- PT100
-
Pt100-Sensoren sind Temperaturfühler, die auf der Widerstandsänderung von Platin unter Temperatureinfluss basieren. Es handelt sich um Widerstandsthermometer, und zwar um Kaltleiter (PTC).
Zur Temperaturmessung im Bereich −200 °C bis 850 °C wird häufig die elektrische Widerstandsänderung eines Platindrahtes oder einer Platinschicht genutzt. Die Platin-Temperatursensoren werden durch ihren Nennwiderstand R0 bei einer Temperatur von 0 °C charakterisiert. Gebräuchliche Typen sind:
- Pt100 (R0= 100 Ohm)
- Pt200 (R0= 200 Ohm)
- Pt500 (R0= 500 Ohm)
- Pt1000 (R0= 1 kOhm)
- Die neue Pt-Generation besteht aus dem Pt3000, Pt6000 und Pt9000.
Die Widerstandsänderung ist in DIN IEC 60751 festgelegt.
Vorteil der Standardisierung des Nennwiderstands und der Widerstandsänderung ist die leichte Austauschbarkeit der Temperaturfühler, ohne dass anschließend eine Neukalibrierung der Messkette notwendig wird. Als Widerstandsthermometer ist das Pt100 genauer als z. B. Thermoelemente.
Inhaltsverzeichnis
Aufbau
Platin-Temperatursensoren lassen sich in zwei Untergruppen aufteilen:
Platindraht-Sensoren
Das temperaturempfindliche Element wird von einem Platindraht gebildet. Der sehr dünne und lange Draht wird mehrfach wendelförmig gewickelt, um Platz zu sparen. Der Abgleich des Nennwiderstands erfolgt durch Kürzen des Platindrahts. Je nach Qualität des Sensors wird der gewendelte Draht freitragend, auf einem Glasstab gewickelt oder eingebettet in eine Keramikmasse in einem Glas- oder Keramikröhrchen als Gehäuse untergebracht. Der Platindraht muss dabei möglichst frei von mechanischen Spannungen gehalten werden, da diese das Messergebnis verfälschen würden. Die Enden des Platindrahts werden mit den aus dem Gehäuse ragenden Anschlussdrähten verschweißt. Die Enden des Röhrchens werden durch Einschmelzen (bei Glasgehäusen) oder durch Verguss mit Keramikmasse (bei Keramikgehäusen) hermetisch verschlossen, um den Platindraht vor chemischen Einflüssen zu schützen.
Vorteil von Platindraht-Sensoren ist ihre hohe Genauigkeit und Langzeitstabilität, nachteilig ist der relativ hohe Aufwand für Fertigung und Abgleich.
Dünnschicht-Sensoren
Das Platin wird im Dünnschichtverfahren mäanderförmig auf einen Keramikträger aufgebracht. Nach dem Bonden der Anschlussdrähte und dem Abgleich des Nennwiderstands durch Lasertrimmen wird die Platinschicht mit einem Glasüberzug versehen, um sie vor chemischen Einflüssen zu schützen. Der so hergestellte Dünnschicht-Sensor kann zusätzlich in ein Glas- oder Keramikröhrchen eingebaut und hermetisch verschlossen werden, um seine mechanische und chemische Beständigkeit zu erhöhen.
Vorteil von Dünnschicht-Sensoren ist ihr rationelles Herstellung- und Abgleichverfahren, nachteilig sind die gegenüber den Platindraht-Sensoren geringere Genauigkeit und Langzeitstabilität.
