- A/P
-
Ein Autopilot (A/P, auch „Steuerungsautomat“) ist eine automatische Steuerungsanlage in Flugzeugen, aber auch in Wasserfahrzeugen. Ebenso ermöglicht er die selbsttätige Steuerung von unbemannten Luftfahrzeugen (UAV), Raketen oder Satelliten.
Autopiloten sind computergesteuerte Mess- und Regelsysteme zur Stabilisierung des Fluges und zu seiner planmäßigen Navigation. Bei größeren Flugzeugen im Linien- und Charterflug greift der Autopilot dabei auf den digitalen Flugplan zurück, der im Flight Management System (FMS) gespeichert ist.
 Bild 1: Autopilot älterer Bauart in einer PA 24 Comanche
Bild 1: Autopilot älterer Bauart in einer PA 24 ComancheEinsatz
Nicht alle Flugzeuge haben Autopiloten. Ohne Autopiloten fliegen meist ältere und kleinere Flugzeuge der Allgemeinen Luftfahrt. Auch kleine Verkehrsflugzeuge mit weniger als 20 Sitzen dürfen ohne Autopiloten ausgerüstet sein, da sie von zwei Piloten und meist nur für Kurzstrecken geflogen werden. Für Verkehrsflugzeuge mit über 20 Sitzen schreiben die internationalen Luftfahrtbestimmungen einen Autopiloten vor.
Kleinflugzeuge für den Sichtflug sind meist nicht mit einem Autopiloten ausgerüstet. In heutigen Verkehrsflugzeugen ist immer ein Autopilot vorhanden. Er ist in Linienmaschinen während der meisten Zeit aktiviert – über 95 % der Flugzeit. Im Airbus, der fly-by-wire gesteuert wird, lässt sich gar nicht mehr exakt trennen, ob der Autopilot oder der Pilot fliegt.
Der Autopilot führt ein Fahrzeug (Luftfahrzeug, Rakete, Wasserfahrzeug, Landfahrzeug) auf einer vorgegebenen Route. Autopiloten werden meistens in Flugapparaten eingesetzt, da der Flug meist in einem Raum erfolgt, in dem nur wenig Hindernisse liegen. Somit muss der Autopilot nur die Aufgabe der eigentlichen Navigation leisten. Er kümmert sich nicht darum den (selten auftretenden) Hindernissen auf seinem Kurs auszuweichen.
Auch beim Einsatz von Autopiloten für den Schienenverkehr tritt das Problem, einem Hindernis auszuweichen, in den Hintergrund.
Der erste Flug eines Flugzeuges, das durch einen Autopiloten der Firma Sperry (USA) gesteuert wurde, fand 1914 auf der Weltausstellung in Paris statt. Anfangs wurde der Autopilot nur für die Stabilisierung des Flugzeuges verwendet, indem die Drehbewegungen um die drei Raumachsen des Flugzeuges kontrolliert und korrigiert wurden. So konnte ohne Eingreifen des Piloten die Fluglage beibehalten werden. Mit der Vervollkommnung des Autopiloten konnte dieser dann auch für die Navigation und Flugsteuerung während allen Phasen des Fluges (vom Start bis zur Landung) verwendet werden. Solche Autopiloten kontrollieren die Steuerflächen (Ruder) und die Triebwerke.
Die einzelnen Steuerparameter (Kurs, Höhe, Querneigung usw.) werden jeweils von einem oder mehreren Sensoren gemessen. Die Signalverarbeitung erfolgt in einem Computer, der den Ist-Wert mit dem Soll-Wert vergleicht und bei Abweichungen nach sehr komplexen Regeln steuernd eingreift und Servos aktiviert, die auf die Ruder wirken.
Obwohl mit den technischen Möglichkeiten heutiger Autopiloten ein automatischer Start möglich wäre, wird er vom Piloten ausgeführt, da insbesondere für einen Startabbruch komplexe Entscheidungen des Piloten erforderlich sind. Deshalb sind Autopiloten in heutigen Verkehrsflugzeugen so konstruiert, dass sie sich erst in einer bestimmten Höhe über Grund aktivieren lassen. Meistens werden sie ausschließlich im Reiseflug aktiviert. Auch Sinkflug und Landeanflug steuern Piloten selber.
Klassifizierung
Es wird unterschieden zwischen
- Einachsigen Autopilot,
- Zweiachsigen Autopilot (mit oder ohne Höhenvorwahl) und
- Dreiachsigen Autopilot.
In modernen Verkehrsflugzeugen ist der Autopilot ein Bestandteil des Flight Management Systems (FMS). Das FMS wird über das Mode Control Panel (MCP) und die Control Display Unit (CDU) bedient. Hauptsteuereinheit des FMS ist der Flight Management Computer (FMC). Das MCP liegt zentral im Cockpit unterhalb der Windschutzscheibe zwischen beiden Piloten. Die CDU ist meist in 2–3facher Ausführung vorhanden, sie liegen auf der Mittelkonsole zwischen beiden Piloten. Der FMC ist meist in der Electronic bay gelegen, dem Computerraum unterhalb des Cockpits. Zum FMS gehört auch die automatische Schubregelung und der Flight Director.
Modellvielfalt
Es gibt nicht „den einen“ Autopiloten, sondern eine Vielzahl von verschiedenen Autopiloten von verschiedenen Herstellern. Auf Grund der zunehmenden Rechenleistung statten die Hersteller ihre Autopiloten mit immer neuen Merkmalen und Fähigkeiten aus, so dass sie sich in den letzten Jahrzehnten deutlich weiterentwickelt haben. Alte Flugzeuge können mit einem neuen Autopiloten nachgerüstet werden.
Vorteile des Autopiloten
Der Autopilot dient der Entlastung des Piloten, damit er sich kurzfristig auf andere Aufgaben konzentrieren kann, wie Funk, Navigation, Treibstoffberechnung, Nachschlagen im Pilotenhandbuch bei Abweichungen vom Normalbetrieb u. a. Der Autopilot entlastet den Piloten von stundenlanger, monotoner, ermüdender Arbeit der Steuerung um die drei Achsen mit den drei Rudern (Seitenruder, Querruder, Höhenruder). Er eliminiert somit menschliche Fehlerquellen.
Da der Instrumentenflug vom Piloten ununterbrochenen höchste Konzentration und entsprechende korrigierende Steuermanöver verlangt, „eliminiert“ der Autopilot besonders bei längerem Instrumentenflug unter realen Instrumentenwetterbedingungen (IMC, engl. instrument meteorological conditions) die Fehlerquelle Mensch.
Ein gut funktionierender Autopilot übersteuert nicht bei seinen Korrekturen und kann deshalb meist auch wirtschaftlicher fliegen als ein menschlicher Pilot.
Nachteile des Autopiloten
Ein Autopilot bringt zusätzliche Komplexität für die Konstruktion des Flugzeuges mit sich. Der Pilot muss lernen ihn richtig zu bedienen. Es gab gefährliche Zwischenfälle infolge von Bedienfehlern des Piloten.
