- Geschaltete Reluktanzmaschine
-
Ein Reluktanzmotor ist eine Bauform eines Elektromotors, bei dem der Rotor aus einem weichmagnetischen Material (z. B. Eisen) besteht und der Stator die Magnetspulen enthält.
Der Rotor ist weder mit Permanentmagneten bestückt noch bestromt. Er besitzt ausgeprägte Pole aus weichmagnetischem Material.
Inhaltsverzeichnis
Bauarten von Reluktanzmotoren
Man unterscheidet drei Arten von Reluktanzmotoren:
- Drehfeld-Reluktanzmotor:
- Der Drehfeld-Reluktanzmotor hat einen bewickelten mehrphasigen Stator (Ständer) wie eine Asynchronmaschine. Der Rotor (Läufer) ist aber nicht rund, sondern weist ausgeprägte Pole auf.
- Er wird meist zusätzlich wie eine Asynchronmaschine mit einem Kurzschlusskäfig ausgerüstet. Er läuft dann wie ein Asynchronmotor an bis in die Nähe der asynchronen Gleichgewichtsdrehzahl. Dann überwiegt der Reluktanzeffekt, und der Rotor dreht sich synchron mit dem Drehfeld. So lässt sich auf einfache und relativ preisgünstige Weise ein mit der Statorfrequenz synchron laufender Drehstrommotor bauen.
- Drehfeld-Reluktanzmotoren weisen als Nachteile gegenüber Synchronmotoren und Asynchronmotoren einen geringeren Wirkungsgrad, eine geringere Kraftdichte und einen hohen Blindleistungsbedarf auf.
- Geschaltete Reluktanzmaschine (kurz SRM, von englisch: switched reluctance motor):
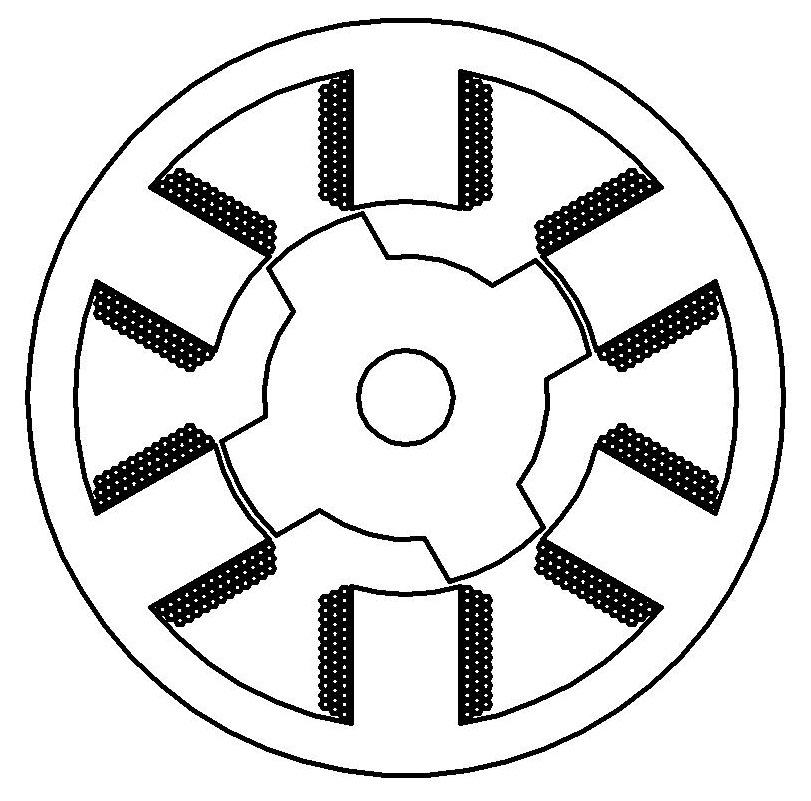
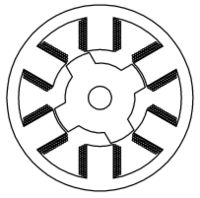 Schnitt durch einen geschalteten Reluktanzmotor
Schnitt durch einen geschalteten Reluktanzmotor- Ein Reluktanzmotor hat eine unterschiedlichen Anzahl ausgeprägter Zähne an Rotor und Stator. Die Statorzähne sind mit Spulen bewickelt, die abwechselnd ein- und ausgeschaltet werden. Die Zähne mit den bestromten Wicklungen ziehen jeweils die nächstgelegenen Zähne des Rotors wie ein Elektromagnet an und werden abgeschaltet, wenn (oder kurz bevor) die Zähne des Rotors den sie anziehenden Statorzähnen gegenüberstehen. In dieser Position wird die nächste Phase auf anderen Statorzähnen eingeschaltet, die andere Rotorzähne anzieht. Im allgemeinen hat ein geschalteter Reluktanzmotor drei oder mehr Phasen. Es gibt aber auch Sonderbauformen mit nur zwei oder einer Phase.
