- Tauchendes Flugzeug
-
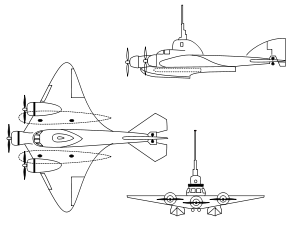 Sowjetischer Entwurf für ein fliegendes U-Boot
Sowjetischer Entwurf für ein fliegendes U-BootDas Fliegende U-Boot ist eine Kombination aus Wasserflugzeug und Unterseeboot, das man alternativ auch als Tauchendes Flugzeug bezeichnen kann. Dieses Fluggerät soll wie ein Flugzeug fliegen, auf dem Wasser landen, abtauchen und sich unter Wasser wie ein U-Boot fortbewegen. Auch ein erneuter Start von der Wasseroberfläche aus ist vorgesehen.
Da sich die Anforderungen an den Entwurf eines U-Bootes fast diametral von den Anforderungen an eine effektive Flugzeugkonstruktion unterscheiden, werden meist nur mäßige technische Anforderungen an die Leistungsfähigkeit als Flugzeug bzw. als U-Boot gestellt.
Inhaltsverzeichnis
Sowjetunion
Parameter Wert Besatzungsmitglieder 3 Abflugmasse 15.000 kg Fluggeschwindigkeit 100 kt (ca. 185 km/h) Reichweite 800 km Dienstgipfelhöhe 2.500 m Triebwerke 3× AM-34 Leistung im Flugbetrieb 3x 1.200 PS Maximale Windgeschwindigkeit
beim Start4-5 Bft Unterwassergeschwindigkeit 2-3 kt Maximale Tauchtiefe 45 m Reichweit in Tauchfahrt 5-6 NM Maximale Tauchdauer 48 Stunden Leistung der Unterwasserschraube 10 PS Dauer des Abtauchens 1,5 Min. Dauer des Auftauchens 1,8 Min. Bewaffnung 2 18-Zoll Torpedos;
2 MaschinengewehreMitte der 30er Jahre begann die Sowjetunion mit dem Bau einer starken Flotte. Es wurden Schlachtschiffe, Flugzeugträger und Schiffe anderer Schiffsklassen gebaut. Das regte auch Überlegungen zu neuen technischen und taktischen Lösungen an, man wurde gegenüber entsprechenden Vorschlägen aufgeschlossener.
In der Sowjetunion gab es aus der Zeit des Zweiten Weltkrieges einen Entwurf für ein fliegendes U-Boot, dessen Konstruktion jedoch nie über das Entwurfsstadium hinauskam. Das in den 1930er Jahren in der Sowjetunion begonnene Projekt zum Bau eines fliegenden U-Bootes wurde nie realisiert. Das geheime Projekt für das fliegende U-Boot (russ. Летающая Подводная Лодка, Abkürzung: ЛПЛ; Transkription: Letajuschtaja Podwodnaja Lodka; LPD), ein dreimotoriges Propellerflugzeug mit zwei Schwimmern und einem Periskop, wurde 1934 bis 1938 von Boris M. Uschakow (russ. Борис П. Ушаков) geleitet.
Noch während seines Studiums an der Marine-Ingenieurhochschule Dserschinski in Leningrad (russ. Высшее военно-морское инженерное училище), das er 1937 abschloss, stellte der Student Boris Uschakow 1934 den Entwurf für ein Projekt vor, bei dem die Eigenschaften eines Flugzeuges und eines U-Bootes vereinigt werden sollten - sein fliegendes U-Boot. Genaugenommen handelte es sich bei diesem Entwurf um ein Wasserflugzeug, das tauchen konnte.
Das Projekt wurde in den Folgejahren überarbeitet und in mehreren Varianten vorgestellt, um danach die Belastbarkeit und Haltbarkeit der einzelnen Konstruktionselemente zu testen. Im April 1936 stellt der Gutachter fest, dass Uschakows Idee interessant ist und realisiert werden sollte. Im Juli 1936 wurde das Entwurfprojekt "Fliegendes U-Boot" vom Wissenschaftlichen Forschungskomitee der Armee (russ. Научно-исследовательский военный комитет; Abk.: НИВК) geprüft und positiv bewertet. Das Komitee empfahl das Projekt fortzusetzen, um seine Realisierbarkeit mittels entsprechender Berechnungen und Laborversuche zu überprüfen.
