- Hilbertmatrix
-
Die Hilbert-Matrix der Ordnung
 ist folgende quadratische, symmetrische, positiv definite Matrix:
ist folgende quadratische, symmetrische, positiv definite Matrix: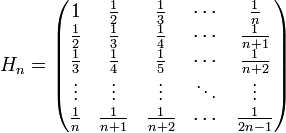 ,
,
die einzelnen Komponenten sind also durch
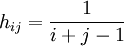 gegeben. Dem historischen Zugang entspricht die Darstellung mit Integral:
gegeben. Dem historischen Zugang entspricht die Darstellung mit Integral: 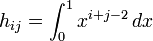 .
.Sie wurde vom deutschen Mathematiker David Hilbert 1894 im Zusammenhang mit der Theorie der Legendre-Polynome definiert. Da die Matrix positiv definit ist, existiert ihre Inverse, d. h. ein lineares Gleichungssystem mit diesen Koeffizienten ist eindeutig lösbar. Die Hilbert-Matrix bzw. das betreffende Gleichungssystem ist jedoch vergleichsweise schlecht konditioniert, und zwar umso schlechter, je größer n ist. Die Konditionszahl wächst exponentiell mit n; die Konditionszahl von H3 ist 526,16 (Frobeniusnorm), diejenige von H4 15'613,8. Das heißt, dass bei der Berechnung der Inversen (der Auflösung des Gleichungssystems) immer größere Zahlen auftreten, je größer n ist. Daher ist die Hilbert-Matrix ein klassischer Testfall für Computer-Programme zur Inversion von Matrizen bzw. Auflösung linearer Gleichungssysteme, z. B. mit dem Gauß-Verfahren, LR-Zerlegung, Cholesky-Zerlegung, usw. Alle Komponenten der inversen Matrix sind ganze Zahlen mit alternierenden Vorzeichen.
Die Komponenten der Inversen der Hilbert-Matrix können durch geschlossene Formeln direkt berechnet werden:
 ,
,
was man auch durch Binomialkoeffizienten ausdrücken kann:
 .
.
Im Spezialfall i = j = 1 reduziert sich das zu:
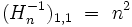 .
.
Dass die Inverse der Hilbert-Matrix exakt berechnet werden kann, ist besonders nützlich, wenn z. B. bei einem Test das Ergebnis der numerischen Inversion einer Hilbert-Matrix mit einer LR- oder Cholesky-Zerlegung, die naturgemäß durch Rundungsfehler beeinträchtigt ist, beurteilt werden soll.
Determinante
Die Determinante der Inversen der Hilbert-Matrix kann ebenfalls mit Hilfe folgender Formel exakt berechnet werden:
Als Determinante der Hilbert-Matrix ergibt sich somit der Reziprokwert der Inversen mit
 . Die Determinanten der Inversen für
. Die Determinanten der Inversen für  lauten damit 1, 12, 2160, 6048000 und 266716800000.
lauten damit 1, 12, 2160, 6048000 und 266716800000.Zahlenbeispiele für Inverse
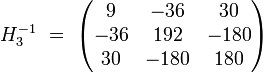
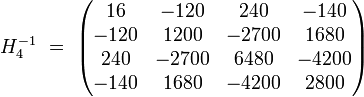
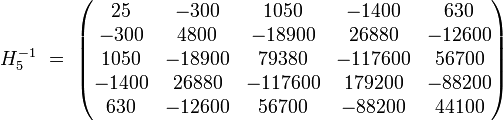
Aus obigen Formeln ergibt sich für die (exakte) Inverse in den Fällen n = 2,3,4,5:
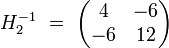 ,
,
 ,
,
 ,
,
 .
.
Für eigenes Experimentieren mit Hilbert- (und natürlich auch mit allen anderen) Matrizen sind moderne Mathematik-Software-Pakete wie MATLAB, Maple oder Mathematica nützlich. Z. B. mit Mathematica kann die letzte Inverse durch folgende Befehle berechnet werden:
Zusatzpaket einlesen:
In[1] := << LinearAlgebra`MatrixManipulation`
Inverse für n = 5 berechnen:
In[2] := Inverse[HilbertMatrix[5]]//TraditionalForm
Die schlechte Kondition der Hilbert-Matrix bedeutet praktisch, dass die Zeilen- (und folglich auch die Spalten-) Vektoren fast linear abhängig sind. Geometrisch äußert sich das u. a. darin, dass die Winkel zwischen den Zeilenvektoren sehr klein sind, und zwar zwischen den letzten Zeilenvektoren jeweils am kleinsten; so ist z. B. der Winkel zwischen dem letzten und dem vorletzten Zeilenvektor von H4 kleiner als 3° (im Bogenmaß: kleiner als
 ). Bei größeren n sind die Winkel entsprechend noch kleiner. Der Winkel zwischen dem ersten Zeilenvektor von H3 und der Ebene, die von den beiden anderen Zeilenvektoren aufgespannt wird, ist etwas kleiner als 1,3°, die entsprechenden Winkel für die beiden anderen Zeilenvektoren sind noch kleiner; auch diese Winkel sind bei größeren n noch kleiner.
). Bei größeren n sind die Winkel entsprechend noch kleiner. Der Winkel zwischen dem ersten Zeilenvektor von H3 und der Ebene, die von den beiden anderen Zeilenvektoren aufgespannt wird, ist etwas kleiner als 1,3°, die entsprechenden Winkel für die beiden anderen Zeilenvektoren sind noch kleiner; auch diese Winkel sind bei größeren n noch kleiner.Literatur
- David Hilbert: Ein Beitrag zur Theorie des Legendreschen Polynoms. Acta Mathematica, vol. 18, 155-159, 1894 (Volltext)
- Gene H. Golub & Charles F. Van Loan: Matrix computations. Johns Hopkins University Press, 1996 (3rd edition) ISBN 0-80185414-8 (in englischer Sprache)
Wikimedia Foundation.