- Moving Targets Indication
-
MTI ist ein aus dem englischen Sprachgebrauch kommender und inzwischen weltweit verankerter Begriff aus dem Bereich Radar-Zielerfassung. „Moving Target Indicator“ bezeichnet eine Baugruppe zur „Festzeichenunterdrückung“ in Radar-Geräten. Da in dieser Baugruppe kohärente Signale verarbeitet werden, wird sie auch Kohärent-Kanal genannt
Sich langsam bewegende oder unbewegliche Objekte, meist die Landschaft bzw. Steine, Felsen, werden bei diesem MTI-Verfahren von der Darstellung auf dem „PPI-scope“, also dem Radar-Sichtschirm, ausgeblendet bzw. „unterdrückt“, es verbleiben nur sich relativ zum Radar bewegende Objekte in der Darstellung. Dies filtert Störungen, wie Landfahrzeuge, Eisenbahnen, andere metallisch reflektierende Objekte, auf Wunsch aus und erlaubt z. B. die Darstellung nur noch von Objekten, die schneller als eine vor-einstellbare Relativgeschwindigkeit zum Beobachterradar sind.
Es werden meist Dopplerfrequenzverfahren angewendet. Es gibt zwei Möglichkeiten, mit Hilfe der Dopplerfrequenz ein bewegtes Objekt von einem unbewegten zu unterscheiden:
- direktes Messen der Dopplerfrequenz (schnelle Fourieranalyse)
- indirektes Messen der Dopplerfrequenz durch Messung und Vergleich der Phasenlage.
Inhaltsverzeichnis
Dopplerfrequenz beim Radar
 Dopplerverschiebung bei einem Radargerät
Dopplerverschiebung bei einem RadargerätDer Doppler-Effekt tritt auch bei einem bewegten und durch ein Radargerät beobachteten Objekt (dem „Ziel“) auf. Die Frequenzverschiebung der Sendefrequenz durch den Doppler-Effekt ist ein Maß für dessen Radialgeschwindigkeit. Jedoch tritt bei einem Radargerät der Doppler-Effekt zweimal auf. Einmal auf dem Weg von der Radarantenne zum bewegten Objekt. Wenn ein Radarwarnempfänger im Flugzeug dieses Signal empfangen würde, dann wäre hier die Sendefrequenz plus einer Dopplerfrequenz messbar, weil das Flugzeug sich beispielsweise auf das Radargerät zubewegt. Das Signal mit dieser Frequenz wird nun an der Flugzeugoberfläche reflektiert. Diese reflektierte Energie (Sendefrequenz plus die Dopplerfrequenz des Hinweges) erfährt auf dem Rückweg ein zweites Mal eine Doppler-Verschiebung. Am Radarempfänger kommt also die doppelte Dopplerfrequenz an.
Als Ansatz zur Herleitung der Formel kann die Phasenverschiebung des hochfrequenten Signals als das Verhältnis der Wellenlänge des Radarsenders zu dem zurückgelegten Weg (2·r) der elektromagnetischen Welle genommen werden.
Puls-Pair-Processing
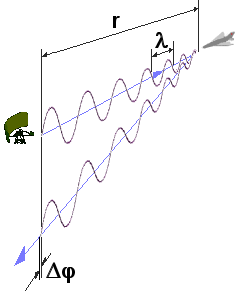
 Zur Erkennung eines bewegten Zieles muss sich die Phasenlage des Echosignals ständig ändern.
Zur Erkennung eines bewegten Zieles muss sich die Phasenlage des Echosignals ständig ändern.Wenn sich das Flugzeug auf das Radargerät zubewegt, dann hat sich auch von Sendeimpuls zu Sendeimpuls die Weglänge r geändert. Deshalb wird bei einem mit einer Radialgeschwindigkeit bewegten Ziel jedes Echosignal mit einer anderen Phasenlage empfangen.
Die Baugruppe Moving Target Indicator muss jetzt diese Phasenänderung erkennen können. Hierbei werden zwei bis drei Impulsperioden miteinander verglichen und Phasenunterschiede des Echosignals ausgewertet. Das Verfahren wird auch „puls-pair-processing“ (auf deutsch: Zwischenperiodenkompensation) genannt. Bleibt die Phasenlage des Echosignals von Impulsperiode zu Impulsperiode konstant, handelt es sich um ein Festziel. Ist die Phasenlage veränderlich, dann ist es ein bewegtes Objekt.