Zwischenfall über Moskau
Ein Airbus A310-304 der Interflug (D-AOAC) mit 109 Insassen befand sich am 11. Februar 1991 im Landeanflug auf den Flughafen Moskau-Scheremetjewo, als er vom Autopiloten in eine sehr gefährliche Situation gebracht wurde. Die Flugsicherung wies den Piloten wegen einer blockierten Landebahn ein Durchstarten an, als das Flugzeug gerade unter 470 Meter über Grund sank. Die Besatzung gab die Anweisung zum Durchstarten in ihr Flug-Kontroll-System ein. Das Durchstartmanöver wurde dann automatisch eingeleitet.
Der einsetzende Steigflug verlief in den Augen des Piloten allerdings zu steil, weshalb er den Autopiloten deaktivierte und versuchte eine gemäßigtere Flugbahn zu erreichen. Allerdings bemerkte der Pilot nicht, dass der Autopilot nach wie vor eingeschaltet war. Der nun für den Autopiloten zu flachen Flugbahn begegnete das System mit einer steileren Anstellung der Trimmfläche, während der Pilot erneut Steuereingaben gegen den Steigflug gab – Pilot und Autopilot kämpften also gegeneinander.
Der Autopilot besaß jedoch größere Wirkung auf die Steuerflächen, weshalb sich das Flugzeug mit der Zeit beinahe senkrecht aufstellte und in einer Höhe von etwa 1300 m aufgrund zu geringer Geschwindigkeit durchsackte. Es stürzte 900 m, bevor es abgefangen werden konnte. Danach stieg das Flugzeug wieder um 1300 m, um anschließend wieder durchzusacken. Dieser Zyklus wiederholte sich insgesamt vier Mal. Erst nach der Reduzierung der Triebwerksleistung gelang es der Crew wieder, das Flugzeug unter Kontrolle zu bringen und sicher zu landen.
Fehlerursache war die falsche Ansicht der Airbus-Ingenieure, dass ein Pilot immer den Autopiloten deaktivieren würde bevor er selbst das Steuer in die Hand nimmt. So war es bei dem A310 noch möglich, dass Pilot und Autopilot "gemeinsam" das Flugzeug steuern. Mit dem A320 wurde dieser Missstand behoben – greift der Pilot in die Steuerung ein, schaltet sich der Autopilot automatisch ab.
Air Inter Absturz
Ein anderer Pilot stellt eine falsche Sinkrate am Autopiloten des Airbus (FCU, Flight Control Unit) ein. Der Unfall ereignete sich am 20. Januar 1992 in Straßburg, Frankreich. Ein Airbus A320-111 (F-GGED) der Air Inter stürzte während des Anflugs auf den Flughafen Straßburg wegen falsch voreingestellter Sinkrate ab. Von den 96 Menschen an Bord starben 87 Menschen (davon 5 Besatzungsmitglieder), 9 Menschen überlebten (davon ein Besatzungsmitglied). Das Flugzeug flog in 2710 ft Höhe in Wolken in einen Berg (CFIT) in der Nähe von Mont Sainte-Odile (Odilienberg) am Ostrand der Vogesen. Es kam aus Lyon und befand sich im Endanflug (final approach) auf Straßburg. Wegen der falsch eingegebenen Sinkgeschwindigkeit sank das Flugzeug mit 3300 ft/min statt mit 800 ft/min. Statt wie beabsichtigt einen Sink-Gleitpfad von 3,3° einzugeben, handelte es sich in Wirklichkeit um eine Sinkrate von 3300 ft/min. Dadurch sank das Flugzeug unter die Sicherheitsmindesthöhe. Das Flugzeug war nicht mit GPWS ausgerüstet. Bei der Unfallauswertung wurde unter anderem das schlechte Design des Autopilotenbedienpanels als Unfallfaktor ermittelt. In einem Prozess, der 14 Jahre später am 31. Juli 2006 begann, wurden sechs Verantwortliche in der französischen Luftfahrt (unter anderem leitende Airbus- und Air France-Angestellte) wegen fahrlässiger Tötung angeklagt.
Weitere Probleme
Auch Hobbypiloten, die nur gelegentlich ein Leichtflugzeug fliegen, das mit einem Autopiloten ausgerüstet ist, haben sich durch unbemerktes und unbeabsichtigtes Einschalten des Autopiloten in Gefahr gebracht.
Das logische Verhalten der Autopiloten kann komplex sein und bei unterschiedlichen Modellen abweichen. So erfolgt z. B. im Geradeausflug eine Höhensteuerung unter Hinzuziehung der Trimmung des Höhenruders, während im Landeanflug keine Trimmung des Höhenruders durch den Autopiloten erfolgt, sondern das Höhenruder ausschließlich durch Vergrößerung der Steuerkraft bedient wird. Wenn der Pilot nun im Landeanflug den Autopiloten ausschaltet, dann kann das Flugzeug so stark vertrimmt sein und einen so starken Druck am Steuerknüppel erfordern, dass ihn der Pilot nicht aufbringen kann. Der Pilot benötigt dann erst einige Sekunden, um das Flugzeug korrekt zu trimmen und es während des Landeanfluges wieder in seine volle Gewalt zu bringen. Gerade während des kritischen Landeanfluges bei Seitenwindlandungen hat dieses Verhalten des Autopiloten bereits zu Unfällen geführt, wenn dieser zu spät (in zu geringer Höhe) ausgeschaltet wurde.
Durch den Autopiloten kann sich der Übungsstand des Piloten verschlechtern, insbesondere bei Linienpiloten, wo der Autopilot während über 95 % der Flugzeit eingeschaltet ist. Eventuell wird dann auch bewusst auf das Fliegen mit dem Autopiloten verzichtet, um die fliegerischen Fähigkeiten und Reflexe des Piloten zu verbessern. Das Gleiche trifft für Landungen zu, bei denen Linienpiloten sehr oft manuell fliegen und bewusst auf den Einsatz des Autopiloten verzichten. Zum Einen, um in Übung zu bleiben, zum Anderen, um formale Anforderungen zu erfüllen, da sie im Monat eine bestimmte Anzahl von Landungen brauchen, um ihre Berechtigung für Schlechtwetterlandungen (CAT II und III) zu behalten.
Es gilt der Grundsatz, dass der Pilot nur solche Manöver vom Autopiloten fliegen lassen darf, die er auch selber manuell beherrscht. Sonst ist er bei einem unerwartetem Ausfall des Autopiloten möglicherweise nicht in der Lage, das Flugzeug zu fliegen.
Höhen
Der Autopilot wird nach dem Start erst in einer bestimmten, vorgeschriebenen Flughöhe eingeschaltet. Bei großen Verkehrsflugzeugen liegt diese Höhe um die 400 ft. Automatische Starts mittels Autopilot sind in Flugzeugen nicht vorgesehen.
