- HOJ
-
Der Ausdruck Betriebsmodus definiert bei Radargeräten ein spezielles Signalprofil, welches für eine bestimmte Aufgabe (z. B. Suche nach Luftzielen oder Erfassung von Schiffen auf See) optimiert ist. Die wichtigsten Parameter in diesem Profil sind Sendefrequenz, Impulsleistung, Impulsfolgefrequenz (PRF) und Impulslänge. Besonders luftgestützte Radare verfügen über eine große Zahl von Betriebsmodi, meist über 15 Stück, da sie eine Vielzahl von möglichen Zielen bekämpfen müssen, während spezialisierte Geräte wie Such- oder Feuerleitradare mit deutlich weniger Modi auskommen. Moderne Systeme wechseln in Abhängigkeit von der aktuellen Situation und Aufgabe meist halb- oder vollautomatisch in den optimalen Betriebsmodus, während ältere Radare (wie z. B. das der frühen MiG-29) eine intensive Bedienung durch den Piloten erfordern.
Betriebsmodi
Im folgenden werden einige typische und häufig angewandte Betriebsmodi erläutert.
Anmerkung: Die Bezeichnung vieler Betriebsmodi variiert oft je nach Hersteller, da eine Standardisierung der Bezeichnungen fehlt. Außerdem werden oft kleine Änderungen an üblichen Modi mit einer neuen, aber meist ähnlichen Bezeichnung versehen.
Luft-Luft-Modi
Pulse search
Dient der genauen Bestimmung der Zielentfernung und des Winkels zum Ziel, meist genau ein einzelner Impuls. Mittels mehrerer hintereinander gesendeter Impulse kann auch die Geschwindigkeit des Zieles ermittelt werden, diese lässt sich aber besser mittels Auswertung des Dopplereffekts ermitteln, weshalb meist nur ältere Radargeräte diesen Modus verwenden.
Track while scan (TWS)
In diesem Modus können mehrere Ziele in einem Antennendurchgang sicher verfolgt werden, während das Radar gleichzeitig nach neuen Zielen sucht. Durch dieses Verfahren wird die Signalverarbeitung stark beansprucht, weshalb viele frühe Radare diesen Modus nicht zur Verfügung stellen konnten. Die ersten TWS-fähigen Radare konnten meist 5 bis 10 Ziele gleichzeitig verfolgen, moderne Systeme auf Basis von Phased-Array-Antennen und leistungsfähigen Computerkomponenten können ca. 20 bis 30 Kontakte simultan verfolgen.
Range while search
Dieser Modus bestimmt lediglich die Entfernung zum Ziel, bietet allerdings eine sehr hohe Reichweite. Ähnelt dem „Pulse search“-Modus, allerdings befindet sich das Radar ununterbrochen im Suchmodus.
Velocity search
Ebenfalls ein Modus mit großer Reichweite, arbeitet mit einer sehr hohen Impulsfolgefrequenz. Bestimmt allerdings nur Winkel und Geschwindigkeit des Zieles.
Raid assessment
Die Umgebung eines erfassten Zieles wird intensiv mit sehr kurzen Impulsen abgesucht, um eventuell verborgene Ziele innerhalb einer engen Formation zu erfassen.
Single target track (STT)
Das Radar richtet seine gesamte Energie und Rechenkapazität kontinuierlich auf ein Ziel, wodurch sehr genaue Geschwindigkeits-, Winkel- und Entfernungswerte ermittelt werden können. Dies ist zum Beispiel nötig, wenn semi-aktive Lenkwaffen wie die AIM-7 Sparrow eingesetzt werden sollen, die eine dauerhafte Zielbeleuchtung benötigen. Im Luftnahkampf (engl. „dogfight“) wird der Pilot mit einer Zielhilfe unterstützt.
Slaved on external demand
In diesem Modus wird das Radar an das Helmvisier des Piloten gekoppelt, so dass dessen Blickrichtung die Radarantenne ausrichtet. Dies ist insbesondere bei Luftnahkämpfen von Vorteil.
Dogfight
Für den Luftnahkampf gibt es eine Vielzahl von Modi mit ebenfalls vielfältiger Benennung. Diese Modi bieten meist eine Zielhilfe für den Einsatz der Bordkanone und der Kurzstreckenlenkwaffen. Oft wird auch ein schmaler horizontaler und/oder vertikaler Bereich durchsucht, um schnell durchfliegende Ziele zu erkennen und dem Piloten so eine bessere Orientierung zu verschaffen.
