- Transvektion
-
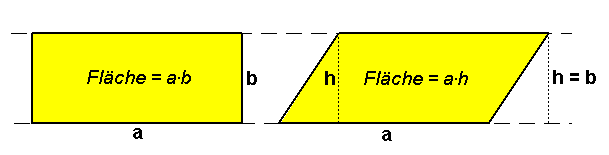
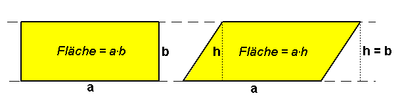 Eine Scherung bildet ein Rechteck auf ein Parallelogramm ab
Eine Scherung bildet ein Rechteck auf ein Parallelogramm abUnter einer Scherung oder auch Transvektion versteht man ursprünglich in der Geometrie der Ebene bestimmte affine Abbildungen der Ebene auf sich selbst, bei denen der Flächeninhalt erhalten bleibt. Bei einer Scherung bleibt eine Gerade der Ebene (die Fixpunktgerade oder Achse der Scherung) fix, das heißt, jeder Punkt dieser Geraden wird auf sich abgebildet. Alle anderen Punkte der Ebene werden parallel zur Achse verschoben, dabei ist die Länge des Verschiebungsvektors eines Punktes proportional zum Abstand dieses Punktes von der Achse. Alle Geraden, die parallel zur Achse sind, werden auf sich abgebildet, sind also Fixgeraden. Strecken auf diesen Geraden werden längentreu abgebildet.
Bei einer Scherung bleibt also der Abstand jedes Punktes zur Achse unverändert. Damit werden Rechtecke und Dreiecke, bei denen eine Seite parallel zur Achse ist, auf Parallelogramme bzw. Dreiecke abgebildet, die (auf diese Seite) eine gleich lange Höhe haben (vgl. die Abbildung).
Inhaltsverzeichnis
Scherungen in der Ebene
Eine Affinität σ eines zweidimensionalen affinen Raumes E (der "Ebene") ist genau dann eine Scherung, wenn
- (1) es zwei verschieden Fixpunkte F1 und F2 gibt, formal:
-
- (2) und ein beliebiger Punkt P, der nicht auf der Verbindungsgeraden a der zwei Fixpunkte aus (1) liegt, unter σ Fixpunkt ist oder parallel zu a verschoben wird. formal:
-
 .
.
-
Aus der Bedingung (1) folgt mit den Eigenschaften einer Affinität, dass die Verbindungsgerade der beiden Fixpunkte eine Fixpunktgerade (Achse a) ist. Bedingung (2) lässt (mit der Möglichkeit eines dritten Fixpunktes außerhalb von a) auch die identische Abbildung als Scherung zu oder erzwingt, dass mit einem Punkt außerhalb der Fixpunktgeraden alle Punkte außerhalb von a parallel zu a verschoben werden.
Allgemein ist eine Affinität in der Ebene eindeutig bestimmt, wenn zu drei Punkten, die nicht auf einer Geraden liegen, jeweils die nicht auf einer Geraden liegenden Bildpunkte angegeben werden.
Eigenschaften
Bemerkenswert ist, dass zur Charakterisierung einer Scherung keine Abstands- oder Flächeninhaltsbegriffe benutzt werden müssen. Scherungen lassen sich so in jeder affinen Ebene definieren. Die in der Einleitung genannten Eigenschaften sind dann so präzisieren:
Ist in der Ebene ein euklidischer Abstand und ein mit diesem Abstand verträglicher Flächeninhalt definiert, dann bleiben bei einer Scherung mit Achse a
- - der Abstand zwischen zwei Punkten, die auf a oder Parallelen zu a liegen,
- - der Abstand zwischen zwei zu a parallelen Geraden
- - der (orientierte) Flächeninhalt jeder meßbaren Fläche
erhalten.
In der reellen Ebene kann man durch Wahl einer "Einheitsellipse" oder gleichwertig durch Wahl eines affinen Koordinatensystems als Orthonormalbasis unterschiedliche Euklidische Strukturen, d. h. unterschiedliche Winkel- und Abstandsbegriffe einführen. Eine Scherung hat nun die genannten Eigenschaften in Bezug auf jede dieser Strukturen, während zum Beispiel eine Drehung bezüglich einer euklidischen Struktur bezüglich einer anderen keine Drehung zu sein braucht. Diese Unabhängigkeit von der euklidischen Struktur teilen die Scherungen mit den Parallelverschiebungen.
