- Koordinatennetz
-
 Zweidimensionale, kartesische Koordinaten zur Lokalisierung von Hydranten und Wasserabsperrhähnen.
Zweidimensionale, kartesische Koordinaten zur Lokalisierung von Hydranten und Wasserabsperrhähnen.Ein Koordinatensystem (mathematisches Kürzel: KOS) dient der Positionsangabe von Punkten im Raum. Der Fachbegriff der Koordinate, in der Bedeutung „Lageangabe“, wurde im 18. Jahrhundert aus dem Wort Ordinate gebildet.[1]
Verwendung
 Mannheimer Straßenschild
Mannheimer StraßenschildKoordinatensysteme sind Hilfsmittel der Mathematik, die in vielen Wissenschaften und der Technik verwendet werden. Daneben finden sich Koordinatensysteme jedoch auch im Alltag:
- Die Längen- und Breitengrade bilden ein geographisches Koordinatensystem der Erde.
- In vielen Spielen wie Schiffe versenken oder beim Schachbrett werden Felder mit Koordinaten wie B3 bezeichnet.
- Ebenso sind Wanderkarten und Stadtpläne meist in derart bezeichnete Quadrate eingeteilt. In der Quadratestadt Mannheim bilden die Innenstadtstraßen das Koordinatensystem.
- Die Lage von Hydranten werden durch ein vom Hinweisschild ausgehendes Koordinatensystem beschrieben.
Mathematische Grundlagen
Die Position eines Punktes im Raum wird im gewählten Koordinatensystem durch die Angabe von Zahlenwerten, die Koordinate, eindeutig bestimmt. Entsprechend lässt sich die Position eines durch mehrere Punkte bestimmten Objekts (Linie, Kurve, Fläche, Körper) über deren Koordinaten angeben.
Die Anzahl der zur Beschreibung notwendigen Zahlenwerte ist die Dimension des Raumes (oft als n abgekürzt). Man fasst die Koordinaten eines n-dimensionalen Raumes dann auch als n-Tupel von reellen Zahlen (allgemeiner: von Elementen des zugrundeliegenden Körpers) auf.
Das am häufigsten verwendete Koordinatensystem ist – dies gilt besonders für die Schulmathematik – das Kartesische Koordinatensystem, sowie Polarkoordinatensysteme.
Koordinatenursprung, Pol
Der Koordinatenursprung (mathematisches Kürzel KOU) bezeichnet den Punkt in einem Koordinatensystem oder einer Karte, an dem alle Koordinaten den Wert Null annehmen. Er wird deshalb häufig auch allgemein Nullpunkt genannt, bei Polarkoordinaten Pol.
Durch den Ursprung verlaufen die Koordinatenachsen, sofern das Koordinatensystem solche hat.
Unterschiedliche Koordinatensysteme
Die Positionen desselben Punktes im Raum können in verschiedenen Koordinatensystemen dargestellt werden. In den unterschiedlichen Darstellungen wird diese durch unterschiedliche Koordinaten repräsentiert. Bei Systemen, die eine Symmetrie aufweisen kann man durch Darstellung in einem geeigneten Koordinatensystem erreichen, dass einzelne Koordinaten konstant bleiben. Zum Beispiel genügt zur Festlegung einer Position auf der Erdoberfläche, wenn es auf die Höhe über Normalnull (genauer: Ortsabhängigkeit des Erdradius) nicht ankommt, die Angabe von lediglich zwei Koordinaten (wie Längengrad und Breitengrad), die dritte Koordinate ist durch den Erdradius festgelegt. Während sich in solchen Fällen die Verwendung sphärischer Polarkoordinaten (Kugelkoordinaten) anbietet, erfolgt die Beschreibung von Punkten auf einer Ebene im Raum hingegen einfacher in kartesischen Koordinaten: zwei Koordinaten sind variabel, die dritte ist (ohne Beschränkung der Allgemeinheit) durch den konstanten Abstand der Ebene vom Koordinatenursprung festgelegt.
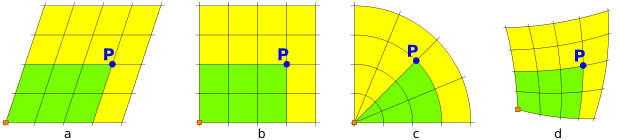 Arten von Koordinatensystemen, jeweils mit dem Punkt P(3;2). a) geradlinige b) geradlinige orthogonale c) krummlinige orthogonale d) krummlinige
Arten von Koordinatensystemen, jeweils mit dem Punkt P(3;2). a) geradlinige b) geradlinige orthogonale c) krummlinige orthogonale d) krummlinigeIm Allgemeinen unterscheidet man zwischen geradlinigen (affinen) und krummlinigen Koordinatensystemen. Wenn außerdem Koordinatenlinien in jedem Punkt senkrecht aufeinander stehen, nennt man solche Koordinatensysteme orthogonal.
- Beispiele
- geradlinige Koordinatensysteme:
- geradlinige orthogonale Koordinatensysteme:
- krummlinige Koordinatensysteme
- krummlinige orthogonale Koordinatensysteme:
Transformationen zwischen Koordinatensystemen
Die Transformation zwischen unterschiedlichen Koordinatensystemen erfolgt durch Koordinatentransformation. Die unterschiedlichen Zahlenwerte der n-Tupel beschreiben dieselbe Position im Raum. Beim Übergang von geradlinigen (affinen) Koordinaten zu krummlinigen Koordinaten ist zur Berechnung von Größen wie Volumen die Funktionaldeterminante (Jacobi-Determinante) anzuwenden.