- Um im richtigen Zeitpunkt umzuschalten, wird die Maschine in der Regel mit einem Rotorlagegeber versehen. Es gibt aber auch geberlose Steuerverfahren. Eine Regelung ist mittels des Statorsstroms oder direkt über das Drehmoment möglich.
- Reluktanz-Schrittmotor
- Ein Reluktanz-Schrittmotor kann im Prinzip gleich wie ein geschalteter Reluktanzmotor aufgebaut sein. Er wird im Gegensatz zu diesem aber ohne Kenntnis der Rotorposition geschaltet, ist dadurch einfacher, aber weniger zuverlässig (Schrittverluste).
- Reluktanzmotoren dieser Bauart zeichnen sich durch hohe Robustheit und einen bescheidenen Beschaffungspreis aus. Wie Asynchronmaschinen bilden sie im unbestromten Zustand bei Drehung kein Drehmoment und keine Ummagnetisierungsverluste aus.
- Bei niedrigen Drehzahlen sind sie den Asynchronmaschinen bezüglich Drehmomentdichte überlegen, bei höheren deutlich unterlegen. Permanenterregten Synchronmaschinen sind sie diesbezüglich auf jeden Fall unterlegen.
Anwendungsbereiche
Anwendungsgebiete sind Hochgeschwindigkeitsmotoren, zum Beispiel auch als Fahrmotor in Elektroautos, weiterhin in Servoantrieben, zum Beispiel in der Textilindustrie zum synchronen Abspulen von Garn. Reluktanzmotoren eignen sich gut für mittelgroße Antriebe (Durchmesser von 100 bis 300 mm) mit geringen Einschaltzeiten. Für kleine Motoren scheiden sie wegen zu geringer Kraftdichte und zu geringen Wirkungsgrades aus, und für große wegen zu geringer Energieeffizienz und zu hohen Blindleistungsbedarfs. Zur Zeit sind Ausführungen bis zu 400 kW bekannt.
Geschaltete Reluktanzmotoren jedoch sind bezüglich Leistungsdichte und Wirkungsgrad den Asynchronmotoren ebenbürtig. Durch ihren einfachen und robusten Aufbau (z. B. keine Rotorwicklungen oder Magnete) sind sie sehr gut geeignet für den Betrieb in rauen Umgebungen und bei sehr hohen Rotordrehzahlen. Auf Grund besserer Steuerbarkeit durch moderne Leistungselektronik erobert sich der Reluktanzmotor zunehmend Anwendungsbereiche.
Vorteilhaft ist vor allem die kostengünstige Herstellung und relativ einfache Ansteuerung, nachteilig sind der wellige Drehmomentverlauf und die damit einhergehende relativ hohe Geräuschentwicklung.
Literatur
- Ernst Hörnemann, Heinrich Hübscher, Dieter Jagla: Elektrotechnik, Industrieelektronik. Westermann, Braunschweig 2001, ISBN 3-14-221730-4.
- Hans-Günter Boy, Horst Flachmann, Otto Mai: Elektrische Maschinen und Steuerungstechnik. In: Die Meisterprüfung. 4. Auflage. Vogel Verlag und Druck, Würzburg 1983, ISBN 3-8023-0725-9.
- Fachkunde Elektrotechnik. In: Europa-Fachbuchreihe: Für elektrotechnische Berufe. 18. Auflage. Verl. Europa-Lehrmittel, 1989, ISBN 3-8085-3018-9.
Weblinks
Wikimedia Foundation.