Bildkonstruktion
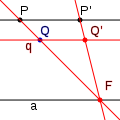 Konstruktion eines Bildpunktes Q' von Q unter einer Scherung, bei der die Achse a und ein Punkt P samt Bildpunkt P' außerhalb der Achse gegeben sind.
Konstruktion eines Bildpunktes Q' von Q unter einer Scherung, bei der die Achse a und ein Punkt P samt Bildpunkt P' außerhalb der Achse gegeben sind.Eine Scherung in der Ebene ist festgelegt, wenn ihre Achse a und für einen gegebenen Punkt P außerhalb der Achse sein Bildpunkt P' gegeben ist. Dann kann das Bild eines weiteren Punktes Q, der nicht auf der Achse und nicht auf der Verbindungsgeraden PP' liegt, folgendermaßen konstruiert werden, die Abbildung rechts zeigt die Schritte (rot) der Konstruktion:
-
- Konstruiere die Parallele q zu a durch Q.
- Zeichne die Verbindungsgerade PQ. Sie schneidet die Achse a in einem Fixpunkt F.
- Zeichne die Verbindungsgerade FP'. Sie ist das Bild der Gerade PQ. Daher ist der Schnittpunkt Q' von FP' mit q der gesuchte Bildpunkt.
Wenn der abzubildende Punkt Q auf der Achse liegt, ist er selbst Fixpunkt. Liegt er auf der Verbindungsgeraden PP', dann muss entweder nach obigem Konstruktionstext zuerst für einen Hilfspunkt H außerhalb von PP' und der Achse der Bildpunkt bestimmt werden, oder man verwendet für die Bildkonstruktion die Tatsache, dass die Scherung auf PP' als Verschiebung operiert.
Matrixdarstellung
Wählt man in der Ebene ein kartesisches Koordinatensystem, bei dem die x-Achse mit der Achse der Scherung zusammenfällt, dann wird diese Scherung durch die lineare Abbildung
 mit der Abbildungsmatrix
mit der Abbildungsmatrix 
dargestellt.
Ist eine affine Abbildung α der Ebene durch ihre Abbildungsmatrix M und ihre Verschiebung
 gegeben,
gegeben,  , dann ist α genau dann eine Scherung, wenn
, dann ist α genau dann eine Scherung, wenn-
- die Fixpunktgleichung
 eine Lösung
eine Lösung  hat
hat - und die Matrix M das charakteristische Polynom χM(X) = (X − 1)2 hat. Das ist hier die Determinante
 .
.
- die Fixpunktgleichung
Für algebraische Untersuchungen ist es bequem, die betrachteten affinen Abbildungen als 3x3-Matrizen (erweiterte Abbildungsmatrizen) bezüglich einer festen Basis darzustellen. Das entspricht einer Darstellung der affinen Abbildung in homogenen Koordinaten:
- Statt
 schreibt man dann
schreibt man dann 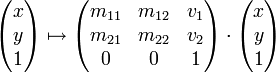 .
.
Algebraische Struktur
Die Verkettung zweier Scherungen ist im allgemeinen keine Scherung mehr. Die Menge aller Scherungen der Ebene bildet also insbesondere keine Gruppe. Ihre erweiterten Abbildungsmatrizen sind eine Teilmenge der Gruppe der Verschiebungsmatrizen in der Speziellen linearen Gruppe
 . Das ist eine Gruppe. (Sie besteht aus den Matrizen der Form
. Das ist eine Gruppe. (Sie besteht aus den Matrizen der Form 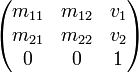 , deren Determinante 1 ist. Genau die erweiterten Abbildungsmatrizen flächentreuer und orientierungserhaltender Affinitäten bilden diese Gruppe.)
, deren Determinante 1 ist. Genau die erweiterten Abbildungsmatrizen flächentreuer und orientierungserhaltender Affinitäten bilden diese Gruppe.)Die Menge der Scherungen mit einer gemeinsamen Achse bildet eine abelsche Gruppe. Sie ist isomorph zur Gruppe der Verschiebungen in eine feste Richtung, denn man kann ein affines bzw. kartesisches Koordinatensystem wählen (mit der gemeinsamen Achse als x-Achse), in der sie alle eine Darstellung der Form
 haben. Beachte dazu, dass es auf die Lage des Ursprungs auf der Achse für die Darstellung der Scherung nicht ankommt.
haben. Beachte dazu, dass es auf die Lage des Ursprungs auf der Achse für die Darstellung der Scherung nicht ankommt.Für Scherungen, deren Achsen parallel sind, kann man ein gemeinsames affines bzw. kartesisches Koordinatensystem wählen, in dem ihre erweiterten Abbildungsmatrizen die Form
 haben. (Der Verschiebungsanteil v2 muss verschwinden, da sonst die Fixpunktgleichung keine Lösung hat.) Multipliziert man zwei dieser erweiterten Matrizen, so kommt:
haben. (Der Verschiebungsanteil v2 muss verschwinden, da sonst die Fixpunktgleichung keine Lösung hat.) Multipliziert man zwei dieser erweiterten Matrizen, so kommt: .