Auch bei der Landung wird der Autopilot spätestens in einer bestimmten, vorgeschriebenen Flughöhe ausgeschaltet. Lediglich für automatische Landungen bleibt der Autopilot bis zum Aufsetzen eingeschaltet. Bei der automatischen Landung hält der Autopilot das Flugzeug nach dem Aufsetzen auf der Mittellinie der Landebahn und bremst das Flugzeug mittels Zu- und Abschalten der Schubumkehr und das reguläre radiale Bremsen ab.
Autoland
Für die Autolandfunktion des Autopiloten ist es meist erforderlich, dass das Flugzeug mit drei Autopiloten ausgerüstet ist.
Die drei Autopiloten müssen zum Zeitpunkt des Einschaltens der Autoland-Funktion fehlerlos funktionieren. Sollte während der automatischen Landung einer der drei Autopiloten ausfallen oder einen anderen Zustand annehmen, als die übrigen beiden Autopiloten, dann wird von der „Mehrheit“ der anderen beiden Autopiloten „demokratisch“ entschieden, welcher Autopilot defekt ist. Dieser Autopilot wird dann ausgeschaltet und der Landeanflug wird mit zwei Autopiloten fortgesetzt. Die automatische Landung darf in diesem Fall – Ausfall während des Anfluges – auch mit nur zwei Autopiloten erfolgen. Der Pilot darf während der automatischen Landung nicht seinen Steuerknüppel berühren. Die automatische Landung erlaubt keinerlei Eingriffe seitens des Piloten. Die automatische Landung wird nur sehr selten durchgeführt, da nach der Landung das Rollen am Boden sehr schwierig ist. Beispielsweise ist es dem Piloten aus seinem Cockpit in einer Höhe von 15 m über dem Boden bei fast Null Metern Sicht unmöglich mit seinem Flugzeug von der Landebahn abzurollen, da er kaum die Mittellinienbefeuerung der Rollbahn erkennen kann. Er muss dann also auf der Landebahn stehen bleiben und darauf warten, dass sich die Sichtverhältnisse verbessern. Die Landebahn ist solange blockiert.
Limits
Autopiloten haben typischerweise eine ca. viermal so hohe Reaktionsgeschwindigkeit wie Piloten. Bei böigem Wind wird jedoch teilweise nicht mit Autopiloten geflogen, insbesondere bei Landungen mit starkem Seitenwinden, wie z.B. während Orkans „Emma", wo am 1. März 2008 ein Airbus A320 der Lufthansa beim Anflug auf Runway 23 des Flughafens Hamburg mit einer Tragflächenspitze den Boden berührte, nachdem das Flugzeug von einer Windbö erfasst worden war. Der Autopilot schaltet sich unter solchen Bedingungen eventuell automatisch ab, was mit einem lauten Warnton im Cockpit angezeigt wird. Ebenso wird das manuelle Abschalten des Autopiloten – durch den Piloten – mit einem lauten Warnton deutlich signalisiert.
Einachsige Autopiloten
 Bild 2: Autopilot KAP 140, einachsig
Bild 2: Autopilot KAP 140, einachsig Bild 3: Autopilot KAP 140, einachsig, Roll-Modus aktiviert
Bild 3: Autopilot KAP 140, einachsig, Roll-Modus aktiviertDie einfachste Form des Autopiloten ist der einachsige Autopilot, auch als "wing leveller" (sinngemäß auf deutsch: Tragflächen horizontal ausrichten) bekannt. Er kontrolliert nur die Drehung um die Längsachse (Rollachse) – das Rollen. Er kann die Tragflächen horizontal halten, indem er das Querruder steuert. Der einachsige Autopilot hat nur den Horizontalmodus. Mit dem Querruder sind nur Richtungsänderungen möglich, nicht jedoch eine Änderung der Flughöhe.
Ein weit verbreiteter Autopilot für Kleinflugzeuge und Zweimots ist der Bendix/King KAP 140. Seine Modellvariante als einachsiger Autopilot hat fünf Bedienknöpfe. Mit der Taste AP (für:Autopilot) wird der KAP 140 eingeschaltet. Dabei ist der ROL-Modus (Roll-Modus) aktiviert, der die Tragflächen in horizontaler Position hält. So kann das Flugzeug nicht zur Seite abkippen. Wenn der Pilot vorher eine angemessene Geschwindigkeit eingestellt hat und das Flugzeug ausgetrimmt ist, dann fliegt es in einem sehr stabilen Zustand.
.jpg) Bild 4:Kurskreisel - Rechts unten am rot beschrifteten Knopf (HDG) läßt sich der Kurs eindrehen, den der Autopilot halten soll. Momentan ist ein Kurs von 325° eingedreht (roter Strich). Es liegt ein aktueller Kurs von 295° an. Mit dem linken unteren Drehknopf (PUSH, erst drücken, dann drehen) wird der Kurskreisel regelmäßig nach den Kurswerten am Magnetkompass nachjustiert.
Bild 4:Kurskreisel - Rechts unten am rot beschrifteten Knopf (HDG) läßt sich der Kurs eindrehen, den der Autopilot halten soll. Momentan ist ein Kurs von 325° eingedreht (roter Strich). Es liegt ein aktueller Kurs von 295° an. Mit dem linken unteren Drehknopf (PUSH, erst drücken, dann drehen) wird der Kurskreisel regelmäßig nach den Kurswerten am Magnetkompass nachjustiert.Die vier weiteren, separat einzuschaltenden Modi sind:
- HDG (zum Erfliegen und Halten eines am Kurskreisel eingestellten Kurses)
- NAV (Navigation; zum Erfliegen und Halten eines am VOR oder GPS eingestellten Kurses)
- APR (Approach; Anflug; wirkt wie NAV-Modus, ist jedoch deutlich empfindlicher, so dass ein sehr genauer Landekurs geflogen werden kann)
- REV (Reverse; Umkehrkurs; wirkt wie APR-Modus, jedoch reagiert der Autopilot auf die Ausschläge der Kursnadel genau anders herum; dieser Modus wird bei vielen Autopiloten auch als BC – back course, Umkehrkurs oder Rückseitenkurs – bezeichnet)
Die vier Tasten – HDG, NAV, APR, REV – werden durch Drücken aktiviert und durch erneutes Drücken deaktiviert. Es kann jeweils nur eine der vier Tasten aktiviert sein. Sind alle vier Tasten deaktiviert, dann fällt der Autopilot zurück in den ROL-Modus – sofern der Autopilot eingeschaltet ist. Der ROL-Modus ist der kleinste gemeinsame Nenner aller Modi des einachsigen Autopiloten.
Zweiachsige Autopiloten
 Bild 5: Autopilot KAP 140, zweiachsig, ohne Höhenvorwahl
Bild 5: Autopilot KAP 140, zweiachsig, ohne HöhenvorwahlZweiachsige Autopiloten kontrollieren zusätzlich zur Rollachse die Pitchachse, also das Nicken um die Querachse. Sie können das Flugzeug zusätzlich um die Querachse nicken lassen (eng. pitching) – die Nase des Flugzeuges wird angehoben oder gesenkt. Mit dieser zweiten Achse des Autopiloten ist eine Höhensteuerung möglich, der vertikale Modus. Dazu steuern sie ein Pitch Servo und ein Pitch Trim Servo an.
