- HiRISE
-
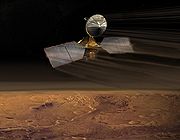
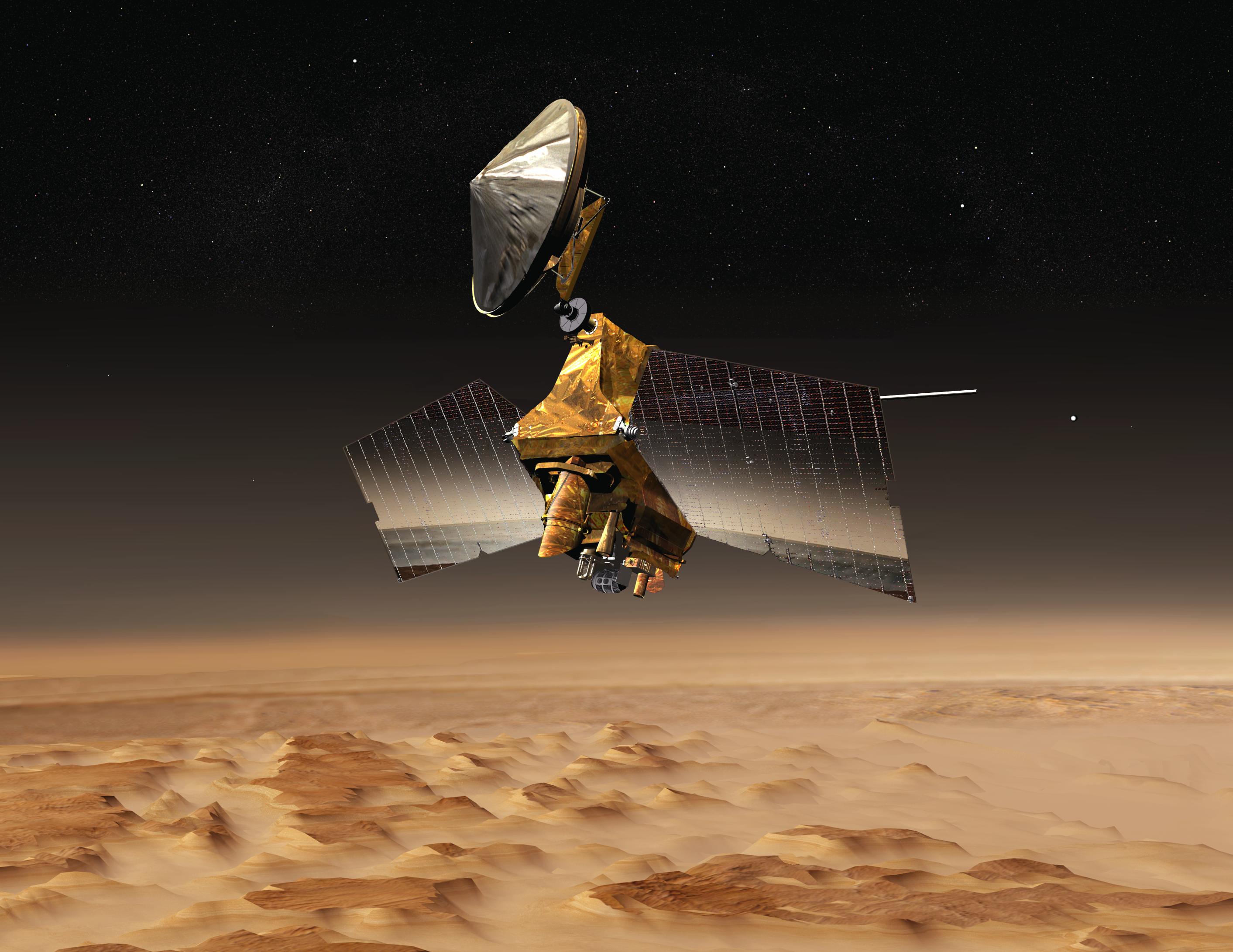
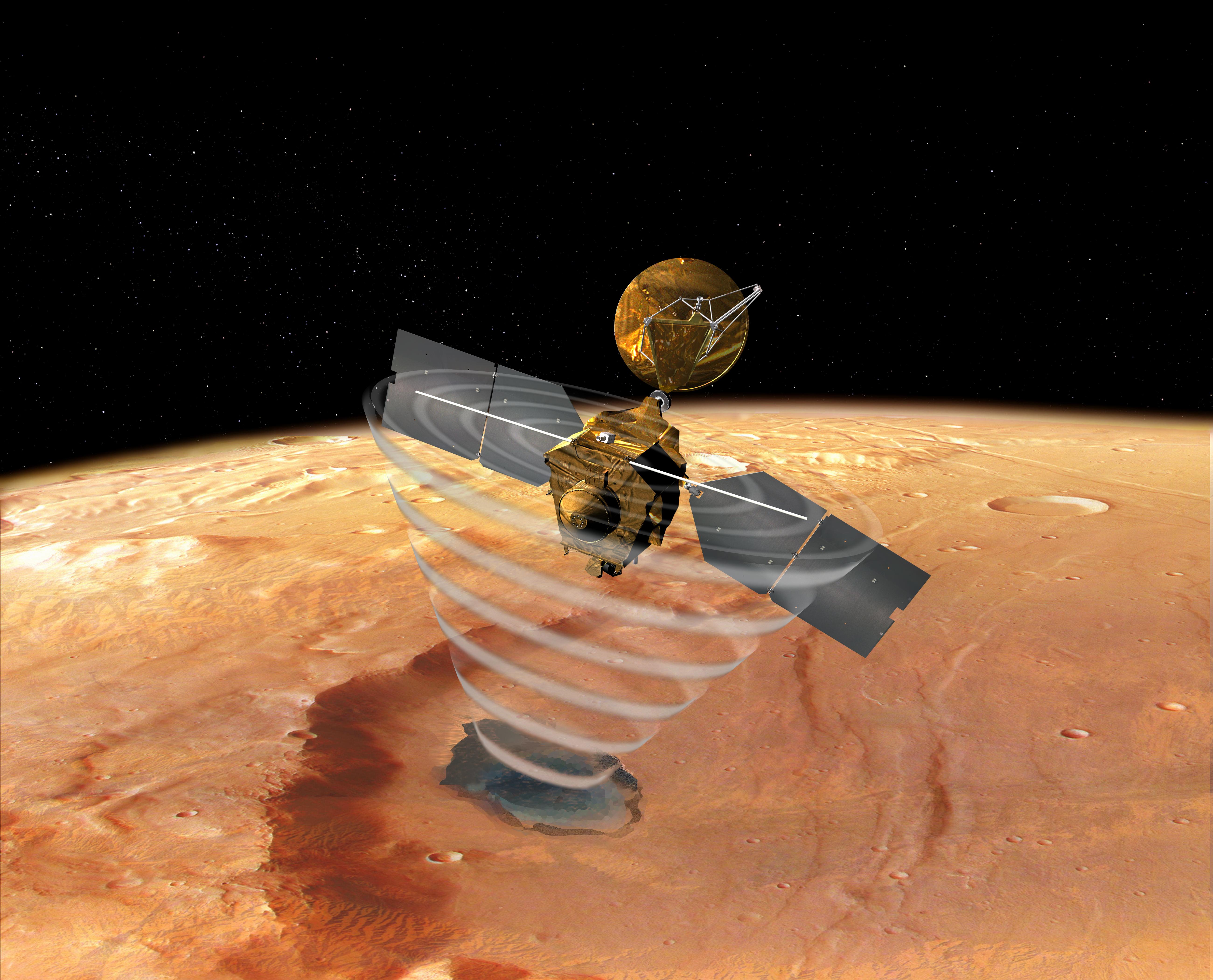
 Mars Reconnaissance Orbiter in einem Mars-Orbit (künstlerische Darstellung)
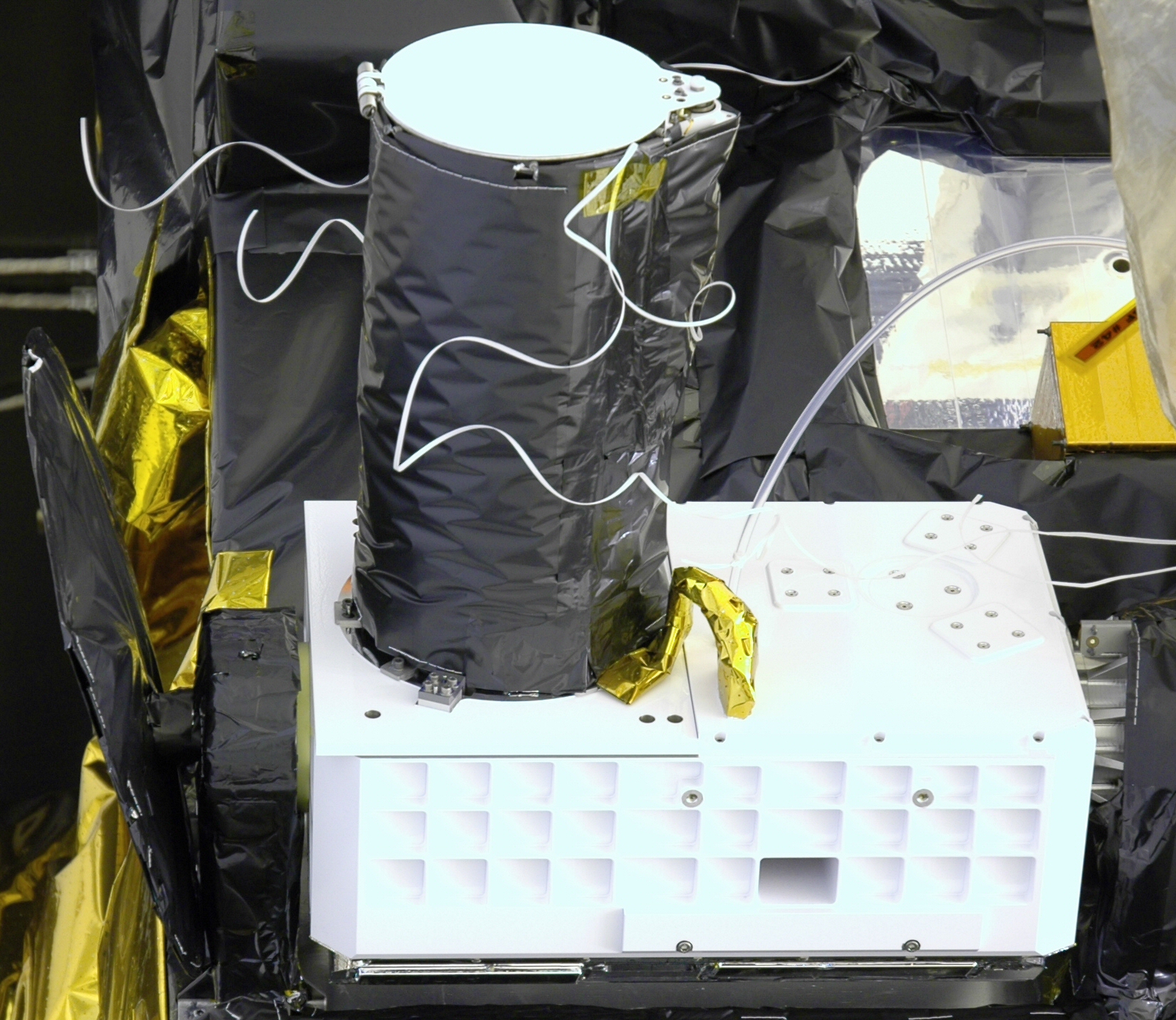
Mars Reconnaissance Orbiter in einem Mars-Orbit (künstlerische Darstellung) MRO in der Montagehalle kurz vor dem Start, eingewickelt in MLI-Folie
MRO in der Montagehalle kurz vor dem Start, eingewickelt in MLI-FolieDer Mars Reconnaissance Orbiter (engl. für „Mars-Erkundungssatellit“), abgekürzt MRO, ist eine NASA-Raumsonde zur Erforschung des Planeten Mars, die am 12. August 2005 zum Roten Planeten aufgebrochen war und am 10. März 2006 ihr Ziel erreichte. Dies ist vorerst der letzte Orbiter, der zum Mars geschickt wurde, da die Mars-Missionen der nächsten Jahre alle auf der Planetenoberfläche landen werden. Die Sonde ist von Lockheed Martin gebaut worden; die meisten Instrumente stammen vom Jet Propulsion Laboratory (JPL). Die Sonde ist seit den Viking-Sonden von 1975 die schwerste US-amerikanische Mars-Sonde, die zudem über eine sehr umfangreiche Instrumentierung verfügt. Beim Start wog sie (mit Antrieb und Treibstoff) über 2 Tonnen. Die Gesamtkosten der Mission betragen etwa 720 Millionen US-Dollar, davon entfallen 450 Millionen auf die Entwicklung und die Herstellung der Sonde und ihrer Instrumente, 90 Millionen auf die Trägerrakete sowie 180 Millionen auf die Missionsdurchführung der 5,5 Jahre lang dauernden Primärmission.
Mit MROs Ankunft am Mars waren dort zusammen mit Mars Global Surveyor, Mars Odyssey und Mars Express erstmals vier Orbiter gleichzeitig aktiv.
Inhaltsverzeichnis
Missionsziele
Das primäre Ziel der Sonde ist die Kartografierung der Mars-Oberfläche: Der Mars Reconnaissance Orbiter bringt die bisher hochauflösendste Kamera in eine Mars-Umlaufbahn. Sie erreicht eine verbesserte horizontale Bildauflösung von einem Meter pro Pixel, während frühere Aufnahmen noch mehrere Meter pro Pixel hatten. Wegen der Begrenzung der Datenmenge, die zur Erde übermittelt werden kann, können nur ausgewählte Teile des Planeten mit der höchsten Auflösung erfasst werden.
Die Aufnahmen sollen auch kleinere geologische Strukturen erkennen lassen, z. B. hydrothermale Quellen, in deren Nähe (fossiles) Leben vermutet wird. Sie ermöglichen damit auch eine gezieltere Auswahl interessanter Landestellen für weitere Mars-Missionen, wie für die am 25. Mai 2008 am Mars angekommene Phoenix-Sonde und das Mars Science Laboratory im Jahr 2010.
Weiterhin sucht der MRO mit Radar nach dicht unter der Mars-Oberfläche vorhandenem Wasser und Eis, insbesondere auch an den Polkappen. Schließlich soll die Sonde für zukünftige Landemissionen als Relaisstation dienen.
Technik
Ursprünglich sollte der Mars Reconnaissance Orbiter mit einer Atlas-III-Rakete gestartet werden und eine Startmasse von 1.975 kg haben [1]. Doch nachdem die neuere Atlas-V-Rakete 2002 ihren Erstflug erfolgreich absolviert hatte, entschied man sich dafür, die Sonde mit ihr zu starten, da sie zum Preis einer Atlas III mehr Nutzlast erlaubt. Dadurch stieg die Startmasse der Sonde auf 2.180 kg, wobei die Leermasse der Sonde 1.031 kg beträgt (davon sind 139 kg Instrumente) und 1.149 kg auf den mitzuführenden Treibstoff entfallen. Die tragende Struktur der Sonde ohne jegliche Geräte wiegt 220 kg und besteht aus leichten aber festen Werkstoffen wie Titan, Kohlenstofffaser-Verbundwerkstoffen und Aluminium in Honigwabenbauweise. Die Struktur muss Startbeschleunigungen von 5 g standhalten können, was dem fünffachen Eigengewicht der Sonde (also 10.900 kg) entspricht.
