- Hexapod-Montierung
-
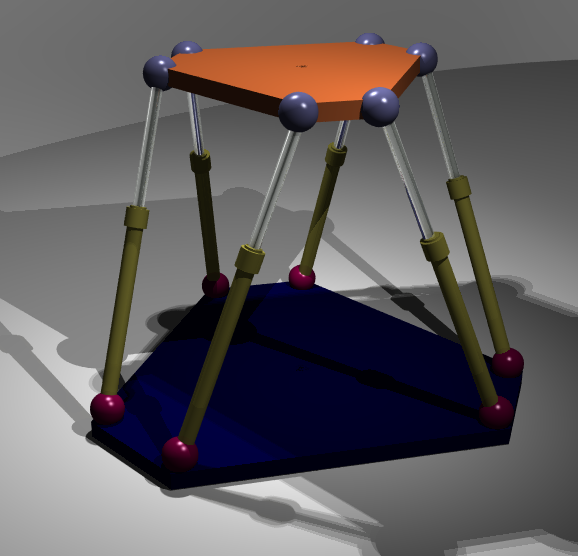
 Eine mögliche Konfiguration eines Hexapods
Eine mögliche Konfiguration eines Hexapods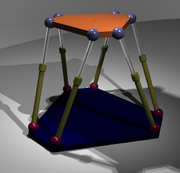 Hexapod
Hexapod Einsatz bei Flugsimulatoren
Einsatz bei Flugsimulatoren Zwei Hexapoden
Zwei HexapodenEin Hexapod (Hexa griech.: Sechs, pod griech.: Fuß) ist eine räumliche Bewegungs-Maschine mit sechs Antriebselementen.
Inhaltsverzeichnis
Allgemein
Ein Hexapod ist eine spezielle Form einer Parallelkinematikmaschine, die über sechs Beine veränderlicher Länge verfügt. Diese Konstruktion ermöglicht eine Beweglichkeit in allen sechs Freiheitsgraden (drei translatorische sowie drei rotatorische). Durch die parallele Anordnung der Antriebe besitzen Hexapode verglichen mit seriellen Robotern ein besseres Verhältnis von Nutzlast zu Eigengewicht.
Bis vor wenigen Jahren herrschte die Meinung, das Konzept des Hexapods sei zuerst von D. Stewart im Jahr 1965 vorgestellt worden. Daher rührt auch die verbreitete Bezeichnung Stewart-Plattform. Eine andere Veröffentlichung zum Thema ist jedoch wesentlich älter und stammt von Dr. Eric Gough, weshalb der Hexapod inzwischen auch als Stewart/Gough-Plattform bezeichnet wird. Dr. Eric Gough soll den ersten Hexapoden bereits in den 50er Jahren gebaut haben. Ein weiterer Name im Zusammenhang mit der Entwicklung des Hexapoden ist Klaus Cappel, der im Jahr 1962 seinen ersten Hexapoden baute.[1]
Einsatz
In verschiedenen Konfigurationen kommen Hexapode regelmäßig für besondere Zwecke zum Einsatz:
- Aktuatorischer Antrieb von Fahr- und Flugsimulatoren
- Montierung von Teleskopen, siehe Hexapod-Teleskop
- in der Robotik
- in der Medizintechnik, siehe Taylor Spatial Frame
Besonders bei Bewegungssimulationen ist die hohe Dynamik und die besonders einfache Statik von Hexapoden eine ideale Konstruktion.
Anwendungsforschung
Wegen der besonderen Kinematik (Parallelkinematik) ist das Konstruktionsprinzip von Hexapoden grundsätzlich sehr interessant für den Einsatz bei Robotern, bzw. speziellen Industrierobotern und Werkzeugmaschinen. Entsprechende gibt es von vielen Herstellern sowie in der Grundlagenforschung seit über 20 Jahren Forschungsprojekte besonders bei entsprechenden Werkzeugmaschinen. Bis heute gibt es aber keinen nennenswerten Einsatz in der Produktion, die traditionell von Maschinen mit serieller Kinematik dominiert wird.
Der Grund dafür liegt in der Abwägung der speziellen Vor- und Nachteile:Vorteile:
- Hohe Dynamik und geringe bewegte Massen. Daraus folgen hohe Beschleunigungen und Endgeschwindigkeiten (Eilgang) und entsprechend eine etwas schnellere Werkstückbearbeitung bzw. -Manipulation.
