
 Zu- und Abschaltvorgang an einer realen Spule (RDraht = 10 Ω) mit „idealer“ Freilaufdiode; oben: Selbstinduktionsspannung, Mitte: Strom, unten: Speisespannung; die Zeitachse ist in auf die Zeitkonstante normierten Einheiten skaliert
Zu- und Abschaltvorgang an einer realen Spule (RDraht = 10 Ω) mit „idealer“ Freilaufdiode; oben: Selbstinduktionsspannung, Mitte: Strom, unten: Speisespannung; die Zeitachse ist in auf die Zeitkonstante normierten Einheiten skaliertEine nennenswerte Leistung bei Schrittmotoren erfordert hohe Ströme und Spulen mit vielen Windungen und Eisenkern, also hoher Induktivität L. Nur so ergeben sich die geforderten starken Magnetfelder. Um die Wärmeentwicklung in den Spulen gering zu halten, sollen die Spulen geringen Widerstand R besitzen. Aus der Kombination beider Forderungen ergibt sich eine hohe Zeitkonstante T, die nur ein langsames Anwachsen der Spulenströme nach dem Einschalten erlaubt, wie im Bild gezeigt ist. Um ein schnelleres Absinken des Stromes nach dem Abschalten zu erreichen, darf man auf keinen Fall Freilaufdioden parallel zur Spule schalten, um unerwünschte Spannungsspitzen zu vermeiden, die die Schalttransistoren gefährden können. Wegen der Formel T = L/R soll zumindest beim Abschalten der wirksame Widerstand RSpule+RParallel so groß wie möglich sein (RParallel liegt in Reihe zur Freilaufdiode). Dadurch steigt aber die Spannungsspitze am Schalttransistor. Für hohe Schrittgeschwindigkeit muss ein Kompromiss gefunden werden. (siehe auch Spule (Elektrotechnik)#Zu- und Abschaltvorgänge bei Gleichstrom)
Genauigkeit
Aufgrund der hohen Polpaarzahl bewegt sich der Rotor eines Schrittmotors mit jedem von außen vorgegebenen Schritt nur mit einem geringen Winkelversatz vorwärts. Üblich sind Polpaarzahlen von über 100, damit sind es im Halbschrittverfahren 400 Schritte je Vollumdrehung. Positioniergenauigkeiten von unter 0,1 Grad sind leicht erreichbar.