Das Projekt wurde 1937 mit in den Plan "W" (russ. "В") des Komitees aufgenommen. Jedoch wurde das Projekt dann nach einer erneuten Überprüfung aufgegeben. Uschakow, zu jener Zeit "Militärtechniker 1. Ranges" in der Abteilung "W" des Komitees, führte das Projekt in seiner Freizeit fort.
Im Januar 1938 wurde der Entwurf und die grundlegenden taktisch-technischen Elemente von Uschakows fliegendem U-Boot von der 2. Abteilung des Komitees erneut begutachtet. [1]
Dieses fliegende U-Boot sollte in Ganzmetallbauweise gebaut werden, eine projektierte Fluggeschwindigkeit von 100 kt haben und sich mit 3 kt unter Wasser fortbewegen. Die Triebwerke sollten bei der Unterwasserfahrt durch Metallplatten verschlossen werden.
Das fliegende U-Boot sollte im Rumpf und in den Tragflächen sechs hermetisch abgeschlossene Kammern haben: drei Kammern, in denen je eines der drei Triebwerke (АМ-34; 1000 PS; mit Turbokompressor beim Start 1200 PS) beim Tauchen hermetisch abgedichtet wurde, sowie die hermetisch abgeschlossenen Pilotenkanzel, eine Kammer für die Akkumulator und eine Kammer für den Elektromotor. Alle übrigen Hohlräume im Flugzeug sollten sich beim Tauchen mit Wasser füllen. Die Vorbereitungszeit und das eigentliche Abtauchen sollte nur anderthalb Minuten dauern. Als Rumpf sollte ein genieteter Zylinder aus Duraluminium mit einem Durchmesser von 1,4 m und einer Wandstärke von 6 mm dienen. Das Cockpit sollte beim Tauchen geflutet werden, nachdem die Fluginstrumente in einem wasserdichten Schacht abgesenkt wurden. Die Besatzung sollte für die Unterwasserfahrt in den Steuerstand im Rumpf wechseln und von dort das U-Boot steuern.
Die Außenhaut der Tragflächen und des Leitwerkes sollte in Stahl ausgeführt werden, die Schwimmer aus Duraluminium. Diese Bauteile sollten sich beim Abtauchen mit Wasser füllen, so dass sie nicht für den erhöhten Wasserdruck in der Tauchtiefe ausgelegt werden mussten. Das Wasser sollte nach dem Öffnen entsprechender Ventile von alleine in diese Bauteile hineinströmen.
Die Behälter für Treibstoff und Schmieröl sollten in Gummireservoirs im Rumpf des fliegenden U-Bootes platziert werden.
Als Korrosionsschutz sollte das fliegende U-Boot mit entsprechenden Farben und Lacken behandelt werden.
Die zwei 18-Zoll-Torpedos sollten an speziellen Halterungen unter dem Flugzeugrumpf befestigt werden, die geplante Nutzlast sollte 44,5 % der Abflugmasse betragen. Das war für schwere Flugzeuge der damaligen Zeit ein typischer Wert.
Zum Auftauchen sollte der Wasserballast mit einer Pumpe aus den Hohlräumen gepumpt werden. Dafür sollte der Elektromotor für den Unterwasserantrieb verwendet werden.
Das fliegende U-Boot sollte auf offener See für Torpedoangriffe auf feindliche Schiffe eingesetzt werden. Es sollte aus der Luft das gegnerische Schiff orten und dessen Kurs aufklären. Danach sollte es außerhalb der Sichweite des Gegners landen und diesem in abgetauchtem Zustand auflauern und ihn dann mit Torpedos versenken.
Sowohl in der Luft als auch unter Wasser wurden keine großen Anforderungen an das fliegende U-Boot gestellt, da es in der Luft nur gegnerische Schiffe orten sollte und unter Wasser bereits an der erwarteten Schiffsroute lauern sollte. Falls das gegnerische Schiff nicht nah genug am fliegenden U-Boot vorbei fuhr, sollte auch ein erneuter Versuch möglich sein. Das fliegende U-Boot sollte also wieder auftauchen, nachdem das gegnerische Schiff wieder außer Sichtweite war, den Feind erneut auskundschaften und wieder außer Sichtweite an der richtigen Position in Lauerstellung gehen.
Eine weitere geplante Einsatzmöglichkeit war das Eindringen in Meeresgebiete und Marinebasen, die durch Minengürtel abgesperrt waren. Das fliegende U-Boot sollte diese Minengürtel auf dem Luftweg überwinden und dann im Schutz der Dunkelheit innerhalb eines feindlichen Sperrgebietes, einer Hafenbucht oder einer Marinebasis landen, abtauchen und als U-Boot agieren. Bei Tageslicht könnte es dann den Feind ausspionieren, geheime Fahrwasser auskundschaften und bei günstiger Gelegenheit angreifen.