Bauformen
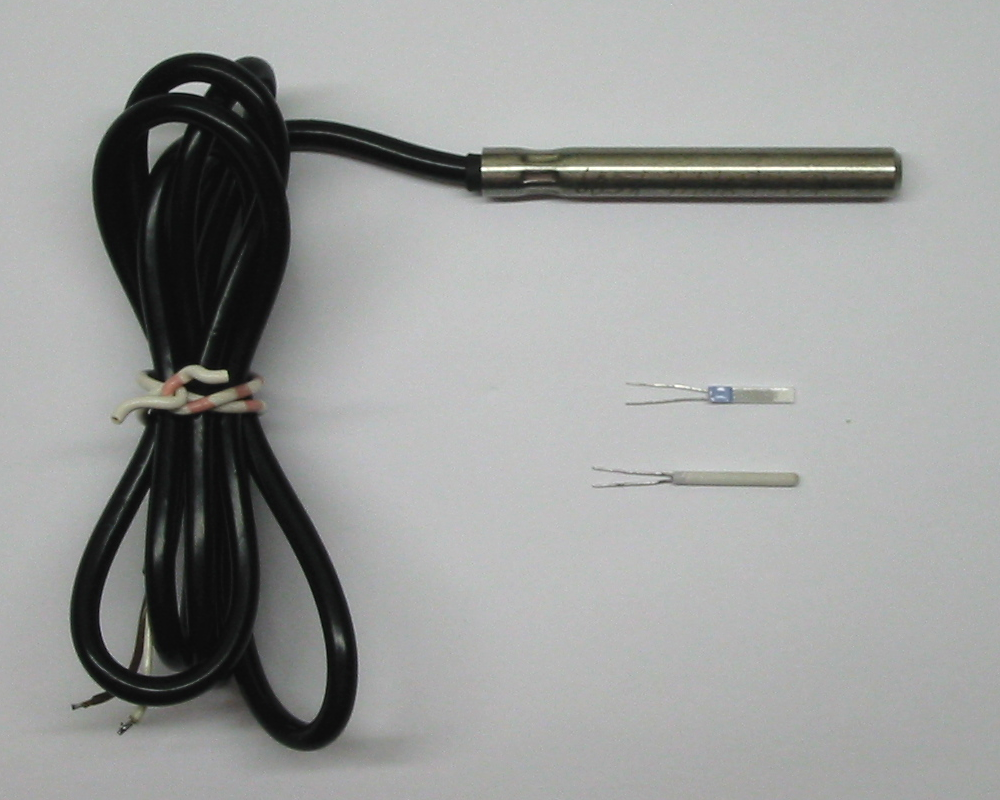
 Verschiedene Pt100-Sensoren
Verschiedene Pt100-SensorenGehäuse
Pt100-Widerstandsthermometer gibt es in verschiedenen Bauformen. Der einfachste Fall ist der Sensor ohne weitere Umhüllung (mittlerer und unterer Sensor im Bild rechts). Für den Einsatz bei geringer chemischer und mechanischer Beanspruchung, zum Beispiel zur Temperaturmessung innerhalb von Geräten, ist kein weiterer Schutz vor Umwelteinflüssen nötig. Der elektrische Anschluss kann beispielsweise durch Einlöten in eine Platine oder durch Oberflächenmontage (SMD) erfolgen.
Im industriellen Einsatz hingegen sind der Schutz des Sensors und seine einfache Montierbarkeit entscheidend. Beides wird durch den Einbau des Sensors in standardisierte Gehäuse erreicht. Durch Einbau des Pt100-Sensors in feste oder biegsame Rohre aus korrosionsbeständigem Stahl entsteht zum Beispiel ein sogenannter Mantelfühler (oberer Sensor im Bild rechts), der häufig noch zusätzlich durch eine Tauchhülse vom zu messenden Medium getrennt wird. Weitere Ausführungen sind Sensoren zum Messen von Gastemperaturen oder zum Einstechen in das zu messende Objekt. Der elektrische Anschluss dieser Sensoren wird durch fest montierte Leitungen oder Steckverbinder hergestellt.
Anschluss
Die elektrische Verbindung vom Pt100-Sensor zur auswertenden Elektronik kann im Zweileiter-, Dreileiter- oder Vierleiterverfahren erfolgen. Beim Dreileiter- und Vierleiterverfahren soll der Fehler durch den Eigenwiderstand der Sensor-Anschlussdrähte eliminiert werden. Hierzu wird beim Dreileiterverfahren ein Ende mit zwei Anschlussdrähten ausgerüstet, beim Vierleiterverfahren werden beide Enden mit zwei Anschlussdrähten ausgerüstet.
Auswertung
Die Auswertung des Sensor-Widerstands erfolgt üblicherweise, indem der Spannungsabfall an dem von einem konstanten Messstrom durchflossenen Sensor gemessen wird. Damit ist die Spannungsänderung dU annähernd proportional zur Widerstandsänderung dR. Bei der Wahl des Messstroms muss zwischen dem erzielbaren Nutzsignal, das mit dem Messstrom steigt, und dem ebenfalls steigenden Messfehler durch Eigenerwärmung des Sensors abgewogen werden.
Die Messschaltungen sind im Artikel Widerstandsthermometer ausführlich beschrieben; hier nur eine Übersicht.
Zweileiterschaltung
Bei der Zweileiterschaltung addiert sich der Widerstand der Messleitung als ein in Reihe geschalteter Widerstand zum Sensor und fließt in das Messergebnis ein. Durch ein Abgleichen mit dem Ergänzungswiderstand kann der Einfluss des Leitungswiderstandes kompensiert werden. Es bleibt der Nachteil des temperaturabhängigen Anteils des Zuleitungswiderstandes.