Energieversorgung
 Solarkollektoren des MRO in der Montagehalle
Solarkollektoren des MRO in der MontagehalleDie Stromversorgung des Orbiters erfolgt allein durch zwei jeweils 5,35 m lange und 2,53 m breite Solarkollektoren. Die Solarkollektoren können unabhängig voneinander sowohl auf- und abwärts bewegt, als auch um die eigene Achse rotiert werden. Auf der Vorderseite jedes Kollektors sind 9,5 m2 Fläche jeweils mit 3.744 einzelnen Solarzellen bedeckt. Die sehr effizienten triple-junction-Solarzellen haben einen Wirkungsgrad von 26 %, d. h. sie können 26 % der Energie des einfallenden Sonnenlichts in Elektrizität umwandeln. Die Solarzellen sind so angeschlossen, dass sie eine konstante Spannung von 32 V liefern, auf die die Instrumente der Sonde ausgelegt sind. Die gesamte Energieausbeute der beiden Solarkollektoren im Mars-Orbit beträgt rund 2.000 Watt (im Erdorbit läge die Energieausbeute aufgrund der geringeren Distanz zur Sonne bei 6.000 Watt).
Der Mars Reconnaissance Orbiter führt zwei wiederaufladbare Nickel-Metallhydrid-Akkumulatoren mit einer Kapazität von je 50 Amperestunden an Bord. Die Akkumulatoren werden zur Stromversorgung während der Flugphasen genutzt, in welchen die Solarkollektoren keine elektrische Energie liefern. Dies geschieht beispielsweise beim Start, beim Einschwenken in die Marsumlaufbahn, bei den Aerobraking-Manövern oder wenn die Sonde in den Mars-Schatten eintritt. Da die zur Verfügung stehende Spannung mit dem fortschreitenden Entladen der Akkumulatoren fällt und sich der Bordcomputer bei einem Absinken der Spannung auf etwa 20 V abschaltet, kann die Sonde nur etwa 40 % der Akkukapazität nutzen.
Elektronik
Das Herz des MRO-Bordcomputers ist ein 133 MHz schneller, aus 10,4 Millionen Transistoren bestehender, 32-bit-RAD-750-Prozessor. Der Prozessor ist im Grunde ein gegen Strahlung gehärteter PowerPC-750 G3 und ist der Nachfolger des RAD6000-Prozessors, der beispielsweise in den Mars-Rovern Spirit und Opportunity Verwendung findet. Obgleich die Geschwindigkeit des Prozessors mit 133 MHz im Vergleich zu heutigen Home-PCs als sehr niedrig erscheint, ist das zur Zeit der schnellste Prozessor, der - fernab des Schutzes des Magnetfeldes und der Atmosphäre der Erde - noch zuverlässig arbeiten kann.
Zur Datenspeicherung verfügt der MRO über 20 GByte, die auf mehr als 700 einzelne Flash-Speicherchips mit einer Kapazität von je 256 Mbit (= 32 MByte) verteilt sind. Die Speicherkapazität der Sonde ist im Vergleich zu einem Bild der HiRISE-Kamera, das bis zu 3,5 Gbyte groß sein kann, nicht besonders hoch.
Der Bordcomputer setzt ein VxWorks-Echtzeitbetriebssystem ein, das für seine Schnelligkeit und Zuverlässigkeit bekannt ist und bereits in vielen Raumfahrtmissionen, wie z. B. in Spirit und Opportunity, zum Einsatz kam.