Besonders vom Einsatz mehrerer fliegender U-Boote als Gruppe versprach man sich eine effektive Wirkung. So konnten drei fliegende U-Boote theoretisch einen 15 km langen Sperrgürtel bilden, um den voraussichtlichen Weg feindlicher Schiffe zu blockieren.
Das Projekt wurde 1938 vom Wissenschaftlichen Forschungskomitee der Armee (russ. Научно-исследовательский военный комитет; Abk.: НИВК) abgelehnt und für beendet erklärt.
Man versprach sich von dem Projekt eine negative Eigenschaft der U-Boote, deren geringe Beweglichkeit, auszugleichen. Besonders hoch wurde die Möglichkeit geschätzt, durch einen erneuten kurzen Flug zu einer neuen Lauerstellung den Angriffsversuch zu wiederholen, falls das feindliche Schiff nicht an der Position des lauernden U-Bootes vorbeifährt. Das wurde als einer der wesentlichen Vorteile des geplanten fliegenden U-Bootes angesehen.
USA
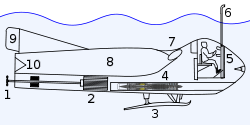 fliegendes Mini-U-Boot: Zeichnung zum Patent Nr. 2720367 von 1956
fliegendes Mini-U-Boot: Zeichnung zum Patent Nr. 2720367 von 1956 Cormorant
CormorantWährend des Kalten Krieges erwarteten die amerikanischen Planer extreme Schwierigkeiten für das eigene Eindringen mit einem konventionellen Wasserfahrzeug in die Ostsee, das Schwarze Meer oder das Asowsche Meer. Mit einem fliegenden U-Boot wollten sie dieses Ziel erreichen. Eventuell konnte damit sogar das Kaspische Meer erreicht werden. Da die Sowjets in diesen Gebieten keine feindlichen U-Boote erwarteten, ging man davon aus, dass es hier auch keine speziellen sowjetischen Vorkehrungen zur U-Jagd gäbe. Letztendliches Ziel war das Heranbringen von Mini-U-Booten an die sowjetischen Schiffe und die erfolgreiche Rückführung der U-Boot-Besatzung nach dem Angriff. Erfahrungen aus dem Zweiten Weltkrieg hatten gezeigt, dass japanische und italienische Mini-U-Boote erfolgreich eingesetzt wurden, die Besatzung danach aber nicht mehr aus dem Kampfgebiet evakuiert werden konnte.
Der amerikanische Erfinder Houston Harrington reichte 1945 ein Patent für eine Kombination aus Flugzeug und U-Boot ein.
1956 wurde das amerikanische Patent Nr. 2720367 für ein fliegendes Mini-U-Boot veröffentlicht. die Unterwasserfahrt sollte durch einen Elektromotor erfolgen. Start und Landung sollten auf einer Art ausfahrbaren Wasserskiern erfolgen. Der Antrieb für den Flug sollte durch zwei Düsentriebwerke erfolgen, die während der Unterwasserfahrt hermetisch abgedichtet wurden. Als Bewaffnung sollte ein Torpedo mitgeführt werden.
In den USA wird gegenwärtig durch die US Navy ein ähnliches Projekt, die Cormorant-Kampfdrohne, entwickelt - eine von U-Booten aus startende Drohne.
Reid Flying Submarine (RFS-1)
Donald V. Reid baute Anfang der 1960er Jahre ein ein Meter langes funktionsfähiges funkferngesteuertes Demonstrationsmodell eines fliegenden U-Bootes. 1964 erschien die Geschichte seines U-Boot-Flugmodells in einer populärwissenschaftlichen amerikanischen Zeitschrift. Dort wurde der Name "Triphibienfahrzeug" geprägt - in Anlehnung an Amphibienfahrzeug. Damit wurde sofort das Interesse der Militärs geweckt, die so ein Fahrzeug zum Abfangen von feindlichen U-Booten einsetzen wollten. Eine Designstudie für ein fliegendes U-Boot wurde 1964 in den USA an Convair and Electric Boat von General Dynamics vergeben. Als Ergebnis wurde die Durchführbarkeit des Projektes bestätigt.[2]
Die Anforderungen des Militärs an das fliegende U-Boot waren:
- Gewicht (ohne Pilot und Nutzlast): 500 kg,
- Nutzlast: 250-500 kg,
- Unterwassergeschwindigkeit: 10-20 Knoten,
- Fluggeschwindigkeit: 500-800 km/h,
- Reichweite
- unter Wasser: 80 km,
- in der Luft: 500-800 km,
- maximale Tauchtiefe: 25
- Flughöhe: 750 m,
- Start und Landung bis zu einer Wellenhöhe von 1 m.