Einachsige Autopiloten können das Flugzeug nur seitlich steuern (laterale Navigation), während zweiachsige Autopiloten das Flugzeug seitlich und in der Höhe (vertikale Navigation) steuern können.
In einfacher Ausführung ist der zweiachsige Autopilot ein "wing leveller" mit begrenzter Fähigkeit die Schwingungenen und die Querachse, also das Nicken zu korrigieren. Am anderen Ende der Produktskala von zweiachsigen Autopiloten gibt es sehr komplexer Ausführung, die für die automatische Flugführung geeignet sind, wobei die Empfangssignale der Radionavigationsempfänger an Bord (VOR, NDB, GPS) ausgewertet werden.
Der KP 140 hat neben den vier Tasten für die horizontalen Modi (HDG, NAV, APR, REV) noch eine fünfte Taste für den vertikalen Modus – ALT (Altitude; Höhe). Bei aktivierter ALT-Taste hält der Autopilot die aktuelle Flughöhe bei.
Durch Drücken der Taste UP (hoch) wird ein Steigflug mit ca. 500 ft/min eingeleitet, der so lange beibehalten wird, wie die Tast gedrückt wird. Entsprechend erfolgt beim Drücken der DN-Taste (Down, runter) ein Sinkflug.
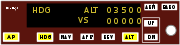 Bild 6: Autopilot KAP 140, zweiachsig, mit Höhenvorwahl
Bild 6: Autopilot KAP 140, zweiachsig, mit HöhenvorwahlWeiterhin gibt es zweiachsige Autopiloten mit Höhenvorwahl, so dass sich eine Flughöhe vorgeben lässt. Auch die vertikale Geschwindigkeit, mit der das Flugzeug zu dieser Flughöhe fliegt, lässt sich einstellen. Der Approach-Modus (Anflug) ist dann auch in der Lage dem ILS-Gleitpfad vertikal zu folgen.
Das Modell des KAP 140 mit Höhenvorwahl hat zusätzlich einen zweiteiligen Drehschalter zur Eingabe der Höhe und die Tasten ARM und BARO.
Da der Autopilot bei diesen Modellen nicht den Schubhebel kontrolliert, muss der Pilot weiterhin diese Aufgabe übernehmen. Beim Anflug muss er auf die richtige Anfluggeschwindigkeit achten. Beim Steigflug muss er aufpassen, dass der Autopilot das Flugzeug nicht wegen einer zu großen Steiggeschwindigkeit in einen Strömungsabriss steuert. Die Kontrolle und Aufmerksamkeit des Piloten ist also weiterhin erforderlich.
Noch besser ausgestattete Autopiloten haben zusätzlich zur Höhenvorwahl noch eine Höhenwarnung, die 1000 bzw. 100 ft vor Erreichen einer voreingestellten Flughöhe ein akustisches und/oder optisches Warnsignal für den Piloten gibt.
Piper Alti Control 3
Bei diesem sehr alten Autopiloten wurde der laterale und vertikale Modus von zwei völlig verschiedenen Geräten gesteuert. Von dieser Ausnahme abgesehen lässt sich bei modernen Autopiloten der Modus zum Halten der Höhe nicht mehr isoliert einschalten. Er ist immer mit der Aktivierung des ROL-Modus verbunden.
Dreiachsige Autopiloten
Bei dreiachsigen Autopiloten wird zusätzlich das Seitenruder angesteuert, welches das Flugzeug um die Hochachse,also das Gieren, steuert. Für den Kurvenflug ist diese Seitenrudersteuerung jedoch nicht erforderlich. Dreiachsige Autopiloten sind in kleineren Flugzeugen nicht erforderlich, in großen, modernen, komplexen Verkehrsflugzeugen aber meist der Standard.
Die interne Logik dieser Autopiloten unterscheidet meist zwischen den verschiedenen Flugphasen (Start, Steigflug, Reiseflug, Sinkflug, Anflug, Landephase). Es gibt Autopiloten, die bis auf das Rollen am Boden alle Flugphasen automatisiert haben. In einige Autopiloten ist ein Traffic Alert and Collision Avoidance System (TCAS) integriert. Ein moderner Autopilot ist oft ein integraler Bestandteil eines Flight Management System (FMS).
Das Seitenruder hilft beim koordinierten Fliegen einer Kurve. Außerdem kann mit dem Seitenruder die „Dutch Roll" verhindert werden. Das ist ein Aufschaukeln zu einer kreisförmigen Taumelbewegung der Flugzeugnase, das besonders bei größeren Flugzeugen spürbar auftritt, insbesondere bei Schulterdeckern mit Pfeilflügeln. Die bei der Dutch roll auftretende Gierbewegung um die Hochachse wird mit dem Gierdämpfer (engl. yaw damper) unterdrückt. So wird der Komfort für die Passagiere erhöht, da insbesondere bei größeren Flugzeugen mit langem Rumpf diese ununterbrochen oszillierende Bewegung unangenehm spürbar ist.
Der Gierdämpfer stellt also die dritte Achse des Autopiloten dar. Bei kleineren Maschinen wird ein vorhandener Gierdämpfer zu Start und Landung ausgeschaltet, um dem Pilot die volle Gewalt über das Seitenruder zu geben. Bei den Großraumflugzeugen von Boeing soll der Gierdämpfer laut Betriebshandbuch immer eingeschaltet bleiben. Bei den Flugzeugen von Airbus hat der Pilot überhaupt keine Kontrolle, ob der Gierdämpfer ein- oder ausgeschaltet ist.
Autopilot und Flight director
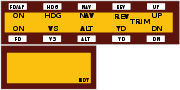 Bild 7: Der Flight director (F/D) kann separat eingeschaltet werden, während der Autopilot nur zusammen mit dem F/D eingeschaltet werden kann (F/D A/P). Der A/P kann nicht ohne den F/D eingeschaltet werden.
Bild 7: Der Flight director (F/D) kann separat eingeschaltet werden, während der Autopilot nur zusammen mit dem F/D eingeschaltet werden kann (F/D A/P). Der A/P kann nicht ohne den F/D eingeschaltet werden.Der Flight director arbeitet mit dem Autopiloten zusammen. Der Flight director zeigt die Steuerbefehle des Autopiloten auf dem künstlichen Horizont an, beim Glascockpit auf dem Primary flight display. Bei ausgeschaltetem Autopiloten muss der Pilot durch manuelle Steuereingaben die Zielmarke des Flight directors auf den künstlichen Horizont ausrichten. Bei eingeschaltetem Autopiloten hält dieser die Zielmarke des Flight directors auf den künstlichen Horizont ausgerichtet. Der Flight director führt also den Piloten bzw. den Autopiloten. Der Flight director ist nicht bloß eine Anzeige, was der Autopilot macht, sondern umgekehrt folgen die Servos des Autopiloten den Vorgaben des Flight directors. Der Autopilot wird deshalb nur bei eingeschaltetem Flight director benutzt.