Non cooperative target identification (NCTI)
Dieser Modus dient der Identifizierung von Zielen, die nicht auf eine IFF-Abfrage reagieren und sich außerhalb der Sichtweite des Piloten befinden (engl. „Beyond Visual Range“). Hierzu sind meist nur moderne Radargeräte in der Lage, da dieses Verfahren auf der hochgenauen Analyse des Radarechos beruht, was hohe Anforderungen an die Signalverarbeitung stellt. Das Kernmerkmal bei dieser Analyse ist das Radarecho der Verdichterschaufeln, wobei deren Anzahl, sowie ihre Drehgeschwindigkeit Aufschluss über das verwendete Triebwerk gibt und damit wieder Rückschlüsse auf den Flugzeugtyp erlaubt.
Eine Besonderheit stellt das AN/APG-77 der F-22 Raptor dar. Es verwendet ein extrem hochauflösendes, bildgebendes Verfahren, welches ein Ziel anhand der Form seiner Flugzelle identifiziert und ist somit nicht auf eine direkte Sicht auf die Verdichterschaufeln angewiesen. Dieses hochaufwändige Verfahren ist allerdings nur mit neusten AESA-Antennen und sehr großen Rechenkapazitäten zuverlässig einsetzbar.
Low Probability of Intercept (LPI)
Dieser Modus soll die Erfassung der ausgesendeten Radarstrahlen durch feindliche Radarwarnanlagen verhindern oder zumindest verzögern. Hierzu werden alle Parameter der gesendeten Impulse in sehr schneller Folge geändert, damit das feindliche Warngerät kein Muster erkennen kann und somit keinen Alarm gibt. Allerdings sind enorme Rechenkapazitäten notwendig, da es auch für das sendende Radar schwierig ist, eigene Impulse von Hintergrundrauschen und anderen natürlichen Störungen zu unterscheiden. Somit ist die Effektivität dieses Modus stark an die Verarbeitungskapazität der Signalverarbeitung gekoppelt. Eine Form der LPI-Technik ist die Bandspreizung, hier wird der Sendeimpuls über eine große Bandbreite verteilt. Hierdurch verschlechtert sich der Signalrauschabstand bei Radarwarnempfängern und leider auch die Reichweite des Radargeräts. Auch wird ständig die Leistung des Radars angepasst, das kann schon Radarwarner irritieren. Eine Leistungserhöhung wird von den meisten Radars als ein näherkommendes Radar interpretiert und im Gegenzug eine Leistungsverringerung als entfernen. Es wird versucht eine möglichst hohe Nebenkeulendämpfung zu erreichen, da Nebenkeulen zu einem Ansprechen des Radarwarnempfängers führen kann. Auch wird Pulskompression eingesetzt, ohne genaue Kenntnis der Signalform ist eine Detektion kaum möglich, weil das Signal praktisch im Rauschhintergrund untergeht. Deshalb spricht man auch von „Silent-Radar“ also stillen Radar. Das Pulskompressionsverfahren ermöglicht lange Sendeimpulse mit guter Entfernungsauflösung und geringer Impulsleistung. Die langen Sendeimpulse begrenzen jedoch die minimale messbare Entfernung, denn solang man sendet, kann man nichts empfangen, weshalb man zwischenzeitlich kurze Sendeimpulse (geringe Sendeenergie) verwenden muss, damit man Ziele im Nahbereich erfassen kann, was im Gegenzug wieder Radarwarner irritieren kann. [1]
home-on-jam (HOJ)
Dieser Betriebsmodus (abgekürzt: HOJ) wird ausschließlich von Lenkflugkörpern verwendet, um Elektronische Gegenmaßnahmen zu umgehen. Sobald der Suchkopf ein feindliches Störsystem wahrnimmt, welches die Führung durch das eigene Radarsystem unmöglich macht, schaltet dieser in einen passiven Modus um, der die Quelle des Störsignals erfasst und anfliegt. Hierdurch ist es auch niedrig entwickelten Lenkwaffen möglich leistungsfähige Störsysteme wirkungsvoll zu umgehen.
Im Gegensatz zum aktiven Radareinsatz kann in diesem Modus allerdings weder die Geschwindigkeit noch die Entfernung oder der genauen Kurs des Zieles ermittelt werden. Hierdurch kann die Elektronik des Lenkflugkörpers keine optimale Flugbahn oder einen Vorhaltepunkt errechnen, wodurch die Trefferwahrscheinlichkeit besonders gegen agile Kampfflugzeuge wie zum Beispiel die F-15 oder die MiG-29 stark sinkt.
Ein weiteres Problem ist die Reaktionszeit der Elektronik, da alle modernen Störsysteme ihre Gegenmaßnahmen einstellen, sobald der Suchkopf der Lenkwaffe abgeschaltet wird, wodurch dieser sofort sein Ziel verliert. Daraufhin wird wieder das Radarsystem aktiviert, welches einen gewisse Zeit benötigt um wieder auf das Ziel aufzuschalten. Dies wird wiederum von dem Gegenmaßnahmensystem registriert, welches diese Zielaufschaltung zu stören versucht. Wenn das EloGM-System also über besser Reaktionszeiten verfügt als die Elektronik des Lenkflugkörpers, kann dieser sein Ziel nicht mittels des HOJ-Modus bekämpfen. Selbst wenn der Suchkopf über bessere Reaktionszeiten verfügt, so führt diese Kaskade von Maßnahmen und Gegenmaßnahmen zu einer instabilen Zielerfassung, was wiederum zu einer ineffizienten Flugbahn und einer geringeren Trefferwahrscheinlichkeit führt. Diese Ineffizienz steigert sich auch hier analog zur Wendigkeit des Zieles.