- Positioniergenauigkeit ist bei einer Parallelkinematik grundsätzlich besser, da sich Positionsfehler der Achsen nicht wie bei einer serieller Kinematik aufeinander aufsummieren sondern nur zu einem Bruchteil der Gesamtbewegung wirken.
- Hohe Beweglichkeit. Der Freiheitsgrad des Werkzeugs bzw. der Werkzeugaufnahme erreicht fast kugelförmig 5-Seiten. Allerdings erreichen traditionelle Maschinen mit serieller Kinematik heute, bei gleichzeitiger Verwendung von schwenkbaren Werkzeugköpfen und drehbaren Spanntischen, einen vergleichbar hohen Freiheitsgrad.
Nachteile:
- Durch die räumliche Aufspannung der Hexapodenkonstruktion ergibt ein Einsatz bei Robotern, im Vergleich zur häufigsten Bauform als vielgelenkiger, einzelner Arm (z.B. KUKA Roboter), eine sehr eingeschränkte Beweglichkeit zwischen und besonders auch in anderen Maschinen (z.B. Entnahme eines Schmiedewerkstücks aus einer Presse). Aus dem gleichen Grund benötigt eine Hexapodenkonstruktion bei Werkzeugmaschinen einen im Vergleich erheblich größere Aufstellfläche (Kostenfaktor).
- Höherer Steuerungsaufwand (Software & Hardware) durch die komplexere Kinematik (6 immer gleichzeitig aktive Vorschubbaugruppen).
- Die geringere Massen der Konstruktion bedingt eine wesentlich höhere Schwingungsanfälligkeit, die besonders bei spanender Bearbeitung generell sehr unerwünscht ist (Rauigkeit).
- Konstruktionsbedingte Empfindlichkeit bzw. ein entsprechend hoher Verschleiß der meist sehr teuren Vorschubbaugruppen, da Hydraulikzylinder bzw. Kugelrollspindeln nicht für die bei Hexapoden konstruktionsbedingt auf sie wirkenden Kräfte geeignet sind (echte massive Führungen vs. virtuelle (bzw. "Missbrauch" der Vorschubbaugruppen als Führung)).
- Höhere thermische Belastung der Messsysteme, die bei einer Konstruktion mit serieller Kinematik üblicherweise geschützt, außerhalb des Arbeitsraums, in oder hinter den Führungen verborgen sind. Bei Hexapoden wäre eine entsprechende schützende Konstruktion zu aufwendig bzw. sie würde die Vorteile der Hexapoden-Konstruktion (Hohe Dynamik, Hohe Beweglichkeit) aufheben.
Siehe auch
Literatur
- D. Stewart: A Platform with Six Degrees of Freedom, UK Institution of Mechanical Engineers Proceedings 1965-66, Vol 180, Pt 1, No 15.
- Gough, V.; Whitehall, S.: Universal Tyre Test Machine. Proc. of the IX Int. Techn. Congr. F.I.S.I.T.A., 1962.
- J.-P. Merlet: Parallel Robots, Kluwer Academic Publishers 2000, ISBN 0792363086
Einzelnachweise
- ↑ The True Origins of Parallel Robots Copyright © 2000–2003 by Ilian Bonev, Published on: January 24, 2003
Weblinks
- Arbeitsvideo einer OKUMA PM-600V Hexapod Fräsmaschine
- Video eines Eigenbau-Hexapoden
- Umfangreiche Übersicht zu den verschiedenen Varianten der Parallelkinematiken
- Freies Hexapod-Projekt beim Laboratory for Micro Enterprise
- Hexapod für micropositioning von SYMETRIE - frankreich (Universität Kairo)
- Freie Software-CNC für Hexapoden, inklusive Kalibrierung. Lizenz: GPL
- Hexapod-Industrieroboter der Firma FANUC
- Abhandlung zum Hexapod (Universität Kairo)
- Diplomarbeit - Pneumatik basierte Stewart Platform
- Taylor Spatial Frame Hexapodfixateur zur Behandlung von Deformitäten


Wikimedia Foundation.