Bei großen, komplexen Flugzeugen übernimmt der Flight director weitere zusätzliche Aufgaben beim Start und beim Durchstarten.
Autopilot und Autothrottle
Neben der klassischen Steuerung der Fluglage über die Ruderflächen steuern komplexe Autopiloten meist noch Triebwerksleistung (eng. thrust control) über die Schubregler (eng. throttles), um die Fluggeschwindigkeit optimal zu regeln. Oft wird im Flug auch noch das Umpumpen von Treibstoff zwischen den verschiedenen Tanks und in Trimtanks automatisch übernommen, um die Fluglage aus wirtschaftlichen Gründen zu optimieren.
Autothrottle ist die automatische Schubregelung, die bei komplexen Systemen auch vom Autopiloten gesteuert wird. Wird am Autopiloten eine bestimmte Fluggeschwindigkeit gewählt, dann wird diese durch die Autothrottlefunktion gehalten – mittels Erhöhung oder Verringerung der Schubleistung. Die Steuerung der Autothrottle erfolgt über das FMS entsprechend des Flugprofils (z. B. Steigflug, Reiseflug).
Autopilot und Flight Management System
 Bild 8:Mode Control Panel (Autopiloten Bedientafel) einer Boeing 777
Bild 8:Mode Control Panel (Autopiloten Bedientafel) einer Boeing 777In den moderneren Großraumflugzeugen ist der Autopilot integraler Bestandteil des Flight Management Systems (FMS). Hier sind noch weitere Modi verbreitet:
- FLCH (Flight Level Change; Änderung der Flugfläche, wobei die Fluggeschwindigkeit auch im Steigflug bzw. Sinkflug beibehalten wird, indem der Autopilot die Steigrate bzw. Sinkrate anpasst),
- VNAV (vertikale Navigation entlang der einprogrammierten Flugroute)
- LNAV (laterale Navigation entlang der einprogrammierten Flugroute)
- THR REF (Throttle Reference Setting, Setzen der Triebwerksdrehzahl N1 auf Nenndrehzahl)
- Go-Around Modus (Durchstarten, mit horizontalen Tragflächen)
- Pitch Hold Modus (aktuelle Neigung der Flugzeugnase beibehalten)
Auf dem Primary Flight Display (PFD; Hauptanzeigebildschirm) des Glascockpits wird der jeweils aktive Modus des Autopiloten angezeigt. Ebenso (in anderer Farbe oder umrahmt) wird der voreingestellte Modus (engl. armed) des Autopiloten angezeigt, der sich als nächstes selber aktivieren wird.
Landung mit Autopilot
Eine Landung mit Autopilot auf der Landebahn und das anschließende Ausrollen, also das Halten auf der Landebahnmittellinie wird als CAT IIIb Landung oder Autoland bezeichnet. Eine CAT III Landung erfordert ein entsprechend ausgerüstetes und zugelassenens Flugzeug, eine dafür geschulte und zugelassenen Besatzung und einen entsprechend ausgerüsteten und zugelassenen Flughafen.
Als CAT IIIc Landung werden Systeme bezeichnet, die das Flugzeug nicht nur auf den Boden bringen und auf der Landebahn automatisch ausrollen, sondern zusätzlich das Rollen über die Rollwege zur Parkposition automatisch steuern.
Kategorieneinteilung der Autopilotenlandungen
Hauptartikel: ILS-Kategorien
Instrumentenunterstützte Landungen werden von der ICAO in Kategorien eingeteilt. Diese Kategorien hängen von der minimalen Sichtweite ab und von dem Grad, in dem die Landung automatisch, ohne Eingreifen des Piloten, durchgeführt werden kann.
CAT I erlaubt dem Piloten mit einer Entscheidungshöhe von 200 ft (61 m) und einer Landebahnsicht (engl. runway visual range , RVR) von 2400 ft (730 m) zu landen. Dafür reicht ein einziger Autopilot im Flugzeug aus.
CAT II erlaubt dem Piloten mit einer Entscheidungshöhe von 100 bis 200 ft (30 bis 61 m) und einer Landebahnsicht von 1000 ft (305 m) zu landen. Dazu muss das Flugzeug mit einem ausfallsicheren fail-passive Autopiloten ausgerüstet sein (siehe unten und Ausfallverhalten redundanter Systeme).
CAT IIIa erlaubt dem Piloten mit einer Entscheidungshöhe von 50 ft (15 m) und einer Landebahnsicht von 700 ft (213 m) zu landen. Auch dazu muss das Flugzeug mit einem ausfallsicheren fail-passive Autopiloten ausgerüstet sein. Der Autopilot muss so genau arbeiten, dass die Wahrscheinlichkeit einer Landung außerhalb der Landefläche nur 1 : 106 beträgt.
CAT IIIb-Landungen erfordern noch ein integriertes System zum automatischen Ausrollen auf der Landebahn nach dem Aufsetzen. Die Entscheidungshöhe liegt dabei unter 50 ft und kann auch bei 0 m liegen, während eine Landebahnsicht von 250 ft (76 m) erforderlich ist. Bei einer Flugzeuglänge von 70 m ist das gerade mal eine Sichtweite von einer guten Flugzeuglänge. In den USA ist für CAT IIIb eine Landebahnsicht von 300 ft (91 m) erforderlich. Für solche Landungen muss der Autopilot ausfallsicher fail-operational (siehe unten und Ausfallverhalten redundanter Systeme) sein und die Landebahn muss mit einem Führungssystem ausgestattet sein, das auch ausfallsicher sein muss (fail passiv ???). Für Landungen mit 0 m Entscheidungshöhe und einer RVR unter 357 ft (114 m) muss das Führungssystem der Landebahn fail-operational sein.
CAT IIIc-Landungen sind wie CAT IIIb-Landungen, jedoch mit 0 m Entscheidungshöhe und einer Landebahnsicht von 0 ft, sogenannte Landungen unter "zero-zero" Bedingungen. Gegenwärtig ist kein Flugzeug für CAT IIIc-Landungen zugelassen. Dazu wird noch eine verlässliche Methode benötigt, um das Flugzeug und die Bodenfahrzeuge zuverlässig ohne Sicht am Boden steuern zu können.
Fail-passive / fail-operational
Bei einem fail-passive-Autopiloten bleibt das Flugzeug im Falle eines Ausfalls in einer kontrollierbaren Fluglage, so dass der Pilot die Kontrolle übernehmen kann und durchstarten kann bzw. die Landung durchführen kann. Der fail-passive-Autopilot ist meist ein Zweikanalsystem.
Bei einem fail-operational-Autopiloten kann auch im Fehlerfall noch ein automatischer Anflug mit Ausschweben und Landung durchgeführt werden. Voraussetzung ist, dass der Fehler unterhalb der Alarmhöhe (alert height) auftritt. Dann setzt der Autopilot trotz teilweisem Systemausfall den Landeanflug fort. Der fail-operational-Autopilot ist meist ein Dreikanalsystem oder Zweikanalsystem.