Spezielle Koordinatensysteme
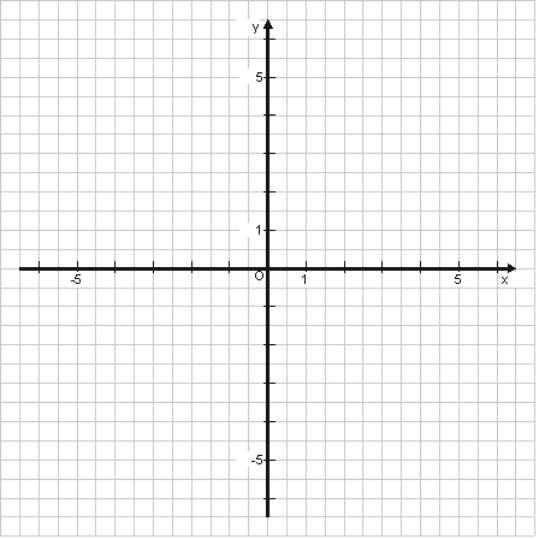
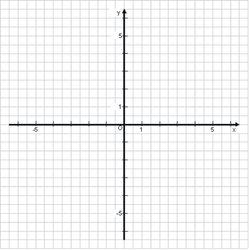 Kartesisches Koordinatensystem im zweidimensionalen Raum
Kartesisches Koordinatensystem im zweidimensionalen RaumDer uns umgebende und in Mathematik und Physik benutzte Raum ist der dreidimensionale euklidische Raum. Wenn für diesen Raum das Newtonsche Trägheitsgesetz der klassischen Physik gilt, spricht man von einem Inertialsystem.
Oft kann eine Raumdimension vernachlässigt werden, so dass nur ein zweidimensionaler Raum zu betrachten ist. Unter Einbeziehung der Zeit entsteht der vierdimensionale Minkowskiraum der Relativitätstheorie.
Diese Räume lassen sich durch kartesische Koordinaten beschreiben, das sind affine (geradlinige) Koordinaten, die entlang senkrecht aufeinander stehender Achsen gemessen werden.
Bei der Beschreibung in Polarkoordinaten werden der Abstand von einem festgelegten Koordinatenursprung und Winkel zu gegebenen Achsen als Koordinaten verwendet. Auch hier stehen die Koordinatenachsen senkrecht aufeinander, aber sie sind krummlinig.
Andere Koordinatensysteme werden in Bezug auf geometrische Objekte (Zylinder, Kegelschnitt) definiert: Zylinderkoordinaten, Hyperbolische Koordinaten.
Einige nur in Fachgebieten (z. B. Geodäsie, Kartographie, Geographie, Fernerkundung, Astronomie) gebräuchliche Koordinatensysteme sind:
- Geographisches Koordinatensystem
- Soldner-Koordinatensystem
- Gauß-Krüger-Koordinatensystem
- UTM-Koordinatensystem
- Astronomische Koordinatensysteme wie das ekliptikale oder galaktische
- Baryzentrische Koordinaten
- Trilineare Koordinaten
- Bewegte Koordinatensysteme
- Rotierende Koordinatensysteme
- Fahrzeugkoordinatensystem
Mathematische Betrachtungen
In einem (endlichdimensionalen) Vektorraum ist durch eine Basis automatisch ein Koordinatensystem gegeben. Die Koeffizienten der Basisvektoren lassen sich als Koordinaten verstehen. Einer Transformation zwischen zwei Basissystemen entspricht eine Transformation zwischen den entsprechenden Koordinatensystemen.
Wenn eine Transformation von einer Basis zu einer anderen eine lineare Abbildung ist, die etwa durch eine Matrix dargestellt werden kann, sind auch die entsprechenden Transformationen der Koordinatensysteme linear.
Rechts- und linkshändige Koordinatensysteme
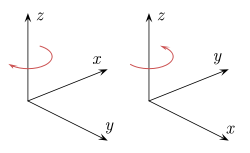 links- und rechtshändiges (rechts) dreidimensionales Koordinatensystem
links- und rechtshändiges (rechts) dreidimensionales KoordinatensystemEin Koordinatensystem wird nicht nur durch die Norm, also die Länge "1", die Grad- oder Krummlinigkeit der Hauptachsen, also der Koordinatenachsen und die Winkel zwischen den Koordinatenachsen unterschieden, sondern auch durch die Orientierung und den Drehsinn des Koordinatensystems. Beide Eigenschaften beschreiben gemeinsam den Zusammenhang der Koordinatenachsen bei rotatorischer Transformation einer Achse in eine andere.
Man unterscheidet zwischen rechts- und linkshändigen Koordinatensystemen (in 3 Dimensionen), wobei standardmäßig rechtshändige Koordinatensysteme den positiven Drehsinn bezeichnen. Zur Überprüfung der Händigkeit nimmt man die rechte Hand mit abgespreiztem Daumen, Zeigefinger und Mittelfinger. Der Daumen zeigt in die positive x-Richtung und der Zeigefinger in die positive y-Richtung. Zeigt die positive z-Achse in die gleiche Richtung wie der Mittelfinger, so handelt es sich um ein rechtshändiges System, andernfalls um ein linkshändiges. Man nennt dieses allgemein gültige Modell die Drei-Finger-Regel.
Einzelnachweise und Fußnoten
- ↑ Etymologie nach Kluge Etymologisches Wörterbuch der deutschen Sprache, 24. Auflage, 2002
Weblinks
- Einfache und verständliche Erklärung (hpts. durch Abbildungen)
- Mathematisch exakte Definitionen (mit Formeln)




Wikimedia Foundation.