Anwendungsgebiete
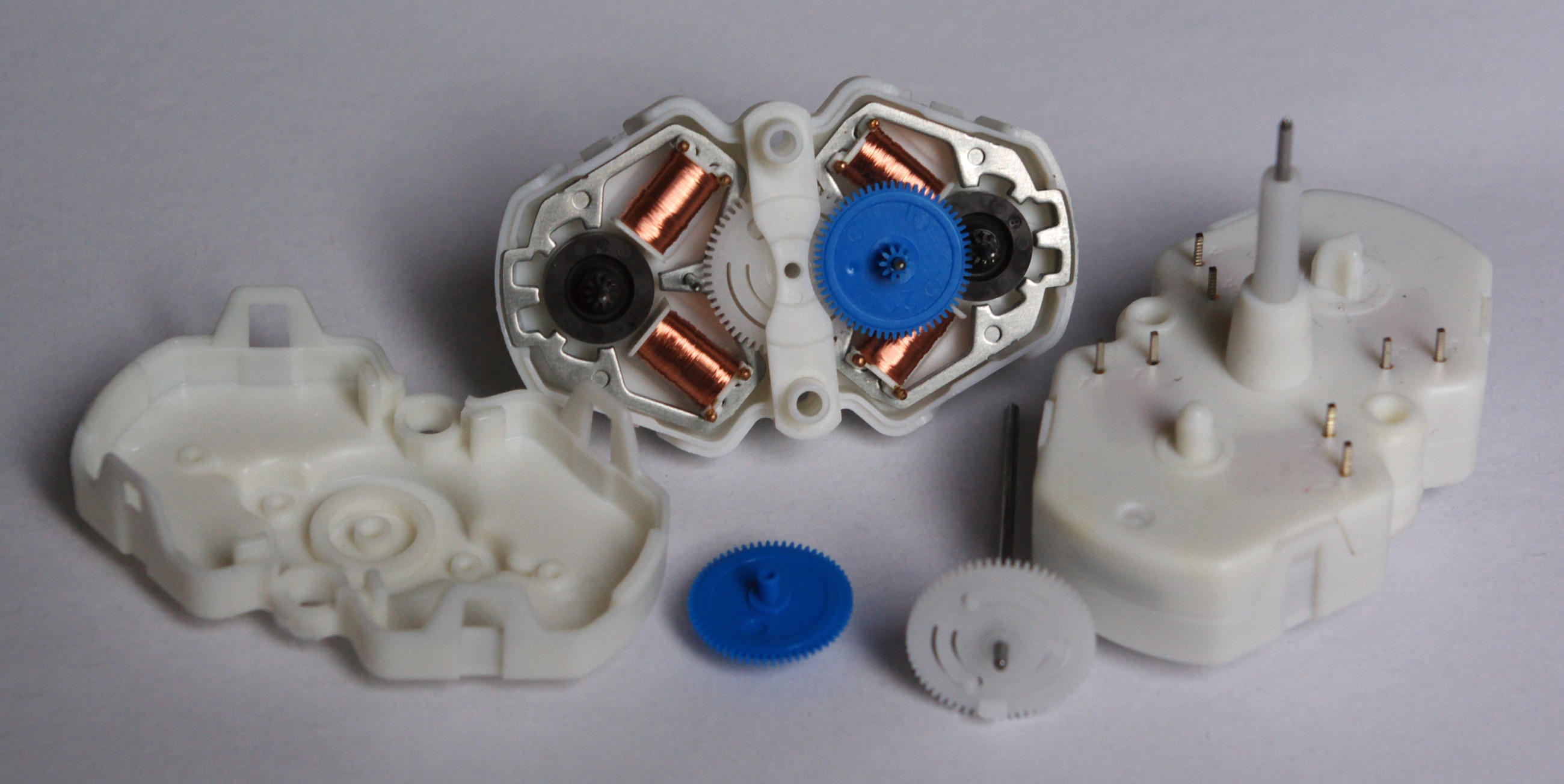
 Doppel-Schrittmotor für Zeigerinstrumente (Kombiinstrument), Bildbreite ca. 12cm
Doppel-Schrittmotor für Zeigerinstrumente (Kombiinstrument), Bildbreite ca. 12cmTypische Anwendungsgebiete sind Drucker, vor allem Matrixdrucker, oder der Antrieb des Schreib-/Lesekopfes in einem Diskettenlaufwerk. Aufgrund ihrer hohen Genauigkeit werden sie auch in computergesteuerten Werkzeugmaschinen zur Positionierung der Werkzeuge verwendet. Durch die ständig sinkenden Kosten für die Ansteuerelektronik werden sie aber auch zunehmend im Konsumgüterbereich verwendet. So findet man in Kraftfahrzeugen der mittleren und gehobenen Kategorie heute bis über 50 Schrittmotoren im Einsatz, die Betätigung der vielen Klappen einer automatischen Heizungs- und Klimaanlage ist dafür ein Beispiel. Der nebenstehend abgebildete Doppel-Schrittmotor ist für den Einsatz in einem Kombiinstrument gedacht und kann zwei Zeiger auf einer Welle bedienen, wie Stunden- und Minutenzeiger auf einer Uhr. Der teilweise demonierte linke Motor wirkt auf die Hohlwelle aus Kunststoff, der rechte auf die Stahlwelle.
Schrittmotoren können bis ca. 1 kW wirtschaftlich eingesetzt werden.
Literatur
- Günter Springer: Fachkunde Elektrotechnik. 18.Auflage, Verlag Europa-Lehrmittel, Wuppertal, 1989, ISBN 3-8085-3018-9
- Gregor D. Häberle, Heinz O. Häberle: Transformatoren und Elektrische Maschinen in Anlagen der Energietechnik. 2. Auflage, Verlag Europa-Lehrmittel, Haan-Gruiten, 1990, ISBN 3-8085-5002-3
- Gerd Fehmel, Horst Flachmann, Otto Mai: Die Meisterprüfung Elektrische Maschinen. 12. Auflage, Vogel Buchverlag, Oldenburg und Würzburg, 2000, ISBN 3-8023-1795-5
Siehe auch
Weblinks

Wikimedia Foundation.