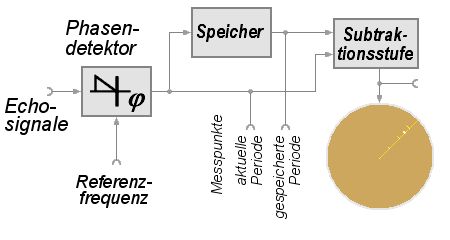 Praktisch muss eine komplette Impulsperiode, also eine Auslenkung auf dem Sichtgerät, in einer geeigneten Baugruppe gespeichert werden, um sie mit der folgenden Impulsperiode zu vergleichen. Der Vergleich besteht bei zwei Impulsperioden aus einer einfachen Subtraktion und Verstärkung der Differenz. Zielzeichen, die keine Phasenverschiebung aufweisen, werden somit ausgelöscht. Zielzeichen, die sich bewegen, haben eine Phasenverschiebung und somit eine Amplitudendifferenz am Ausgang des Phasendetektors und werden auf dem Sichtgerät dargestellt.[1]
Praktisch muss eine komplette Impulsperiode, also eine Auslenkung auf dem Sichtgerät, in einer geeigneten Baugruppe gespeichert werden, um sie mit der folgenden Impulsperiode zu vergleichen. Der Vergleich besteht bei zwei Impulsperioden aus einer einfachen Subtraktion und Verstärkung der Differenz. Zielzeichen, die keine Phasenverschiebung aufweisen, werden somit ausgelöscht. Zielzeichen, die sich bewegen, haben eine Phasenverschiebung und somit eine Amplitudendifferenz am Ausgang des Phasendetektors und werden auf dem Sichtgerät dargestellt.[1]In der Geschichte der Radargeräte wurde anfangs der Speicher als analoge Potenzialspeicherröhre ausgeführt, die eine gesamte Periode spiralförmig auf eine Cäsiumschicht geschrieben hat. Später wurden kleine Kondensatoren als Speicher verwendet: die Entfernung hier schon in kleinen digitalen Schritten (Rangecells) und die Amplitude noch analog als Kondensatorladung (Beispiel: PRW-13). Mit der Verwendung digitaler Speicher aus der Datenverarbeitung wurde diese Baugruppe völlig digital aufgebaut. Heute ist die gesamte Baugruppe oft nur noch ein Softwaremodul im Radar Data Processor, das aber im Programmablauf genau so arbeiten muss, wie ihr Hardwarevorgänger: speichern einer kompletten Impulsperiode und Vergleich der Amplituden mit der aktuellen Impulsperiode.
Doppler-Filter
Eine Trennung der Echosignale von Clutter und von Zielen nach Frequenzen ist in analogen Systemen schwierig, da die auftretenden Dopplerfrequenzen im Verhältnis zur Sendefrequenz sehr klein sind. Erst in digitalen Signalverarbeitungssystemem können die auftretenden Dopplerfrequenzen getrennt und erkannt werden. Hier sind sowohl Tiefpass-Schaltungen („Zero-Dopplerfilter“ und „Clutter-Dopplerfilter“) als auch Filter mit vorgegebenen Frequenzen („Doppler-Filter“) nutzbar, die im Radarsystem eine bestimmte Radialgeschwindigkeit repräsentieren.
Die „Doppler-Filter“ werden für zum Beispiel acht verschiedene Dopplerfrequenzen zu einem Block parallel geschaltet und geben ein Ausgangssignal, wenn eine Dopplerfrequenz erkannt wird, die in das Filterschema passt. Auf diese Weise können auch besondere Ziele wie Hubschrauber[2] in der Standschwebe erkannt werden, die ein Gemisch aus verschiedenen Dopplerfrequenzen zurückstrahlen.
Nachteile des Verfahrens
- Das Verfahren verringert die Empfindlichkeit des Empfangstraktes erheblich und sollte nur in den Bereichen eingeschaltet werden, in denen auch Clutter auftritt, zum Beispiel im Nahbereich.
- Vom beobachtenden Radar weit entfernte Objekte, die tangential am Radar vorbeifliegen, haben eine zu kleine Radialgeschwindigkeit und werden somit ebenfalls unterdrückt.
- Durch die Periodizität der Schwingungen kann es vorkommen, dass die Phasenverschiebung des Echosignals ein Vielfaches von 360° aufweist und somit den gleichen Wert, wie 0° hat. Hier wird dann von einer Blindgeschwindigkeit gesprochen, die beim Puls-Pair-Processing durch zusätzliche Schaltungsmaßnahmen unterdrückt werden muss.
- große Volumenziele (Wolken) können durch den Wind ebenfalls eine Dopplerfrequenz erhalten und werden dann auch auf dem Display dargestellt. Eine Windkompensation kann dieses Problem teilweise beheben.
- Windkrafträder in der Nähe von Radargeräten stören empfindlich das Radarbild, weil durch die Bewegung der Windmühlenflügel eine starke Dopplerfrequenz erzeugt wird.
Einzelnachweise
- ↑ Zwischenperiodenkompensation auf www.radartutorial.eu
- ↑ Hubschraubererkennung auf www.radartutorial.eu
Wikimedia Foundation.