Wichtigste Aufgaben des Autopiloten
Ein Autopilot kann dem/den Piloten einen Teil der Steuerung, der Dateneingabe für Luftstraßen oder des ermüdenden Justierens (etwa bei der Trimmung) abnehmen, erspart jedoch nicht die dauerhafte Kontrolle der Pilotenkanzel-Instrumente. Besonders angenehm ist er bei Turbulenzen oder sonstwie unruhigen Wetterverhältnissen, weil er kleine, unbeabsichtigte Kursänderungen ausgleicht oder für gleichmäßigen Kurvenflug sorgt.
Wirkung und „Auspendeln“ einer Windböe
Ein Flugzeug in der Luft ist ständig wechselnden Einflüssen ausgesetzt, die es wiederholt aus jenem Flugzustand herausführen, der vom Piloten eingestellt wurde oder sich aus aerodynamischen Gründen ergibt. Wenn z. B. eine heftige Windbö das Luftfahrzeug trifft, drückt sie das Seitenruder etwas nach links oder rechts, woraus sich eine leichte Kurve von einigen Sekunden Länge ergibt.
In kleinen Flugzeugen ohne Autopilot „pendelt“ der Pilot diesen unvermeidlichen Fehler aus, indem er ebenso lang in die andere Richtung kurvt. Hat er zu wenig Erfahrung, um dies intuitiv zu tun, kann er z. B. rasch auf den Wendezeiger blicken und dessen Ausschlag bewusst für kurze Zeit auf die andere Seite lenken. Der Autopilot hingegen misst und registriert die kurzfristige Änderung des Kurses (allenfalls auch der Querlage und der Flughöhe) und kompensiert die Änderungen selbstständig.
Unruhige Flugzustände in Linienflugzeugen
In größeren Flugzeugen – die auch höhere Reisegeschwindigkeiten haben – ist die Charakteristik der „Störungen“ oft ganz anders. So folgen Linienflüge strengeren Regeln als die Privatfliegerei. Sie weichen im Regelfall beispielsweise den Wolken entlang der geplanten Flugroute nicht aus (Gewitter ausgenommen), was erhebliche Ab- und Aufwinde bedeuten kann.
Die Tragflächen müssen viel stärkere Kräfte aufnehmen als bei 2- bis 6-sitzigen Maschinen. So verbiegen sie sich im Abwind zwischen durchflogenen Wolken bis zu einigen Metern. Wird dabei der linke Flügel mehr gedrückt als der rechte, beginnt das Flugzeug dorthin zu drehen und der (Auto-)Pilot greift ein.
Ähnliche Steuerungsaufgaben sind das Nachtrimmen bei Gewichtsverlagerungen (etwa wenn sich Personen durch die Kabine bewegen, oder sich im Frachtraum des Flugzeugs Gepäckstücke verschieben). Doch auch der ganz normale Treibstoff-Verbrauch ändert die Lage des Schwerpunktes.
Standard-Tätigkeiten des Autopiloten
Wenn das Flugzeug nach dem Start bis zur gewünschten Höhe gestiegen ist, geht es in den horizontalen Reiseflug über. Betrachten wir zunächst das Einhalten einer bestimmten Flughöhe:
Solange sich das Flugzeug unter konstanten inneren und äußeren Bedingungen (Gewichtsverteilung, Atmosphäre usw.) geradeaus bewegt, bleibt die Flughöhe konstant. Jedoch wird schon durch den Verbrauch von Treibstoff das Flugzeug leichter und beginnt zu steigen. Deshalb wird die barometrische Höhenmessanlage bald eine Abweichung von der vorgewählten Höhe feststellen. Der Pitchkanal, der den Anstellwinkel regelt, gibt an das Höhenruder ein Signal zur Ausregelung der Differenz, bis die als Sollwert vorgegebene Höhe wieder erreicht ist. Da durch den Gewichtsverlust der Auftrieb und deshalb der Anstellwinkel verringert werden kann und somit der Widerstand sinkt, steigt die Fluggeschwindigkeit, weshalb nun der Geschwindigkeitskanal (Auto Throttle Computer) die Motorleistung so nachregelt, dass die vorgewählte Höhe bei der ebenfalls vorgewählten (optimierten) Sollgeschwindigkeit eingehalten wird.
Die Flugrichtung wird über den Rollkanal geregelt. Angenommen, der Pilot stellt 315° als Kurs ein, also genau nach Nordwesten. Ändern sich die Außenbedingungen, wie zum Beispiel die Windrichtung, wird das Flugzeug aus dem berechneten Kurs abdriften, wenn nicht gegengesteuert wird. Eine Kompassanlage misst nun die Abweichung vom vorgewählten Kurs und gibt zum Ausgleich ein Signal an die Querruder ⇒ das Flugzeug kippt ein wenig (dreht sich seitlich um die Längsachse). Das Seitenruder arbeitet wie eine Stabilisierungsflosse, und das Flugzeug dreht sich zusätzlich um die Hochachse, bis der Kurs 315° wieder anliegt. Danach steuert der Rollkanal wieder in eine mittlere Lage. Während der seitlichen Bewegung hatte das Flugzeug aber einen höheren Widerstand und nahm dadurch die Nase nach unten – worauf sofort der Pitchkanal angesprochen und die Nase wieder nach oben gesteuert hatte. Auch diese Korrektur hatte zusätzlichen Widerstand verursacht und die Fahrt verringert, weshalb der Fahrtregler die Motorleistung wieder erhöhen musste.
Über diese Standard-Routinen hinaus gibt es eine große Zahl weiterer Regelfunktionen, die unerwünschte Bewegungen abfangen und den Passagieren den Flug angenehmer machen. Die Piloten wiederum können sich in anspruchsvollen Flugphasen – wie etwa vor der Landung oder bei Planänderungen durch die Flugsicherung – ihren Tätigkeiten widmen, ohne das Flugzeug dauernd nachsteuern zu müssen.
Positionsbestimmung
Die Position liest ein moderner Autopilot aus einem INS aus und zusätzlich, soweit empfangbar, aus mehreren VOR-Stationen und immer häufiger auch aus GPS-Signalen. Besonders über Ozeanen stand vor der GPS-Ära nur das INS zur Verfügung Mit dem Fortschreiten der Flugdauer akkumulierte sich ein Positionsfehler im INS. Zur Fehlerreduzierung hatte das INS ein Karussell-System, das sich jede Minute drehte, so dass die Fehler in verschiedene Richtungsvektoren geteilt wurden und sich so gegenseitig aufhoben. Die Messfehler der Gyroskope, die die Positionsdaten immer mehr verfälschen, werden als Drift bezeichnet. Dieser Fehler beruht auf den physikalischen Eigenschaften des Systems, unabhängig davon, ob es sich um mechanische Gyroskope oder Lasergyroskope handelt.