Dreileiterschaltung
Bei der Dreileiterschaltung wird der Pt100-Widerstand auf einer Seite mit nur einer Leitung, auf der anderen mit zwei Leitungen angeschlossen. Mit Hilfe der auf einer Seite angebrachten dritten Leitung als Fühlerleitung wird der Leitungswiderstand gemessen und kompensiert. Hierzu müssen jedoch die zwei stromführenden Leitungswiderstände gleich groß sein (es sind also jeweils Adern gleicher Dicke und Länge zu verwenden). Der Vorteil gegenüber der Zweileiterschaltung ist, dass lange Anschlußleitungen benutzt werden können ohne das Messergebnis durch den Leitungswiderstand zu verfälschen. Der Vorteil gegenüber der Vierleiterschaltung ist der geringere Kabelverbrauch. Für Präzisionsmessungen ist jedoch in bestimmten Fällen die Vierleiterschaltung zu bevorzugen.
Vierleiterschaltung
Bei der Vierleitermessung werden getrennte Leitungspaare für den Speisestrom des Sensors und für die Messung des Spannungsabfalls am Sensor verwendet. Da in den Fühlerleitungen zur Spannungsmessung ein vernachlässigbar kleiner Mess-Strom fließt, ist die Beeinflussung des Messergebnisses durch den Leitungswiderstand minimal. Die Länge der Anschlussleitung darf in Vierleiterschaltung sehr groß sein und es dürfen Adern unterschiedlichen Querschnitts verwendet werden. Die Vierleiterschaltung ist sogar in weiten Grenzen unempfindlich für Kontaktwiderstände in Anschlussklemmen oder Steckkontakten, welche unterschiedlich groß ausfallen können. Deshalb ist die Vierleiterschaltung für Präzisionsmessungen am besten geeignet.
Widerstandskennlinien
Der Warmwiderstand R eines Platin-Temperatursensors mit dem Nennwiderstand R0 lässt sich bei gegebener Temperatur T nach den folgenden Gleichungen berechnen (In DIN EN 60751 werden nur die beiden unteren Gleichungen aufgeführt).
Im Temperaturbereich zwischen 0 und 100 °C gilt näherungsweise die lineare Funktion (Polynom 1. Grades) der Temperatur T (in °C):
- R = R0 · (1 + a · T)
- a = 3,85 · 10-3 / °C
Im Bereich bis 850 °C, oder bei höheren Anforderungen an die Genauigkeit auch im Bereich zwischen 0 und 100 °C, verwendet man zur Linearisierung eine quadratische Funktion (Polynom 2. Grades):
- R = R0 · (1 + a · T + b · T2)
- a = 3,9083 · 10-3 / °C
- b = -5,775 · 10-7 / °C2
Im Bereich unter 0 °C verwendet man ein Polynom 4. Grades:
- R = R0 ·(1 + a ·T + b · T2 + c · (T − 100 °C)· T3)
- a = 3,9083 · 10-3 / °C
- b = -5,775 · 10-7 / °C2
- c = -4,183 · 10-12 / °C4
Normalerweise wird R gemessen und die Temperatur T gesucht.
Genauigkeitsklassen
Bedingt durch die Herstellungstoleranzen werden Platin-Temperatursensoren in die Klassen A und B eingeteilt. Diese beschreiben die Abhängigkeit des zulässigen Temperaturfehlers dT von der realen Temperatur T.
Fehlergrenzen der Klassen in °C:
- Klasse A: dT = ± (0,15 °C + 0,002 · T)
- Klasse B: dT = ± (0,30 °C + 0,005 · T)
- 1/3 Klasse B: dT = ± 1/3 · (0,30 °C + 0,005 · T)
Im Juli 2008 wurde die Norm IEC 60751 aktualisiert und enthält jetzt vier Genauigkeitsklassen:
Fehlergrenzen der Klassen in °C:
- Klasse AA: dT = ± (0,1 °C + 0,0017 · T)
- Klasse A: dT = ± (0,15 °C + 0,002 · T)
- Klasse B: dT = ± (0,30 °C + 0,005 · T)
- Klasse C: dT = ± (0,6 °C + 0,01 · T)
Siehe auch
Linearisierung von resistiven Sensoren Linearisierung und Formelumkehr nach T=... durch Tabellenkalkulation
Weblinks
Wikimedia Foundation.