Kommunikation
 Richtantenne des MRO
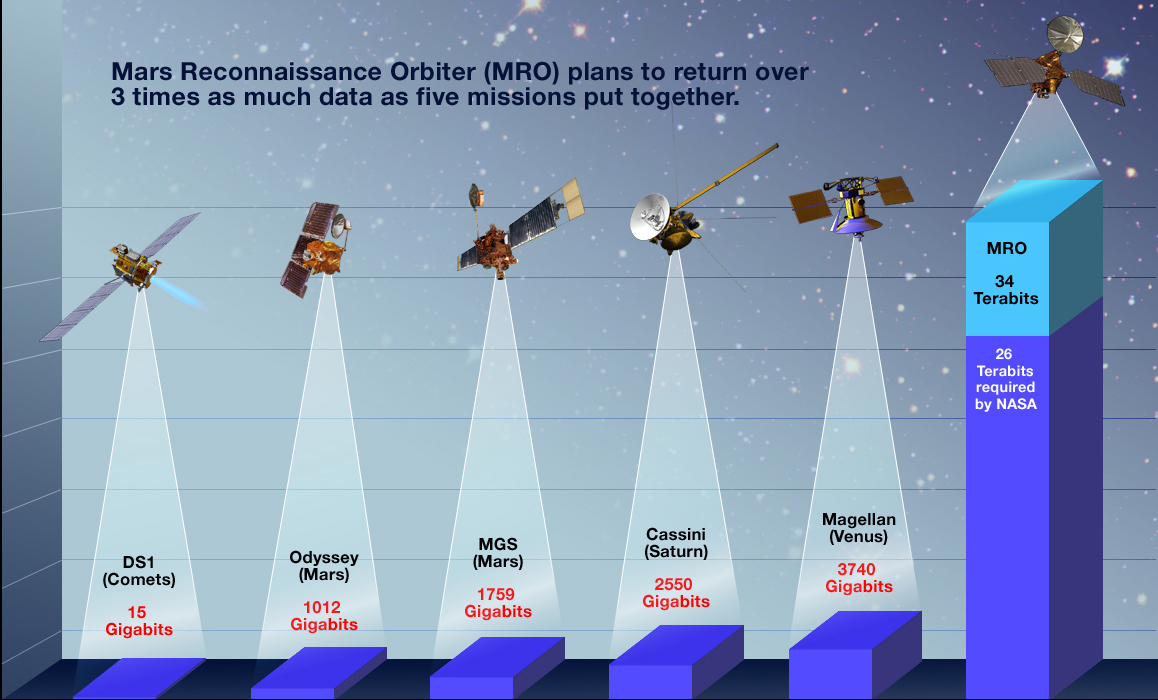
Richtantenne des MROZur Kommunikation mit der Erde verfügt der MRO über eine Richtantenne (High-Gain-Antenna – HGA) mit einem Durchmesser von drei Metern, mit der Datenübertragungsraten von bis zu 6 MBit/s erreicht werden können. Die Antenne ist beweglich und kann punktgenau auf die Erde ausgerichtet werden. Die Sonde sendet im X-Band auf einer Frequenz von 8 GHz mit einer Leistung von 100 Watt, außerdem ist eine experimentelle Kommunikation im Ka-Band mit 32 GHz und 35 Watt geplant. Mit der höheren Sendefrequenz kann eine höhere Datenübertragungsrate erreicht werden. Sollte sich die Kommunikation im Ka-Band bewähren, werden zukünftige Raumsonden mit der neuen Übertragungstechnologie ausgestattet. Die Sonde verfügt über zwei Verstärker für das X-Band (der zweite ist für den Fall, dass der erste versagt) und einen Verstärker für das Ka-Band. Nach dem Ende der primären Mission sollen mit der Antenne etwa 34 Terabit an wissenschaftlichen Daten zur Erde übertragen worden sein (dies ist mehr, als die Datenmenge aller bisherigen planetaren Raumsonden zusammen), wobei pro Tag rund 10-11 Stunden lang Datenübertragung mit einer durchschnittlichen Datenrate von 0,6 bis 5 Mbit/s (abhängig von der Entfernung Erde-Mars) stattfindet. Der Empfänger auf der Erde ist eine 34-m-DSN-Antenne. Zum Vergleich: Die Sender auf MGS und Odyssey hatten/haben eine elektrische Leistung von 25/15W und eine Datenübertragungsrate von 20-80/14-120 kbit/s - mehr als eine Größenordnung weniger als MRO.
 Datenmenge des MRO im Vergleich zu früheren NASA-Raumsonden
Datenmenge des MRO im Vergleich zu früheren NASA-RaumsondenFür den Fall, dass die Richtstrahlantenne nicht eingesetzt werden kann, verfügt der MRO über zwei Niedrigverstärkungsantennen (Low-Gain-Antenna – LGA). Die Antennen befinden sich auf der HGA-Schüssel, eine auf der Vorderseite und eine auf der Rückseite. Um mit der Erde zu kommunizieren, brauchen die Niedrigverstärkungsantennen nicht darauf ausgerichtet zu werden, erreichen dafür aber auch nur niedrige Datenraten. Da die Sonde über zwei dieser Antennen verfügt (jeweils eine deckt eine volle Halbkugel ab), kann sie aus einer beliebigen Lage Signale sowohl senden als auch empfangen. Die Antennen werden während des Starts und beim Eintreten in die Marsumlaufbahn verwendet, dienen aber auch einer Absicherung der Kommunikation in einem Notfall.
Außerdem verfügt der MRO über eine Electra-UHF-Kommunikationsanlage, mit deren Hilfe die Sonde mit anderen Marssonden kommunizieren kann, wie mit dem Phoenix-Lander auch 2010 mit dem Mars Science Laboratory. Dadurch können die Daten der Landemissionen durch den MRO zur Erde weitergeleitet werden. Außerdem kann durch die Messung von Signallaufzeiten die genaue Position der Lander auf der Marsoberfläche bestimmt werden.[2]
Antriebssystem
Der MRO verwendet ein Antriebssystem, das katalytisch zersetztes Hydrazin als einzigen Treibstoff verbrennt und daher keinen Oxidator mitführt. Der aus Titan bestehende Tank der Sonde mit einem Volumen von 1.175 Liter kann maximal 1.187 kg Treibstoff aufnehmen, wobei jedoch nur 1.149 kg Treibstoff mitgeführt werden, um die maximale Nutzlast der Trägerrakete nicht zu überschreiten. Diese Treibstoffmenge würde ausreichen, um die Geschwindigkeit der Sonde um 1.551 m/s zu ändern. Über 70 % des Treibstoffs wurden beim Einschwenken in die Marsumlaufbahn verbraucht, da hier die Sonde stark abgebremst werden musste, um von der Anziehungskraft des Mars eingefangen zu werden. Um den Treibstoff unter Druck zu setzen, wird Helium-Gas verwendet, das in einem separaten, unter Hochdruck stehenden Tank gelagert wird.
Das Antriebssystem der Sonde besteht aus 20 Triebwerken, in drei verschiedenen Größen:
- Sechs große MR-107N-Triebwerke, die jeweils 170 N Schub erzeugen (insgesamt 1.020 N). Diese Triebwerke werden für das erste Kurskorrekturmanöver sowie für den Einschuss in die Marsumlaufbahn verwendet.
- Sechs mittelgroße MR-106E-Triebwerke, die jeweils 22 N Schub erzeugen. Diese Triebwerke werden zur Korrektur der Flugbahn eingesetzt und um die Sonde beim Einschuss in die Marsumlaufbahn auf dem richtigen Kurs zu halten.
- Acht kleine MR-103D-Triebwerke, die jeweils 0,9 N Schub erzeugen. Sie werden für die Lageregelung des MRO sowohl während der normalen Operationszeit, als auch während des Eintritts in die Marsumlaufbahn und während der Flugbahnkorrekturen eingesetzt.
Außerdem werden zur präzisen Lageregelung vier Drallräder eingesetzt, insbesondere bei hochauflösenden Aufnahmen, wo bereits die kleinste Bewegung eine Unschärfe in dem Bild verursacht. Jedes Rad wird für jeweils eine Bewegungsachse verwendet, das vierte Rad gilt als Reserve, sollte eins der übrigen drei ausfallen. Ein einzelnes Drallrad wiegt 10 kg und kann mit bis zu 6.000 Umdrehungen pro Minute rotieren.
Navigationssystem
Navigationssysteme und Sensoren liefern Informationen zur Position, Kurs und Ausrichtung der Sonde während des Flugs. Diese Daten sind entscheidend, um genaue Manöver auf dem Weg zum Mars ausführen zu können, um die Solarkollektoren auf die Sonne und um die Antenne auf die Erde ausgerichtet zu halten. Außerdem muss die Lage der Sonde sehr genau kontrolliert werden, um unverschwommene hochauflösende Aufnahmen der Marsoberfläche machen zu können. Für diese Zwecke verfügt das Navigationssystem über mehrere Sensoren und Instrumente:
- 16 Sonnensensoren (acht davon sind als Reserve gedacht) sind auf allen Seiten der Sonde angeordnet. Die Sensoren sind sehr einfach aufgebaut und liefern als Antwort nur ob sie die Sonne sehen oder nicht. Aus den Daten einzelner Sensoren errechnet der Computer dann die ungefähre Position der Sonne. Sollte die Sonde die Orientierung verlieren, sind diese Sensoren ausreichend, um die Solarkollektoren auf die Sonne auszurichten und damit die Stromversorgung zu gewährleisten. Allerdings können sie nicht zu einer genauen Ausrichtung der Sonde auf die Erde und auf den Mars genutzt werden.