Mittels digitaler Datenverarbeitung und eines 6-dimensionalen Kalmanfilters, werden die Diskrepanzen zwischen beiden aufgelöst. Die 6 Dimensionen sind Längengrad, Breitengrad, Flughöhe, Querwinkel (Rollneigung), Nickwinkel und Gierwinkel..
Auf vielen transozeanischen Flugrouten muss das INS eine bestimmte Positionsgenauigkeit gewährleisten (engl. performance factor). Deshalb wird im Flug auch die Größe des möglichen Positionsfehlers überwacht. Je länger der Flug dauert, um so größer wird der Fehler, der sich im System aufaddiert. In Landnähe kann dann die Flugzeugposition mit Zusatzinformationen von Radionavigationsanlagen (VOR, VOR/DME) aktualisiert werden, außerhalb der Reichweite von VOR's kann die Position über GPS korrigiert und aktualisiert werden. Das primäre System zur Positionsbestimmung bleibt aber das INS, da es als unabhängiges Bordsystem am sichersten ist und nur vom eigenen System abhängt (Software, Stromversorgung). Das INS kann zwar immer ungenauer werden, aber es kann nicht von außen abgeschaltet werden, während VOR oder GPS durch deren Betreiber abgeschaltet werden können.
Das INS besteht meist aus drei IRU's (also die Gyroskope), die als Eingabegröße lediglich die Schwerkraft und die Erdrotation benötigen. Vom Piloten muss die Anfangposition des Flugzeuges in das System eingegeben werden.
Die Gyroskope messen die Beschleunigung (accelrometer), um über die Berechnung der Geschwindigkeit zu ermitteln, welche Entfernung sie von der Anfangsposition des Flugzeuges haben.
Geschichte der Autopiloten
Die Hauptaufgabe des Autopiloten ist, den Piloten von lästigen und ermüdende Steuervorgängen beim langwierigen Streckenflug zu entlasten. Dazu werden die auf das Flugzeug wirkenden Kräfte in den drei Achsen und drei Winkeln erfasst, mit den Sollwerten verglichen und die notwendige Lageregelung automatisch an die Steuerflächen weitergegeben. Das Flugzeug sollte mit Servounterstützung der Steuerelemente ausgestattet sein: Diese Servoantriebe verstärken die Steuerkräfte des Piloten auf die (z. T. riesigen Ruderflächen) und übertragen ebenfalls die Korrekturen, die der „Autopilot“ zur Einhaltung des eingestellten Kurses errechnet hat. Der 3-Achs Autopilot erhält meist von einem kardanisch aufgehängten 3-Achs Beschleunigungsmesssystem (früher Kreisel und Gyro, heute Laserkreisel) die tatsächlich auf das Flugzeug wirkende Kräfte und nimmt automatisch die notwendigen Steuerklappenstellungen vor.
Eine frühe Version eines Autopiloten, der Fluglage und Richtung hielt, wurde bereits 1914 durch Lawrence Sperry entwickelt, 1918 gründete Sperry die Lawrence Sperry Aircraft Company, eine Firma für Flugnavigationskomponenten, die auch sein neues Auto-Pilot-System herstellte und vertrieb.
Um 1930 wurden dann z. B. von Junkers spezielle Autopilotversionen entwickelt. An der berühmten „Tante Ju“ (Junkers Ju 52/1m – oder bei Junkers W34fao – sollten sie vor allem die Trimmung und Höhensteuerung verbessern. Letzteres ist mit dem Steuerknüppel vor allem bei Windböen oder unter Stress nicht einfach und ist bis heute der Prüfstein für junge Kopiloten, ob sie auch bei Landungen unter Scherwinden eine „gute Figur“ machen.
Später wurden Sturzflug-Autopiloten für Militärflugzeuge entwickelt, z. B. die Junkers Ju 87 B. Ein solcher Autopilot ist mit der Luftbremse verbunden und senkt das Flugzeug in die Sturzkampfstellung. In geringer Höhe (oder nach Bombenabwurf) bringt der Autopilot das Heck wieder in die Ursprungslage.
Ab 1930 wurden auch bei Siemens & Halske Autopilotsysteme entwickelt: Der Begriff „Autopilot" wurde 1937 der Firma als Warenzeichen geschützt.[1] Die 1939 gegründete Tochtergesellschaft Luftfahrtgerätewerk Hakenfelde (LGW) war Nachfolger der seit 1934 tätigen Siemens Apparate und Maschinen GmbH (SAM) in Berlin-Marienfelde.
Im 2.Weltkrieg kamen mit der enormen Reichweitenerhöhung neue Anforderungen auf die Piloten zu: Es galt stundenlang den Kurs zu halten, Instrumente und Kurs zu überwachen und der Pilot war davon schon vor Erreichen des Zieles stark ermüdet. Deshalb wurde von General Electric (GE) ca. 1943 im Auftrag der United States Army Air Forces (USAAF) eigens ein Autopilot entwickelt, der alle 3 Achsen komplett steuerte. Diese entlastete den Piloten im engen Verbandsflug enorm. Der Autopilot der Boeing B-29 war sogar mit dem speziellen Bomben-Zielgerät der US-Firma Norden („Norden Bombsight") verbunden: Der Pilot übergab wenige Minuten vor dem Ziel die Kontrolle der Maschine an den Bombenschützen, der die Maschine mit dem Zielgerät dann per Fadenkreuz auf Zielkurs steuerte.
Weitere Entwicklungen unterstützten den Startvorgang, die Betätigung des Querruders (Steuerklappen an den Flügeln), das Auspendeln von Kurven bei verblasenem Seitenruder und schließlich das komplette Ausgleichen von Böen und Turbulenzen. Manche Piloten beklagten allerdings den Verlust des Feedbacks über Wetter und Windbedingungen, die den Druck auf die Steuerflächen und damit auf den Steuerknüppel variieren. Um dem entgegen zu wirken, werden in modernen Systemen auch Aktuatoren am Steuerknüppel angebracht, die auch das Flugzeug wirkende Windkräfte etc. simulieren. Die Böen werden ausgesteuert, aber der Pilot bekommt trotzdem die Rückmeldungen (Feedback) über deren Stärke mittels den Aktoren an den Steuerelementen. In der Lockheed F-104G war z. B. ein kombiniertes „Stick Shaker/Stick Pusher System“ eingebaut, das bei einem drohenden Überziehen den Steuerknüppel schüttelte und nach vorne drückte. Diese Funktion konnte im Notfall abgeschaltet werden.
Eine Komponente des Autopiloten ist auch der „Speedhold“, also das exakte Halten der Geschwindigkeit. Das ist im Formationsflug sehr wichtig und würde hohe Konzentration erfordern. Diese Funktion kann, z. B. bei der F-104G, getrennt von der Lageregelung /-dämpfung geschaltet werden.