Reid baute 1964 im Rahmen eines Rüstungsauftrages ("Defense contractor") der US Navy in Asbury Park, New Jersey den Prototyp des "Commander-1". Der "Commander-2" flog dann tatsächlich und war voll einsatzfähig. Der "Commander" war das erste amerikanische fliegende U-Boot. Der Prototyp steht heute im Mid-Atlantic Air Museum in Reading (Pennsylvania).
Er tauchte und fuhr in 2 m Tauchtiefe mit einer Geschwindigkeit von 4 Knoten. Die projektierte Fluggeschwindigkeit war 300 km/h, die erreichte Fluggeschwindigkeit 100 km/h. Der Erstflug erfolgte am 9. Juli 1964. Nach einer Tauchfahrt in 2 m Tiefe erfolgte ein kurzer Flug in 10 m Flughöhe. Um zu tauchen, wurden die Triebwerkseinlässe mit Gummi abgedichtet und der Propeller entfernt, und der Pilot legte ein Atemgerät an. Bei der Unterwasserfahrt sitzt der "Pilot" mit angelegtem Atemgerät in einer offenen Kabine.
Im Heck befand sich ein Elektromotor mit einem PS Leistung (736 W). Das Flugzeug hatte die Zulassungsnummer N1740. Es wurde von einem 65 PS Lycoming-Motor (4 Zylinder) angetrieben. Der "Commander" war 7 m lang, hatte Deltaflügel und bot Platz für einen Piloten. Die Treibstofftanks erfüllten auch die Funktion der Ballasttanks eines U-Bootes. Nach der Wasserlandung wurde der Treibstoff einfach ins Wasser gepumpt und dafür das schwerere Seewasser in die Treibstofftanks gepumpt. Eine erneute Betankung mit Treibstoff war nicht vorgesehen.
Aeroship
Auf der Grundlage von Raids "Commander" wurde das "Aeroship" gebaut. Ein zweisitziges subplane mit Strahltriebwerken. Die Landung auf dem Wasser erfolgte auf ausfahrbaren Kuven, die mit Wasserskiern vergleichbar sind. Bereits während der Landung wird das Turbojet-Triebwerk hermetisch abgeschottet (Lufteinlauf und Schubdüse). Die Treibstofftanks liegen in den Tragflächen. Das Aeroship hat eine Reichweite von 300 km, eine Fluggeschwindigkeit von 130 km/h und eine Unterwassergeschwindigkeit von 8 Knoten.
Auf der New Yorker Industrieausstellung wurde das Aeroship im August 1968 dem Publikum vorgeführt: Es landete auf dem Wasser, taucht ab und wieder auf und flog wieder davon.
Technische Probleme
Das fliegende U-Boot muss sich sowohl in der Luft, als auch im Wasser effektiv bewegen können. Die Dichte von Wasser ist 775 mal größer, als die Dichte von Luft.
Das größte technische Problem ist die Masse des fliegenden U-Bootes. Nach dem archimedischen Prinzip muss bei einem U-Boot für die Fahrt in einer konstanten Wassertiefe ein Gleichgewicht zwischen seinem Gewicht und seiner Wasserverdrängung (dem Gewicht des verdrängten Wassers) bestehen. Dagegen besteht bei einem Flugzeug die technische Anforderung so leicht wie möglich zu sein.
Damit das Flugzeug unter Wasser fahren kann, muss das Gewicht unter Wasser um ein Vielfaches des Flugzeuggewichts erhöht werden. Im Rumpf oder den Tragflächen müssen große Wassertanks eingebaut sein (ca. 30 % des Flugzeugvolumens), um das für das Tauchen erforderliche Ballastwasser aufzunehmen. Für dieses hohe Gewicht steht dann aber für die Unterwasserfahrt kein ausreichend starker Elektromotor und Akkumulator im fliegenden U-Boot zur Verfügung.