- Zwei Star Tracker (einer dient als Reserve) der Marke A-STR von Galileo Avionica[3] zur genauen Ausrichtung sowohl auf die Sonne, als auch auf die Erde und den Mars. Ein Star Tracker ist eine kleine Kamera, die Digitalbilder der Sterne aufnimmt. Diese Bilder werden mit den im Bordcomputer gespeicherten Daten tausender von Sternen verglichen. Hat der Star Tracker die Sterne auf dem Bild identifiziert, weiß der Computer sehr genau, wo und in welcher Ausrichtung sich die Sonde befindet. Der Star Tracker nimmt zehn Bilder pro Sekunde auf.
- Zwei Miniature Inertial Measurement Units (MIMU) (eins dient als Reserve) von Honeywell[3], bestehend aus jeweils drei Gyroskopen und drei Beschleunigungsmessern. Dabei wird je ein Gyroskop und ein Beschleunigungsmesser pro Bewegungsachse verwendet. Die Gyroskope werden zur Messung der Drehgeschwindigkeit der Sonde eingesetzt (z. B. bei der Drehung zur Lageregelung) und die Beschleunigungsmesser zur Messung der Beschleunigung (z. B. beim Feuern von Triebwerken). Zudem wird bei dem Experiment Atmospheric Structure Investigation Accelerometers mit Hilfe der Beschleunigungsmesser die Bremswirkung der oberen Atmosphärenschichten während des Aerobrakings gemessen. Dies gibt Aufschluss über die Dichte und Struktur der oberen Atmosphäre.
Außerdem verfügt der MRO mit der Optical Navigation Camera über ein Experiment zur optischen Navigation für einen genaueren Einschuss in die Marsumlaufbahn. Dazu werden die Mars-Monde Phobos und Deimos 30 bis zwei Tage vor der Ankunft der Sonde am Mars fotografiert, um so die genaue Position der Sonde festzustellen. Die Optical Navigation Camera ist zum sicheren Eintreten des MRO in die Umlaufbahn nicht notwendig. Sollte dieses Experiment jedoch positive Ergebnisse liefern, wird diese Art von Navigation bei zukünftigen Landemissionen eingesetzt, die mit einer sehr hohen Präzision am Mars ankommen müssen, um die sehr genau festgelegten Landestellen nicht zu verpassen.[4]
Instrumente
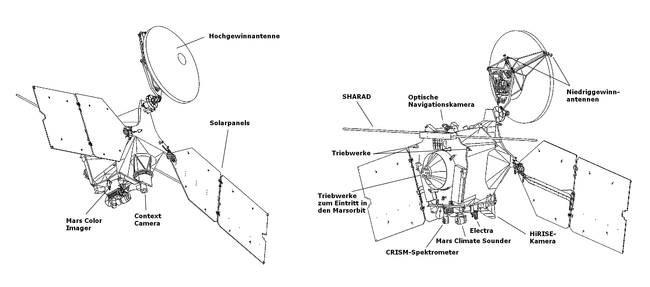
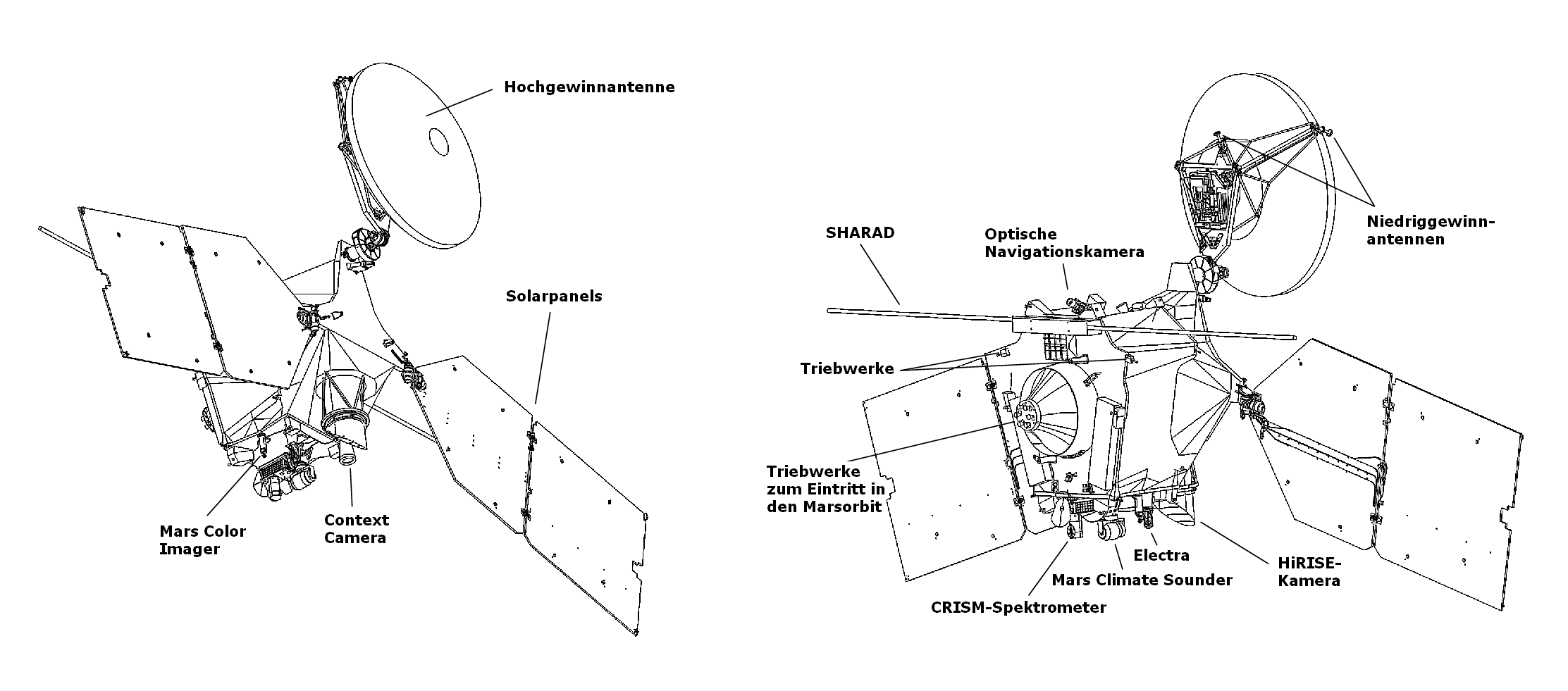
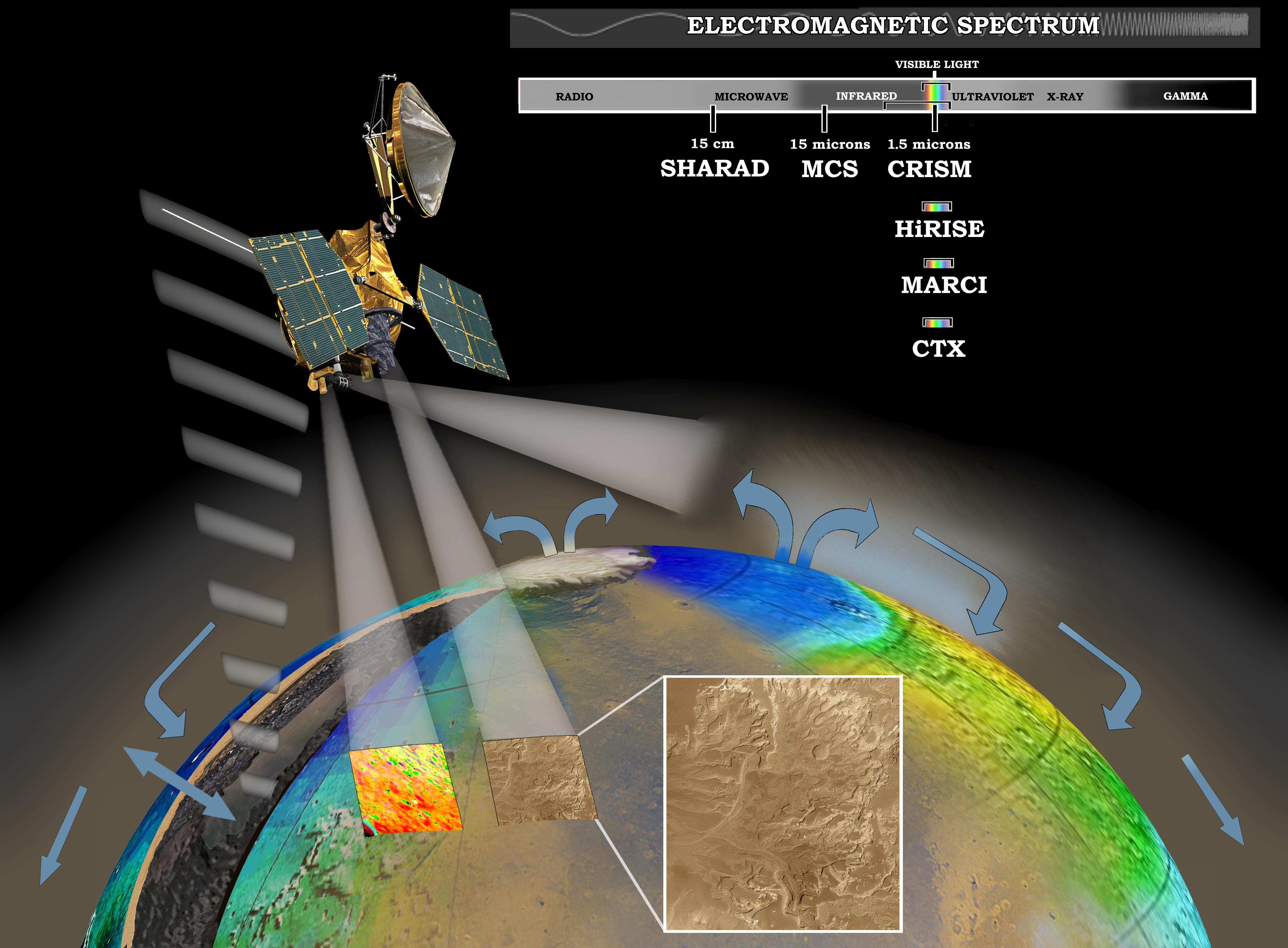
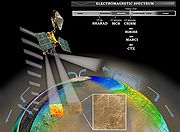 Instrumente des MRO und deren Anwendungsgebiete
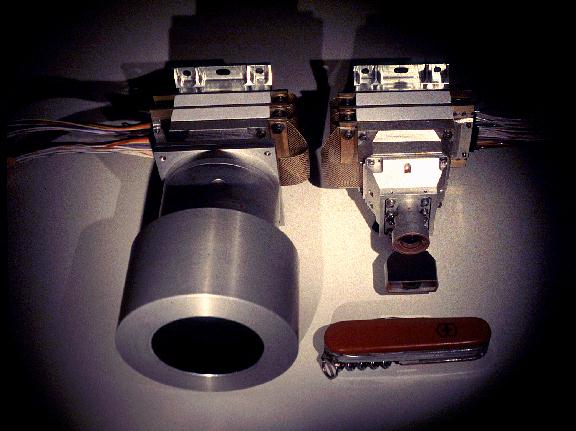
Instrumente des MRO und deren Anwendungsgebiete HiRISE-Kamera bei den Startvorbereitungen
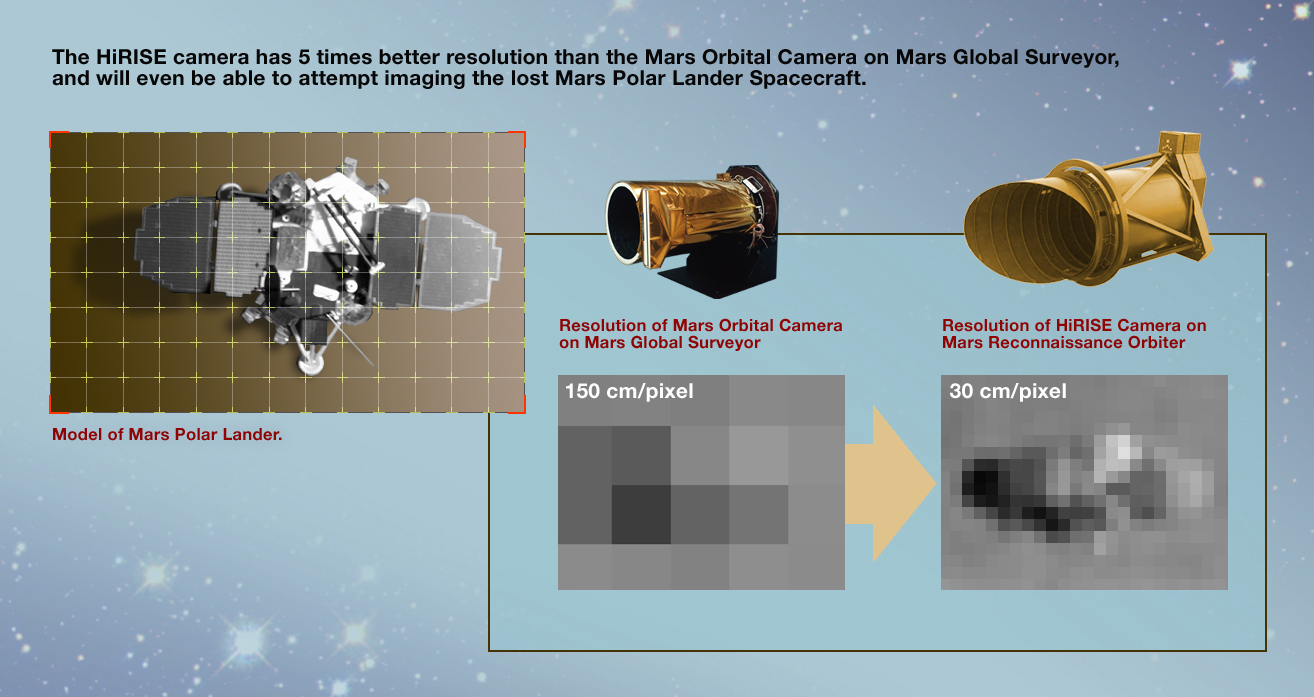
HiRISE-Kamera bei den Startvorbereitungen Vergleich der HiRISE-Kamera mit der MOC-Kamera des Mars Global Surveyors
Vergleich der HiRISE-Kamera mit der MOC-Kamera des Mars Global SurveyorsAn Bord des MRO befinden sich sowohl sechs wissenschaftliche Instrumente als auch einige technische Experimente, wie die Ka-Band-Kommunikation, die Electra-Kommunikationsanlage und die optische Navigationskamera. Die technischen Experimente wurden in dem Abschnitt Technik beschrieben, hier werden die wissenschaftlichen Instrumente vorgestellt.
- High Resolution Imaging Science Experiment (HiRISE)
- Das größte und wichtigste Instrument an Bord von Mars Reconnaissance Orbiter ist das HiRISE, das aus einer hochauflösenden Fotokamera mit einem Cassegrain-Teleskop von 1,40 m Länge und einem Durchmesser von 50 cm besteht. HiRISE ist nach HRSC von Mars Express die zweite hochauflösende Stereokamera einer Mars-Sonde. Das Teleskop enthält drei Spiegel und verfügt über ein Sichtfeld von 1,14° × 0,18°. Die Kamera wiegt etwa 65 kg und vermag aus 300 km Höhe Aufnahmen mit einer maximalen vertikalen Auflösung von 20-30 cm pro Pixel zu erzeugen. Für die Aufnahmen stehen drei Spektralbänder zur Verfügung: Blau-Grün BG (400-600 nm), Rot (550-850 nm) und Nah-Infrarot NIR (800-1.000 nm). Im BG-Band wird ein 6 km breiter Streifen erfasst, in Rot und NIR jeweils 1,2 km breit. Die Länge des erfassten Bildes beträgt dabei etwa das Doppelte seiner Breite. Zur Erfassung des einfallenden Lichtes enthält HiRISE insgesamt 14 detector-chip-assemblies (DCA), die jeweils ein CCD-Modul mit der dazugehörenden Steuerelektronik beherbergen. Jedes CCD-Modul besteht dabei aus jeweils 2.048 12 × 12 µm großen Pixeln quer zur Flugrichtung sowie 128 TDI-Elementen entlang der Flugrichtung. Die TDI-Elemente (Time Delay and Integration) werden zur Verbesserung des Signal-Stör-Verhältnisses verwendet. Für das BG und NIR Band stehen jeweils zwei DCAs mit insgesamt 4.048 Pixel für jedes Band zur Verfügung. Für das Rot-Band sind es zehn DCAs mit insgesamt 20.264 Pixeln. Zur Echtzeitdatenkompression kann eine Lookup-Tabelle verwendet werden, die mit der Kamera aufgenommene 14-Bit Signale in 8-Bit Signale transformiert. Zusätzlich steht eine verlustfreie 2:1-Kompressionsmethode zur Verfügung. Ein typisches hochauflösendes Bild der HiRISE-Kamera ist 20.000 × 40.000 Pixel groß (d. h. ca. 800 Megapixel), zur Übertragung zur Erde werden in Abhängigkeit von der Erde-Mars-Entfernung und des Kompressionsfaktors 4 bis 48 Stunden benötigt. Die Kamera verfügt über einen internen 28 GBit Speicher, um die Aufnahmen zwischenzuspeichern, bevor sie an den Bordcomputer weitergegeben werden. Die Entwicklungskosten für HiRISE lagen bei etwa 35 Millionen Dollar. Das Instrument wurde von Ball Aerospace im Auftrag der University of Arizona gebaut.[5][6]