.
Daraus wird offensichtlich:
-
- Die Verkettung zweier Scherungen mit parallelen Achsen ist wieder eine Scherung mit einer Achse, die parallel zu den ursprünglichen Achsen ist.
- Die Menge der Scherungen mit Achsen in einer festen Richtung bildet eine abelsche Gruppe.
- Die Gruppe wird erzeugt von der Gruppe der Scherungen mit einer festen Achse (aus der Parallelenschar) und der Gruppe der Verschiebungen parallel zu dieser Achse. Sie ist sogar das direkte Produkt dieser Gruppen.
- Die Gruppe ist isomorph zur Gruppe der Parallelverschiebungen der Ebene (also letztlich zum zweidimensionalen Vektorraum über dem Grundkörper als abelsche Gruppe).
Scherungen in höherdimensionalen Räumen
In einem n-dimensionalen Raum ist eine Scherung eine Affinität, die eine Fixpunkthyperebene hat und durch die alle nicht auf dieser Hyperebene liegenden Punkte in eine feste Richtung parallel zur Fixpunkthyperebene verschoben werden. Die Länge eines Verschiebungsvektors ist dabei wieder proportional zum Abstand von der Fixpunkthyperebene.
Die Verallgemeinerung auf höherdimensionale Räume ist aber in der Literatur nicht einheitlich. Als Scherung des n-dimensionalen Raumes wird auch allgemeiner jede Affinität verstanden, die eine Matrixdarstellung
zuläßt (bei Wahl einer geeigneten Basis). Dabei sind I1,I2 Einheitsmatrizen und M ist eine beliebige Matrix. Bei einer solchen Scherung ist der fixierte Raum ein linearer Raum der Dimension
 (s. Rang (Mathematik)) und Punkte außerhalb dieses Raumes werden parallel zu diesem Raum verschoben.
(s. Rang (Mathematik)) und Punkte außerhalb dieses Raumes werden parallel zu diesem Raum verschoben.Zusammenhang mit dem Begriff Scherung in der Mechanik
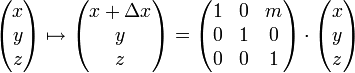
In der Mechanik, speziell der Kontinuumsmechanik bezeichnet man als Scherung bestimmte Verformungen eines dreidimensionalen Körpers. Dabei werden Massenelemente des Körpers in eine gemeinsame Richtung parallel zu einer festen Ebene im Körper verschoben und die Länge des Verschiebungsvektors ist proportional zum Abstand des Massenelementes von der festen (Fixpunkt-)Ebene. Der Begriff deckt sich also (als Abbildung) mit der spezielleren Verallgemeinerung auf drei Dimensionen aus dem vorigen Abschnitt. Wählt man das Koordinatensystem so, dass die unverschobene Ebene die xy-Ebene des kartesischen Koordinatensystems bildet und alle Verschiebungen parallel zur x-Achse erfolgen, dann lässt sich die dreidimensionale Scherung durch die lineare Abbildung
beschreiben. Dabei ist
 die Verschiebung eines Massenelementes im Abstand z von der Fixpunktebene. Ausgeführt wird dies im Hauptartikel Scherung (Mechanik).
die Verschiebung eines Massenelementes im Abstand z von der Fixpunktebene. Ausgeführt wird dies im Hauptartikel Scherung (Mechanik).Literatur
- Schupp, H.: Elementargeometrie, UTB Schöningh (1977),ISBN 3-506-99189-2, S.150
- Schaal, Hermann: Lineare Algebra und analytische Geometrie. - 3 Bände 2. Aufl. Braunschweig, Vieweg (1980) ISBN 3129228217, ISBN 3528130571, ISBN 3-528-13058-X
Weblinks
- (1) es zwei verschieden Fixpunkte F1 und F2 gibt, formal:



Wikimedia Foundation.