Ein weiteres großes technisches Problem ist der sehr große Widerstand der Tragflächen unter Wasser. Das erlaubt einem fliegenden U-Boot nur eine langsame Unterwasserfahrt. ansonsten müßten entweder die Tragflächen weggeklappt werden oder ein extrem starker Elektromotor eingesetzt werden.
Das nächste technische Problem ist der hohe Druck unter Wasser. Je 10 m Tauschtiefe steigt der Wasserdruck um ein Bar, zusätzlich herrscht an der Wasseroberfläche ein Druck von 1 bar. In 25 bzw. 50 m Tachtiefe herrscht ein Druck von 3,5 bar bzw. 6 bar. Das sind Größenordnungen, die in der Luftfahrt unbekannt sind und denen kein herkömmliches Flugzeug standhalten kann. Damit ein Fahrzeug in der Luft und im Wasser funktionieren kann braucht es ein gigantisches Gewicht.
(Anmerkung: für den Druck auf die Außenhülle ist der zusätzliche Druck, der zum gewohnten Luftdruck dazukommt, entscheidend. Da man im U-Boot schon ca. 1 bar Gegendruck hat, wirkt auf die Bootshülle entsprechend in 10 m Tiefe auch nur ca. 1 bar.)
Wenn das fliegende U-Boot nicht nur wie ein gewöhnliches Wasserflugzeug von der Wasseroberfläche starten soll, sondern direkt aus dem Wasser, dann erfordert der Start extrem starke Triebwerke, die es förmlich vom Wasser losreißen.
Wegen der Krafteinwirkungen während der Bewegung in der Luft bzw. im Wasser musste das fliegende U-Boot sowohl den Anforderungen der Aerodynamik, als auch der Hydrodynamik genügen. Es musste sozusagen die "Hydro-Aerodynamik" (oder "Aero-Hydrodynamik") berücksichtigt werden.
Weiterentwicklung
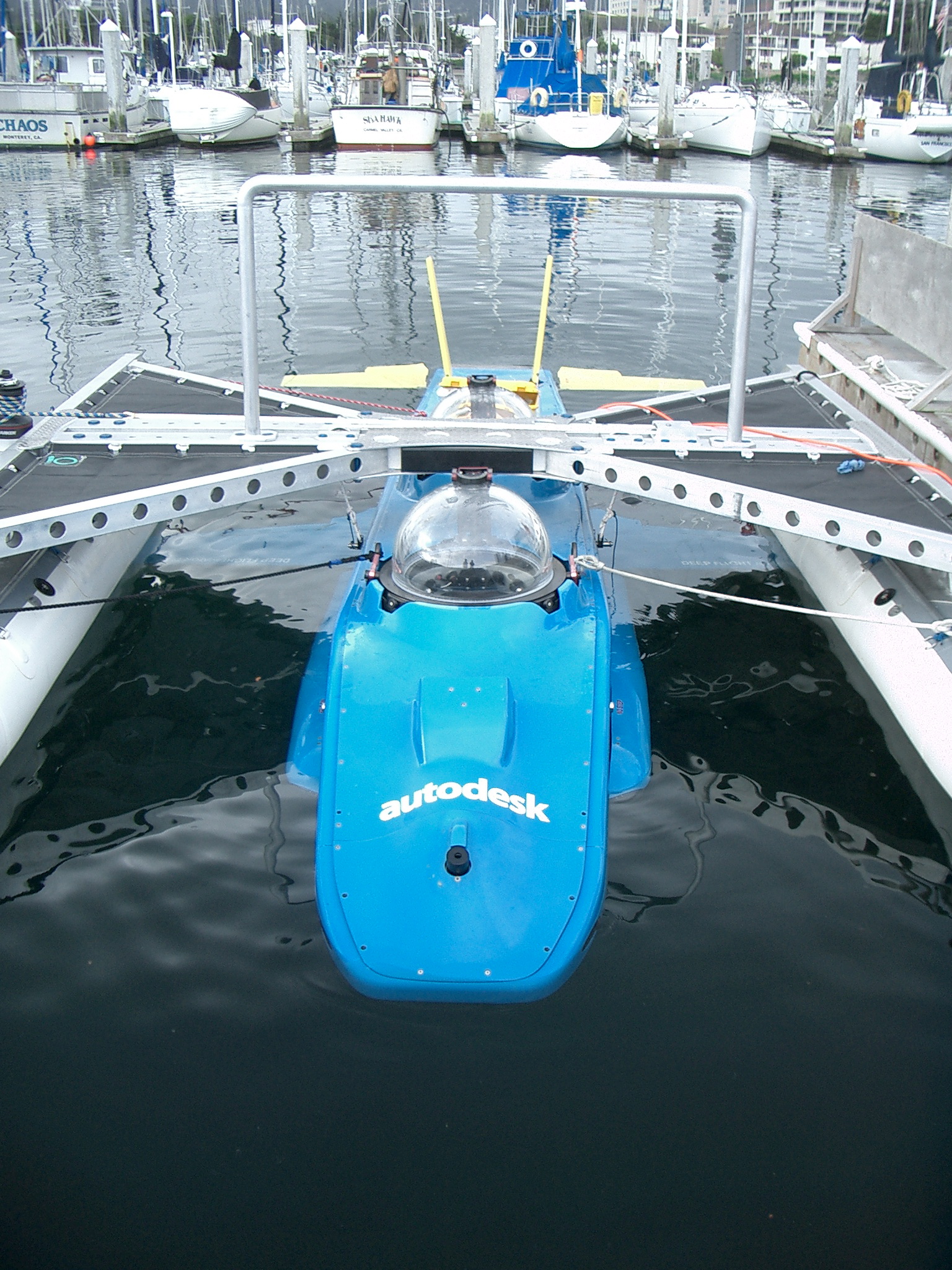
 Experimental-U-Boot in Monterey Bay
Experimental-U-Boot in Monterey BayDas fliegende U-Boot war der Versuch das Flugboot weiterzuentwickeln, endete aber schließlich in einer Sackgasse. Auch anderen unkonventionellen Ansätzen wie dem Ekranoplan oder dem Flugauto war kein Erfolg beschieden. Demgegenüber verlief die Entwicklung von Amphibienfahrzeugen erfolgreich.