- Context Imager (CTX)
- CTX ist ebenfalls eine Kamera, die Graustufenbilder im sichtbaren Licht mit einer Wellenlänge von 500 bis 800 nm erzeugt und mit einer geringeren Auflösung von etwa sechs Metern arbeitet. Sie soll dazu dienen, Teile vom Mars zu kartografieren, vor allem aber, die Daten der hochauflösenden HiRISE-Kamera und des CRISM-Spektrometers richtig in den globalen Kontext einfügen zu können. CTX verfügt über ein Maksutov-Teleskop mit 35 cm Brennweite und 6° Sichtfeld, zur Aufnahme dient ein aus 5064 Pixeln bestehendes CCD Zeilenarray. Ein typisches Bild ist etwa 30 km weit. Das Instrument besitzt einen 256 MB großen DRAM-Speicher, was ausreichend ist, um ein 160 km langes Bild intern abzuspeichern, bevor es in den Hauptspeicher der Sonde übertragen wird. Gebaut wurde das Instrument bei Malin Space Science Systems.[7][8]
 Mars Color Imager
Mars Color Imager- Mars Color Imager (MARCI)
- MARCI besteht aus einer Weitwinkelkamera und einer Telekamera, die überwiegend zur Untersuchung der Mars-Atmosphäre eingesetzt werden. MARCI ist eine Kopie der mit dem Mars Climate Orbiter 1999 verloren gegangenen Kamera, lediglich das Objektiv der Kamera wurde durch ein größeres Fischaugenobjektiv mit 180° Blickwinkel ersetzt, um Rollbewegungen der Raumsonde zu kompensieren, die zum Betrieb anderer Instrumente nötig sind. Die Kameras sind an gemeinsame Elektronik angeschlossen und verfügen über sieben Spektralkanäle, davon fünf im sichtbaren Licht bei Wellenlängen von 425, 550, 600, 650 und 725 Nanometern und zwei im UV-Licht bei 250 und 320 Nanometern. Mit dem Instrument sollen Oberflächenänderungen wie Sandbewegungen oder die sich ändernde Ausmaße der Polkappen registriert werden, zudem soll die Atmosphäre nach verschiedenen Elementen, so z.B. nach Ozon, durchsucht werden. Außerdem wird MARCI eingesetzt, um tägliche Wetterberichte vom gesamten Planeten zu liefern. Gebaut wurde das Instrument bei Malin Space Science Systems.[9]
 CRISM Experiment (NASA)
CRISM Experiment (NASA)- Compact Reconnaissance Imaging Spectrometer for Mars (CRISM)
- CRISM ist ein Spektrometer, mit dem die komplette Mars-Oberfläche nach Vorkommen von unterschiedlichen Mineralien gescannt wird. Dafür verfügt CRISM über 544 verschiedene Spektralkanäle, womit gezielt nach bestimmten Mineralien gesucht werden kann. Dabei geht es vor allem um die Mineralien, die bei einem Kontakt mit Wasser entstehen können, wie z. B. Hämatit. CRISM soll zunächst die gesamte Mars-Oberfläche mit einer Auflösung von 100-200 m und in etwa 70 Spektralkanälen scannen, um dann Gebiete auswählen zu können, die mit einer höheren Auflösung erfasst werden (maximal bis 18 m). Der Spektrometer verfügt über einen Teleskop mit einer 10-cm-Apertur und 2° Sichtfeld, mit dem Bilder der Marsoberfläche mit einer Breite von etwa 10 km aufgenommen werden. Das Instrument zeichnet die Lichtintensitäten im Spektralband bei Wellenlängen von 370 bis 3.940 nm auf, wobei dieses Band in 6,55 nm breite Streifen aufgeteilt wird. Die Entwicklungskosten für dieses Instrument betrugen 17,6 Millionen Dollar. Das Instrument wurde vom Applied Physics Laboratory (APL) der Johns Hopkins University entwickelt.[10]
- Mars Climate Sounder (MCS)
- MCS ist ein Experiment zur Untersuchung der Mars-Atmosphäre und dient als Ersatz für bei den Missionen Mars Observer und Mars Climate Orbiter verlorengegangene Instrumente mit ähnlicher Zielsetzung. MCS verfügt über zwei Teleskope mit Aperturen von 4 cm. Im Gegensatz zu anderen Instrumenten, die alle senkrecht nach unten schauen, sind die Teleskope des MCS im Normalbetrieb auf den Horizont ausgerichtet, können jedoch auch in andere Richtungen gedreht werden. MCS verfügt über neun Spektralkanäle und soll die Verteilung von Staub und Wasserdampf in der Atmosphäre studieren. Außerdem wird die Veränderung der Lufttemperatur und des Luftdrucks erfasst. Einer der neun Kanäle umfasst die Frequenzen des sichtbaren und des nah-infraroten Lichts bei einer Wellenlänge von 300 bis 3.000 nm. Die übrigen acht Kanäle befinden sich im thermischen infraroten Bereich des elektromagnetischen Spektrums bei Wellenlängen von 12 bis 50 µm. Aus den Daten des MCS soll eine dreidimensionale Karte der Mars-Atmosphäre mit Staub, Wasserdampf, Druck und Temperaturverteilungen bis in 80-100 km Höhe entstehen. Das Instrument wurde vom Jet Propulsion Laboratory entwickelt.[11]
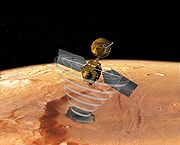 Künstlerische Darstellung der SHARAD-Arbeitsweise
Künstlerische Darstellung der SHARAD-Arbeitsweise- Shallow Radar (SHARAD)