EloGM-Systeme der neuesten Generation (z. B. das AN/ALQ-214) verfügen über geschleppte Störsysteme, welche den HOJ-Modus fast vollständig neutralisieren, da diese nicht mehr das eigentliche Ziel anfliegen können, sondern nur die in einiger Entfernung geschleppte Störsonde.
Trotz dieser Einschränkungen bleibt der HOJ-Modus weiterhin ein effektives Mittel, um träge Ziele unter EloGM-Einfluss zu bekämpfen, da deren geringe Geschwindigkeit die Problematik von ineffektiven Flugbahnen deutlich reduziert.
Luft-Boden-Modi
 Ein GMTI-Bild, welches mit einem SAR-Bild kombiniert ist (stammt von einer E-8 Joint STARS)
Ein GMTI-Bild, welches mit einem SAR-Bild kombiniert ist (stammt von einer E-8 Joint STARS)Sea modes
Diese Modi dienen der Erfassung von Seezielen und sind auf die Unterdrückung von See-Cluttern spezialisiert. Hierzu werden sehr kurze Sendeimpulse verwendet.
Ground moving target indication and tracking
Um auch Bodenziele zuverlässig angreifen zu können, wertet dieser Modus auch sehr geringe Frequenzverschiebungen (Dopplereffekt) aus, da sich bewegende Fahrzeuge aufgrund ihrer geringen Geschwindigkeit nur einen sehr geringen Dopplereffekt hervorrufen. Kernelement ist die MTI-Signalverarbeitung.
Ground mapping
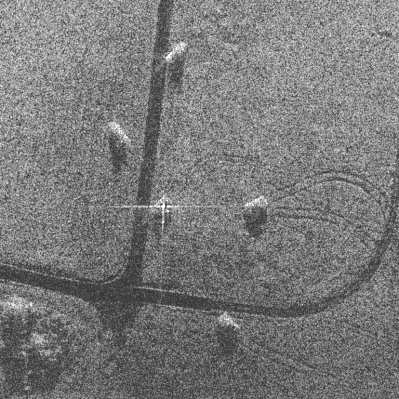
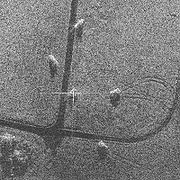 SAR-Bild eines modernen Radars (AN/APG-81). Zu sehen sind 5 Fahrzeuge sowie deren Fahrspuren und eine Straße
SAR-Bild eines modernen Radars (AN/APG-81). Zu sehen sind 5 Fahrzeuge sowie deren Fahrspuren und eine StraßeDieser Modus (welches sich der SAR-Technik bedient) erstellt eine Bodenkarte des Zielgebietes. Anfänglich waren nur sehr grobe Karten möglich, auf denen nur große Landschaftsmerkmale wie Berge oder Flüsse zu erkennen waren. Heutzutage sind durch das sogenannte „Doppler Beam Sharpening“-Verfahren, welches zusätzlich noch den Dopplereffekt auswertet, und moderne Radarkomponenten Auflösungen von unter einem Meter möglich, wodurch viele Ziele, die durch den MTI-Modus erfasst wurden, anhand ihrer Form identifizierbar sind.
Terrain avoidance
Dieser Modus ist sehr einfach zu implementieren und sucht nach Hindernissen, welche sich auf der Flugbahn des Flugzeuges befinden. Dieser Modus wird vorwiegend bei Tiefflug-Missionen eingesetzt, wobei die Kombination von präzisen digitalen Karten und GPS diesen Betriebsmodus zunehmend ablöst.
Precision velocity update
Ebenfalls ein heutzutage kaum mehr gebrauchter Modus. Er misst sehr genau die Geschwindigkeit über Grund, wodurch es möglich ist die Ungenauigkeit des Inertiale Navigationssystems bis zu einem gewissen Grad auszugleichen. Seit der breiten Einführung von GPS kaum mehr in Gebrauch.
Air-to-surface ranging
Dieser Modus liefert eine sehr genaue Entfernungsmessungen zu festgelegten Orten am Boden. Dies ist unter anderem für einen präzisen Bombenabwurf nötig, zum anderen können Ungenauigkeiten im Navigationssystem ausgeglichen werden.
Einzelnachweise

Wikimedia Foundation.