Ein anderer technischer Lösungsansatz ist das Unterwasserflugzeug (oder auch Unterwasserflugapparat; engl. subplane ). Dabei handelt es sich um einen radikalen Neuentwurf des U-Bootes. Es ist gewissermaßen ein U-Boot, das wie ein Flugzeug unter Wasser "fliegt", statt wie ein konventionelles U-Boot Ballasttanks mitzuführen. Es ist leichter, als das verdrängte Wasser und hat im ruhigen Zustand die Tendenz aufzusteigen. Es hat Tragflächen, die einen negativen Auftrieb (also einen "Abtrieb") erzeugen - allerdings nur, so lange das Unterwasserflugzeug Fahrt macht. So ein Unterwasserflugzeug taucht nur langsam ab und erreicht nur eine geringe Tauchtiefe.
Das Bild zeigt ein Experimental-U-Boot in Monterey Bay, das nach dem Prinzip eines Unterwasserflugzueges funktioniert.
Fliegende U-Boote im Science-Fiction-Genre
Im Science-Fiction-Genre gibt es fliegende U-Boote beispielsweise im Computerspiel X-COM: Terror from the Deep, in der amerikanischen Fernsehserie Die Seaview - In geheimer Mission, in dem Film Sky Captain and the World of Tomorrow (tauchende Flugzeuge) oder im japanischen Film "Atragon" (1963).
U-Boot-gestützte Flugzeuge
Hauptartikel: U-Boot-Flugzeugträger
Ein alternativer Lösungsansatz zum fliegenden U-Boot war der Einsatz von Flugzeugen, die von U-Booten aus gestartet werden sollten. Ein weiterer alternativer Lösungsansatz ist das Abwerfen oder Absetzen von Mini-U-Booten von Flugzeugen aus.
Einzelnachweise
- ↑ http://www.moravia.ru/arch_storyes/id/15/
- ↑ "Proposed Study of a Flying Submersible ASW Vehicle," General Dynamics/Convair report HP-62-016, from 1962.
Quellen
- Геннадий Петров (Genadij Petrow): Летающая подводная лодка. (Das Fliegende U-Boot) In: Вестник Воздушного Флота. (Zeitschrift der Luftflotte) Nr. 3 (Jan./Feb.), 1995, Seite 52-53, ISSN 0373-9821.
Literatur
Bruce Reid: The Flying Submarine: The Story of the Invention of the Reid Flying Submarine, RFS-1. Heritage Books, Inc., 2004, ISBN 0-7884-3136-6
Weblinks
- The U.S. Navy and Flying Submarines (engl.)
- Flying Submarines (engl.)
- Zeichnung eines fliegenden U-Bootes (russ. Beschriftung; nicht von 1938, da ein Strahlflugzeug dargestellt ist)



Wikimedia Foundation.