- Das SHARAD-Experiment soll mit Hilfe eines Bodenradars nach unter der Marsoberfläche auftretenden Wasser- und/oder Eisvorkommen suchen. SHARAD ist der Nachfolger des auf der 2003 gestarteten europäischen Mars-Express-Raumsonde eingesetzten MARSIS-Experimentes. Da es jedoch mit Frequenzen von 15-25 MHz in einem etwas anderen Frequenzbereich arbeitet, können sich die Ergebnisse beider Geräte gegenseitig ergänzen. SHARAD kann von 100 Metern bis zu einem Kilometer tief in die Marskruste eindringen, hat eine horizontale Auflösung von 0,3-1 km entlang der Flugrichtung und 3-7 km quer zu der Flugrichtung sowie eine vertikale Auflösung von 7 m. Das bedeutet, dass das Objekt mindestens diese Dimensionen haben muss, um beobachtbar zu sein. Mit SHARAD sollen sich Wasservorkommen unter der Marsoberfläche bis in 100 m Tiefe finden lassen. Das Instrument wurde von Alenia Spazio im Auftrag der Italienischen Raumfahrtagentur (ASI) entwickelt.[12][13]
Ablauf der Mission
 Start des Mars Reconnaissance Orbiters
Start des Mars Reconnaissance OrbitersDie ersten Vorschläge einen mit einer leistungsfähigen Kamera ausgestatteten Orbiter 2003 zum Mars zu schicken tauchten bei der NASA im Jahr 1999 auf. Die Raumsonde mit der vorläufigen Bezeichnung Mars Surveyor Orbiter sollte sowohl die vom verlorengegangenen Mars Climate Orbiter erwarteten wissenschaftlichen Daten gewinnen als auch zusätzlich nach Spuren von Wasser auf dem Mars suchen. Die Sonde sollte etwa die Größe des 1996 gestarteten Mars Global Surveyors erreichen und hätte somit relativ günstig hergestellt und gestartet werden können [14]. Für das gleiche Startfenster visierte man auch den Start eines größeren Marsrovers. Im Juli 2000 entschied die NASA schließlich dem Rover-Projekt Vorzug zu gewähren und den Rover 2003 zum Mars zu schicken [15] (später wurde die Doppelmission der beiden Rover Spirit und Opportunity daraus). Der Start des Orbiters wurde daraufhin um zwei Jahre auf 2005 verschoben und seine Mission erweitert: es sollte nun ein größerer und entsprechend teurer Orbiter, bestückt mit leistungsfähigen Instrumenten, entwickelt werden. Im Herbst 2000 startete das neue Projekt unter der Bezeichnung Mars Reconnaissance Orbiter [16]. In Oktober 2001 erhielt Lockheed Martin den Auftrag der NASA zum Bau der Sonde [17].
Start
Der Mars Reconnaissance Orbiter sollte am 10. August 2005 mit einer Atlas-V(401)-Rakete von Cape Canaveral aus gestartet werden. Aufgrund technischer Probleme mit der Trägerrakete wurde der Start zunächst auf den 11. August verschoben. Auch dieser Starttermin konnte aufgrund von Problemen mit der Centaur-Oberstufe nicht gehalten werden. Der Start erfolgte dann beim dritten Versuch am 12. August um 11:43 Uhr UTC. Die Raumsonde wurde 57 Minuten und 54 Sekunden nach dem Start von der Centaur-Oberstufe abgetrennt, drei Minuten später konnte über eine japanische Antenne im Uchinoura Space Center der Kontakt zu der Sonde hergestellt werden. 14 Minuten nach dem Abtrennen wurde das Ausfahren der großen Solarkollektoren erfolgreich beendet.[18]
Flugphase
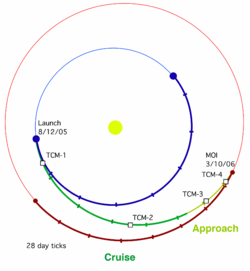 Erde-Mars-Transferbahn der Sonde
Erde-Mars-Transferbahn der SondeNach dem erfolgreichen Start und Aktivierung wurde die Sonde in den „cruise mode“ überführt, in dem sie sich bis ungefähr zwei Monate vor der Ankunft am Mars befand. Diese Phase der Mission beinhaltete tägliche Überwachung der Teilsysteme der Sonde, Bestimmung und Korrektur der Flugbahn sowie Tests und Kalibrierung der Instrumente. Am 15. August wurde das MARCI-Instrument getestet, wofür Aufnahmen der Erde und des Mondes angefertigt wurden. Am 8. September folgten Tests der HiRISE, CTX und Optical Navigation Camera, wofür die Instrumente auf den mittlerweile 10 Millionen Kilometer entfernten Mond zurückblickten. Alle Tests verliefen erfolgreich.
Die etwa 500 Millionen Kilometer lange Reise zum Mars dauerte ungefähr sieben Monate. Um die Raumsonde auf ihrem Weg zu steuern, waren fünf Kurskorrekturmanöver geplant. Das erste 15 Sekunden lange Manöver (TCM-1) erfolgte am 27. August 2005 unter Verwendung aller sechs großen 170 N Triebwerke. Zuvor feuerten sechs kleinere Triebwerke für 30 Sekunden, um den Treibstoff in dem Tank für einen besseren Durchfluss zu positionieren. Bei dem Manöver wurde eine Geschwindigkeitsänderung von 7,8 m/s erzielt. Die restlichen Kurskorrekturen nutzen die kleineren 22 N Triebwerke, wobei das 20 Sekunden lange zweite Kurskorrekturmanöver (TCM-2) am 17. November erfolgte und eine Geschwindigkeitsänderung von 0,75 m/s erzielte. Das dritte Kurskorrekturmanöver (TCM-3) sollte 40 Tage vor der Ankunft stattfinden, wurde jedoch abgesagt, da die Sonde sich bereits auf einem optimalen Kurs befand. Das vierte Kurskorrekturmanöver (TCM-4) war für den 28. Februar geplant, wurde jedoch aus demselben Grund ebenfalls abgesagt. Auch das optionale fünfte Manöver (TCM-5), welches 24 bis sechs Stunden vor dem Eintritt in die Marsumlaufbahn erfolgen sollte, wurde abgesagt.
