- Tellegen'sches Theorem
-
Tellegens Theorem (entwickelt von B. D. H. Tellegen) wird vor allem in der digitalen Signalverarbeitung für den Entwurf von Filtern eingesetzt. In seiner Reinform handelt es sich bei dem Theorem um eine Art Erhaltungssatz, es lassen sich aus ihm jedoch mehrere Beziehungen zwischen Signalflussgraphen ableiten.
Inhaltsverzeichnis
Das Theorem
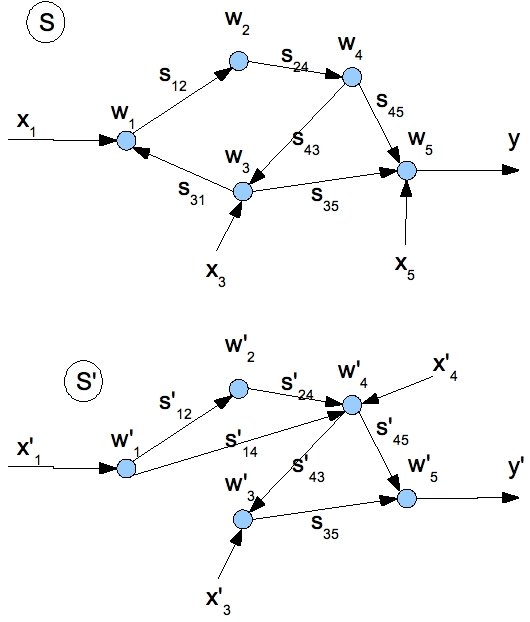
 Zwei Systeme S und S', die mit dem Tellegen Theorem verglichen werden können
Zwei Systeme S und S', die mit dem Tellegen Theorem verglichen werden könnenEs sind zwei Systeme S und S', die durch Signalflussgraphen beschrieben werden, gegeben. Diese müssen zunächst nicht unbedingt linear sein, haben aber dieselbe Anzahl von Knoten, nämlich N. Die Knotensignale werden mit wk, bzw. w'k, die Signale der Pfade zwischen Knoten i und j mit sij bzw. s'ij und die Eingangssignale mit xk bzw. x'k bezeichnet. Das Tellegen'sche Theorem besagt dann:

Die linke Summe enthält nur „interne“ Vorgänge, während die rechte Summe nur die Eingangssignale behandelt. Aus dieser Form lässt sich noch keine Aussage ableiten, es müssen konkrete Fälle betrachtet werden.
Herleitung
Wir betrachten zunächst nur die Knotensignale in der vorerst sinnlos und trivial erscheinenden Identität
Für die Knotensignale lässt sich einsetzen:
 bzw.
bzw.
Einsetzen und Aufteilen der Summe führt genau auf obige Form.
LTI Fall
Sind die Übertragungsfunktionen der Pfade in beiden Systemen linear und zeitinvariant, dann lässt sich das Theorem auf eine einfachere Form umschreiben. Es werden zunächst die Zeitsignale durch ihre z-Transformierten ersetzt. Jedes Pfadsignal ist nun als Signal des Stammknotens multipliziert mit der Übertragungsfunktion des Pfades Fij darstellbar.
![w_k[n] \rightarrow W_k(z)](/pictures/dewiki/48/08ec6e852c79a122b69252f783df7ed3.png)
![x_k[n] \rightarrow X_k(z)](/pictures/dewiki/97/a02a36ea54f3529b5f40145f051ff81a.png)
![s_{ij}[n] \rightarrow W_i(z).F_{ij}(z)](/pictures/dewiki/51/34b0612b6ec227526a324134bf33557e.png)
Das Theorem kann nun umgeschrieben werden zu

Hieraus können nun relativ einfach Zusammenhänge zwischen den Systemen abgeleitet werden.
Transposition
Ist das zu vergleichende System S' das zu S transponierte System ST, und haben die Systeme nur jeweils einen Eingang und einen Ausgang, dann haben sie die gleiche Übertragungsfunktion. Dies soll nun mittels des Tellegen Theorems für lineare Systeme bewiesen werden.
Das transponierte System entsteht aus S, indem die Eingangs- zu den Ausgangsknoten werden und umgekehrt. Außerdem werden alle Pfade (bei gleichbleibender Pfadübertragungsfunktion) umgedreht, d. h.
 .
.Einsetzen dieser Bedingung in das Theorem
 lässt die linke Summe wegfallen und es bleibt
lässt die linke Summe wegfallen und es bleibt
stehen. Es wird nun weiter angenommen, dass das System S einen Eingangsknoten (wa) und einen Ausgangsknoten (wb) besitzt. Das Transponierte System hat dann den Eingangsknoten bei
 und den Ausgangsknoten bei
und den Ausgangsknoten bei  . Die verbliebene Summe reduziert sich dann auf
. Die verbliebene Summe reduziert sich dann auf
Da
 ist folgt
ist folgt
Was nichts anderes heißt, als dass die Ausgangssignale bei gleichem Eingangssignal übereinstimmen, die Übertragungsfunktion ist also gleich.
Empfindlichkeitsanalyse
Es soll wieder ein lineares System S betrachtet werden, das nur ein Eingangs- und ein Ausgangssignal besitzt (kann mit derselben Argumentation auf beliebig viele Ein- und Ausgänge verallgemeinert werden). Es soll nun untersucht werden, wie sich die Übertragungsfunktion H(z) von S ändert, wenn genau ein Pfad - z. B. der zwischen Knoten h und l - geändert wird.
Es entsteht also ein neues System

Auch die anderen Systemkomponenten werden in das neue System überführt
 ;
;  ;
;  ;
; 
Dieses System wird nun über Tellegens Theorem mit dem transponierten Ausgangssystem ST verglichen.

In der linken Summe sind dann wieder alle Summanden Null, außer der für j=h und k=l. Durch die Voraussetzung eines Eingangssignals (Knoten a) und eines Ausgangssignals (Knoten b) lässt sich auch die rechte Summe wieder reduzieren.

Da
 und
und  lässt sich der Ausdruck weiter vereinfachen auf
lässt sich der Ausdruck weiter vereinfachen auf
Wobei nun
 und
und  ist.
ist.Auch die Knotensignale können durch (interne) Übertragungsfunktionen mit dem Eingangssignal in Verbindung gebracht werden. So wird
 und
und 
Durch Umformung erhält man dann

Die einzig verbliebene Unbekannte in dieser Gleichung ist
 . Sie kann mit genau dieser Gleichung berechnet werden, indem anstatt b der Knoten h als Ausgangsknoten verwendet wird.
. Sie kann mit genau dieser Gleichung berechnet werden, indem anstatt b der Knoten h als Ausgangsknoten verwendet wird. .
.Dies lässt sich umformen zu
 .
.Durch Rückeinsetzen ergibt sich dann die Gleichung
 ,
,die nur noch Funktionen aus dem Ursprungssystem enthält.
Literatur
- Alan V. Oppenheim, Ronald W. Schafer: Digital Signal Processing. Prentice-Hall, 1975, ISBN 0-13-214635-5.
Wikimedia Foundation.