In den 50er bis 70er Jahren wurden enorme Verbesserungen durch Koppelung mit den Trägheitsplattformen erreicht. Aber erst mit der Entwicklung der „Fly-by-Wire“-Technik der deutschen Senkrechtstarter (VFW-Fokker VAK 191 B, EWR VJ 101C und der Dornier Do-31) und später z. B. dem europäischen Airbus und dem Kampfflugzeug Tornado, wurden bahnbrechende Fortschritte bei den Autopiloten erzielt. Mit Einführung der Digitaltechnik in den 90er Jahren wurde der Autopilot mit der Fluglagesteuerung verschmolzen: Der Pilot gibt die Richtung vor – die Lageregelung bringt das Flugzeug in diese gewünschte Richtung und behält sie bei.
Computersystem
Die Hardware eines Autopiloten für ein typisches großes Flugzeug besteht aus fünf 80386 CPUs, dabei ist jede CPU auf einer eigenen Leiterplatte. Die 80386-CPU ist preisgünstig, hat ein ausgereiftes Design und ist durchgetestet. Auf dem 80386 kann ein echter virtueller Computer implementiert werden. Neuere Versionen sind sogar strahlenresistent und für die Verwendung in der Luftfahrt zusätzlich verstärkt. Es wird bewusst auf das sehr alte Design der 80386 zurückgegriffen, da es zuverlässig ist und sein Softwareverhalten ausführlich getestet und beschrieben ist.
Das Betriebssystem des Kunden stellt eine virtuelle Maschine für jeden Prozess zur Verfügung. Die Software des Autopiloten kontrolliert die Elektronik des Computers also immer über den Umweg und nie direkt, stattdessen steuert sie die Softwaresimulation, die auf der 80386-CPU abläuft.
Die meisten schwerwiegenden fehlerhaften Softwareoperationen führen zu einem Absturz des Systems - der jeweiligen CPU.
Meist läuft auf jeder CPU ein Prozess mit niedriger Priorität, der kontinuierlich den Computer testet. Prinzipiell läuft jeder Prozess im Autopiloten in identischer Form als Kopie an drei oder mehr Stellen in verschiedenen CPUs ab. Das System entscheidet dann, welche der Ergebnisse akzeptiert werden. Dabei wird der Mittelwert genommen, wobei extrem abweichende Werte verworfen werden.
Bei einigen Autopiloten kommt als zusätzliches Sicherheitsmerkmal noch ein unterschiedliches Design (engl. design diversity) hinzu. Dabei werden kritische Softwareprozesse nicht nur auf verschiedenen Computern ausgeführt, sondern auf jedem Computer läuft Software, die von verschiedenen Entwicklungsteams erstellt wurde, da es nicht sehr wahrscheinlich ist, dass verschiedenen Entwicklungsteam den gleichen Fehler machen. Wegen der Zunahme der Komplexität der Software und den steigenden Kosten für die Software rücken aber viele Entwicklungsfirmen von dieser Sicherheitsvorkehrung durch Diversität ab.
Stand der Technik und Ausblick
Bei modernen „Fly-by-Wire“-Systemen (Tornado, Airbus, F-16, Eurofighter) verschwimmen die Grenzen der einzelnen Systeme. Moderne, wegen ihrer Agilität instabil konzipierte Kampfflugzeuge, können ohne Rechnerunterstützung nicht mehr geflogen werden. Zusätzlich wird durch die implementierten Flugsteuerungssysteme eine Einhaltung des ‚Flight Envelopes‘ erzwungen. Eine Überschreitung der physikalischen Grenzen (Aerodynamik und auch strukturelle Belastungen) wird dadurch weitgehend unterbunden. Die Umsetzung von unbemannten Flugzeugen ist heute schon Realität. Allerdings scheitern diese Systeme an ihren ‚noch‘ recht eingeschränkten Einsatzmöglichkeiten. Spezielle Manöver (Aufklärung, Übernahme von einzelnen Flugphasen wie Cruise oder sogar die vollautomatische Landung) sind bei entsprechender Peripherie aber heute schon Stand der Technik. So ist bei vielen Fluggesellschaften die Nutzung des automatischen Landesystems sogar turnusmäßig vorgeschrieben. Diese Landungen fallen meist etwas härter aus.
Aber es gilt grundsätzlich: Eine sanfte Landung ist nicht zwangsläufig die bessere Landung!
Moderne Autopiloten
Heute werden größere Flugzeuge – vor allem beim Langstreckenflug – über die meiste Zeit vollautomatisch gesteuert. Computer gesteuerte Regel- und Messsysteme stabilisieren den Flug und wickeln ihn nach digitalen Flugplänen ab. Hierzu gibt der Pilot zum Beispiel die Luftstraße und die von der Flugsicherung zugewiesene Folge von Flughöhen in das Flight Management System ein.
Der Autopilot ändert dann am optimalen Punkt die Fluglage und leitet dort auch automatisch den Steigflug ein. Dabei werden die Anzeigen (bzw. die Daten) von digitalem Altimeter und Variometer (Höhenänderung), vom Kompass-System und Fahrtmesser optimal verarbeitet – und dem Flugzeug über die Steuerflächen und den Schubregler weitergeleitet. Ist dieser Knickpunkt der Flugroute ein Funkfeuer, so bewegt sich beim Überfliegen der Steuerknüppel wie von Geisterhand – und beginnt eine sanfte Kurve in den neuen Kurs. Bei alldem wird auf idealen Betriebszustand des Flugzeugs und seiner Triebwerke geachtet.
Zwar nimmt das System dem Piloten viele eintönige und oft wiederkehrende Arbeiten ab, doch soll er jederzeit den Flug und die Instrumente kontrollieren. Zum Beobachten des Luftraums und für kritische Situationen erhält er mehr Handlungsspielräume als früher.
In der Militärluftfahrt werden heute Autopiloten verwendet, die ein Abfangen aus einem unkontrolliertem Flugzustand auf Knopfdruck ermöglichen, so beim Eurofighter. Dies kann manchen Verlust an Mensch und Material verhindern helfen und erhöht zudem die Überlebenschance in einer Gefechtssituation.
Unbemannte Luftfahrt
Stark spürbar ist der Gewinn an Zeit, die der Pilot für die Fluglotsen hat. Doch gab es jahrelang Diskussionen, ob die Jets in Zukunft überhaupt noch einen Piloten bräuchten, oder ob man unbemannte Flugzeuge weitgehend erlauben sollte. Es wurde sogar behauptet, der Pilot sei der teuerste Passagier an Bord.
Der US-Kongress verlangt, dass ab 2015 mehr als ein Drittel der Kampfflugzeuge unbemannt sind.
Schiffe
.jpg) Autopilot an einem Schiff
Autopilot an einem SchiffAuch die automatischen Navigationsanlagen für Schiffe und Boote werden als Autopilot bezeichnet.
Siehe auch
Weblinks
Einzelnachweise
- ↑ Die Deutsche Luftfahrt, Band 20: Kurt Kracheel, Flugführungssysteme, Bernard&Graefe Verlag, Bonn 1993, ISBN 3-7637-6105-5

.jpg)


.jpg)
Wikimedia Foundation.