Ankunft
 Ausschnitt eines der ersten Bilder von MRO
Ausschnitt eines der ersten Bilder von MROUm in die Marsumlaufbahn einzuschwenken (MOI - Mars Orbit Insertion), sollten am 10. März 2006 die großen Triebwerke der Sonde von 21:24 Uhr bis 21:51 Uhr UTC für etwa 26,8 Minuten (1.606 Sekunden) gezündet werden. Aufgrund einer unerwartet geringeren Leistung der Triebwerke musste der Computer des MRO den Brennvorgang jedoch um 35 Sekunden verlängern. Da die Raumsonde sich zum Ende des Bremsmanövers hinter dem Mars befand und daher nicht mit der Erde kommunizieren konnte, gab es erst um 23:16 Uhr ein Signal von der Sonde sowie einige Minuten später die Bestätigung des erfolgreichen Eintritts in die Marsumlaufbahn. Bei dem Bremsmanöver wurde die Geschwindigkeit der Sonde um 1000,48 m/s (circa 18 % der Anfluggeschwindigkeit) – geplant waren 1000,36 m/s – reduziert, so dass sie von der Anziehungskraft des Mars eingefangen wurde und in einen elliptischen 426 × 43.500 Kilometer Orbit[19] eintrat. Die ersten Testbilder der HiRISE-Kamera der Raumsonde wurden am 24. März empfangen. Die Erwartungen wurden absolut erfüllt. Aus einer Distanz von 2.489 km, die weit über der späteren Arbeitsentfernung liegt, wurden Bilder mit einer Auflösung von 2,5 m pro Pixel gewonnen [20]. Nach weiteren Testbildern am 25. März wurde die Kamera bis zum Beginn der wissenschaftlichen Arbeiten im November 2006 abgeschaltet. Zugleich wurden auch der Context Imager und der Mars Color Imager getestet, wobei die gewonnenen Bilder jedoch erst später veröffentlicht wurden [21].
Eintritt in den Zielorbit
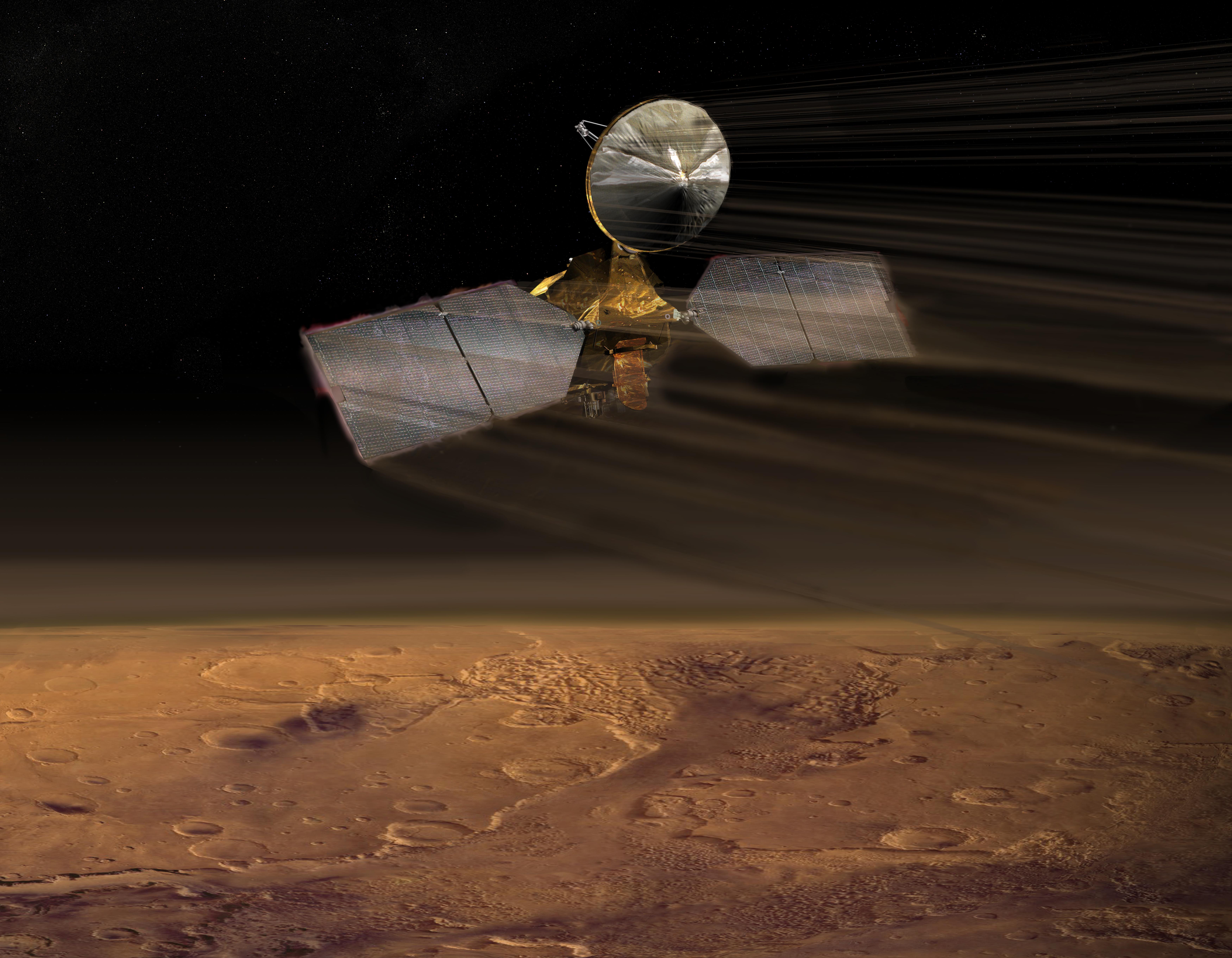
 MRO während des Aerobraking-Manövers (künstlerische Darstellung)
MRO während des Aerobraking-Manövers (künstlerische Darstellung)Am 30. März 2006 wurde mit den Aerobraking-Manövern in der Mars-Atmosphäre begonnen, wobei die Umlaufbahn sukzessiv zu einer etwa 255 × 320 km hohen nahezu polaren sonnensynchronen Bahn mit einer Umlaufszeit von 112 Minuten reduziert werden sollte. Dazu wurden zunächst die MR-106E-Triebwerke der Sonde für 58 Sekunden gezündet, womit der marsnächste Punkt der Umlaufbahn auf 333 km reduziert wurde [19]. Durch weitere Bremsmanöver brachte man den niedrigsten Punkt der Umlaufbahn innerhalb der sehr dünnen oberen Marsatmosphäre, die eine weitere Bremswirkung auf den Orbiter ausübte. Dabei wurden die beiden großen Solarpaneele des MRO in eine Position gebracht, in der sie einen höheren Luftwiderstand erzeugten. Um die Raumsonde durch die aufgrund von Luftreibung entstehende Hitze nicht zu gefährden, durfte jeder einzelne Eintauchvorgang nur eine begrenzte Zeit dauern und somit nur einen Bruchteil der Fluggeschwindigkeit reduzieren. Daher schätzte man am Anfang der Mission die Anzahl der benötigten Eintauchvorgänge auf circa 500. Durch das Aerobraking konnten etwa 600 kg Treibstoff gespart werden, die MRO sonst mitführen müsste, um allein mit Hilfe seiner Triebwerke dieselbe Zielumlaufbahn zu erreichen.
 Aufnahme des Victoria-Kraters mit dem sich in der Nähe befindenden Opportunity-Rover
Aufnahme des Victoria-Kraters mit dem sich in der Nähe befindenden Opportunity-RoverDie Aerobraking-Manöver konnten am 30. August 2006 nach 426[22] Eintauchvorgängen in der Atmosphäre erfolgreich abgeschlossen werden. An diesem Tag feuerte die Raumsonde ihre MR-106E-Triebwerke sechs Minuten lang und brachte damit den marsnächsten Punkt der Umlaufbahn in 210 km Höhe, was deutlich über der Obergrenze der Atmosphäre liegt (während des Aerobrakings lag er im Mittel bei 98 bis 105 km) [23]. Am 11. September folgte ein weiteres – und mit 12,5 min Brennzeit das nach Mars Orbit Insertion längste – Bahnkorrekturmanöver, welches die Bahnhöhe auf 250 × 316 km brachte und den niedrigsten Punkt der Umlaufbahn in die Nähe des Südpols sowie den höchsten in die Nähe des Nordpols platzierte [22].
Am 16. September 2006 wurde die 10 m lange Antenne des SHARAD-Radars entfaltet (eine ähnliche Operation bereitete bei der europäischen Raumsonde Mars Express zahlreiche Probleme) [24]. Am 27. September folgte das Entfernen der Schutzabdeckung und die Kalibrierung des CRISM-Instruments [25].
Am 3. Oktober fertigte HiRISE-Kamera Aufnahmen vom Victoria-Krater, an dessen Rand sich zu dem Zeitpunkt der Opportunity-Rover befand. Die hochauflösenden Aufnahmen lassen deutlich den Rover sowie seine Spuren im Marsboden erkennen, selbst der Schatten des Rover-Kameramastes ist sichtbar.[26]
Vom 7. Oktober bis zum 8. November 2006 befand sich der Planet Mars in einer Sonnenkonjunktion. In diesem Zeitraum war die Sonne direkt zwischen dem Mars und der Erde, so dass nur eine eingeschränkte Kommunikation des Orbiters mit der Erde stattfinden konnte. Nach der Sonnenkonjunktion wurde der Mars Reconnaissance Orbiter weiteren kleineren Funktionstests unterzogen und steht seit November 2006 für wissenschaftliche Arbeiten zur Verfügung.
Primärmission
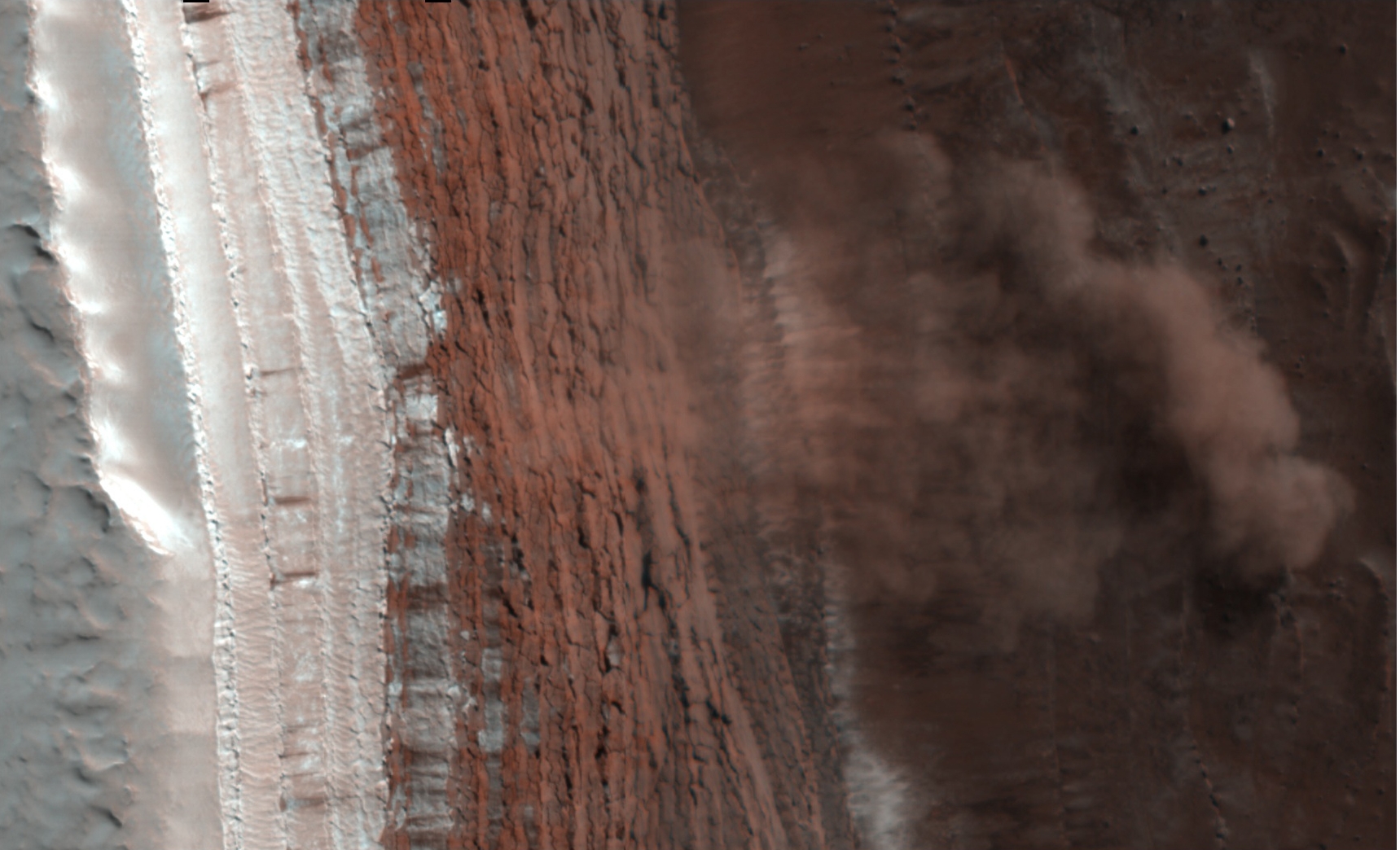
 Lawine auf dem Mars, aufgenommen von der HiRISE-Kamera
Lawine auf dem Mars, aufgenommen von der HiRISE-KameraDie primäre Mission der Sonde am Mars dauert vier Jahre, davon soll zwei Jahre lang vom November 2006 bis Dezember 2008 sowohl der Mars mit der HiRISE-Kamera kartografiert, als auch mit den übrigen Instrumenten untersucht werden. Die nächsten zwei Jahre soll der Orbiter als eine Plattform zur Kommunikation zwischen zukünftigen Landemissionen und der Erde dienen. Die Primärmission endet am 31. Dezember 2010. Sollte die NASA die Sonde nach dem Ende der Primärmission weiter einsetzen wollen, so sollte der bordeigene Treibstoff ausreichen, um MRO mindestens weitere fünf Jahre als Kommunikationsplattform betreiben zu können. Da der eigens für diesen Zweck zu entwickelnde Mars-Kommunikationssatellit Mars Telecommunications Orbiter, der nach seiner geplanten Ankunft am Mars 2010 erheblich mehr Daten als MRO übertragen hätte können, im Juli 2005 aus Budgetgründen gestrichen wurde, erscheint es nun als wahrscheinlich, dass der MRO als Kommunikationsplattform über seine primäre Missionszeit weiter betrieben wird.
Siehe auch
Quellenangaben
- ↑ NASA: ATLAS III CHOSEN TO LAUNCH MARS RECONNAISSANCE ORBITER, 11. Juni 2002
- ↑ NASA: Spacecraft Parts - Electra
- ↑ a b American Astronautical Society: Mars Reconnaissance Orbiter Design Approach for High-Resolution Surface Imaging (PDF), 2003
- ↑ NASA: Spacecraft Parts - Optical Navigation Camera
- ↑ HiRISE Homepage
- ↑ Sixth International Conference on Mars (2003): HiRISE: Instrument Development (PDF)
- ↑ Malin Space Science Systems: Context Imager (CTX)
- ↑ NASA: Spacecraft Parts - Context Imager (CTX)
- ↑ Malin Space Science Systems: Mars Color Imager (MARCI)
- ↑ APL: Compact Reconnaissance Imaging Spectrometer for Mars (CRISM)
- ↑ NASA: Spacecraft Parts - Mars Climate Sounder (MCS)
- ↑ SHARAD Homepage
- ↑ Planetary and Space Science: SHARAD: The MRO 2005 shallow radar (PDF)
- ↑ NASA: NASA IDENTIFIES TWO OPTIONS FOR 2003 MARS MISSIONS; DECISION IN JULY, 20. Mai 2000
- ↑ NASA: NASA GOES BACK TO THE FUTURE WITH PLANS FOR A MARS ROVER IN 2003, 27. Juli 2000
- ↑ Space.com: NASA Unveils Plans for 21st Century Mars Campaign, 26. Oktober 2000
- ↑ Space.com: NASA Picks Lockheed Martin to Build 2005 Mars Craft, 3. Oktober 2001
- ↑ NASA: NASA's Multipurpose Mars Mission Successfully Launched, 12. August 2005
- ↑ a b NASA: NASA's Mars Reconnaissance Craft Begins Adjusting Orbit, 31. März 2006
- ↑ NASA: NASA's New Mars Orbiter Returns Test Images, 24. März 2006
- ↑ NASA: Mars Cameras Debut as NASA Craft Adjusts Orbit, 13. April 2006
- ↑ a b NASA: NASA Mars Reconnaissance Orbiter Reaches Planned Flight Path, 12. September 2006
- ↑ NASA: Mars Reconnaissance Orbiter Successfully Concludes Aerobraking, 30. August 2006
- ↑ JPL/NASA: Ground-Piercing Radar on NASA Mars Orbiter Ready for Work, 19. September 2006
- ↑ APL: APL-Built Mineral-Mapping Imager Begins Mission at Mars, 27. September 2006
- ↑ NASA: NASA's Mars Rover and Orbiter Team Examines Victoria Crater, 6. Oktober 2006
Weblinks
- NASA's Mars Reconnaissance Orbiter Website (englisch)
- MRO launch press kit (PDF, englisch)
- Website der HiRISE-Kamera (englisch)
- Mars Reconnaissance Orbiter von Bernd Leitenberger
- extrasolar-planets.com – Mars Reconnaissance Orbiter
- Spiegel-ONLINE: Mars-Matsch entzückt Forscher
 Marssonden
Marssonden„Mars“-Raumsonden (1960–1973) · Mariner 3,4,6–9 (1964–1971) · Zond 2 (1964) · Viking (1975) · Fobos (1988) · Mars Observer (1993) · Mars Global Surveyor (1996) · Mars 96 (1996) · Mars Pathfinder (1996) · Nozomi (1998) · Mars Climate Orbiter (1998) · Mars Polar Lander mit Deep Space 2 (1999) · 2001 Mars Odyssey (2001) · Mars Express mit Beagle 2 (2003) · Spirit (2003) · Opportunity (2003) · Mars Reconnaissance Orbiter (2005) · Phoenix (2007) · Fobos-Grunt (2009) · Mars Science Laboratory (2011) · Mars Science and Telecommunications Orbiter (2011 oder 2013) · ExoMars (2013) · MAVEN (2013) · Mars Sample Return (nicht vor 2016)
Gestrichene Missionen: Mars Surveyor 2001 · Mars Telecommunications Orbiter
(Siehe auch: Mars · Chronologie der Mars-Missionen · Bemannter Marsflug · Aurora-Programm)







Wikimedia Foundation.