- Autorotation
-
Autorotation ist das nur durch Luftströmung (Fahrtwind) erzeugte freie Rotieren eines Hubschrauberrotors oder Flugkörpers.
Beim Rotor eines Drehflügelflugzeugs setzen die Rotorblätter die Energie des Luftstroms dabei in dynamischen Auftrieb um, vergleichbar dem Tragflügel eines Starrflügelflugzeugs. Bei Starrflüglern ist die Autorotation eine Drehung um die Längsachse, die durch einen asymmetrischen Strömungsabriss an den Tragflächen ausgelöst wird (Gerissene Rolle, Trudeln). Autorotation ist auch ein Prinzip der Meteorochorie (Ausbreitungsmechanismus von Pflanzen mit dem Wind): Die Flügelfrüchte werden in Rotation versetzt, in der Fallgeschwindigkeit gebremst und dadurch weiter vertragen.
Inhaltsverzeichnis
Autorotation bei Drehflügelflugzeugen
Tragschrauber
Bei einem Tragschrauber (Autogiro, Gyroplane, Gyrokopter) dient ein antriebsloser Rotor anstelle fester Tragflächen der Erzeugung des Auftriebs. Der Vortrieb erfolgt durch einen Motor und Propeller oder durch Schleppen. Damit befindet sich der Tragschrauber − im Gegensatz zum Hubschrauber − permanent in Autorotation.
Hubschrauber
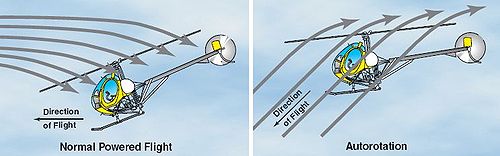
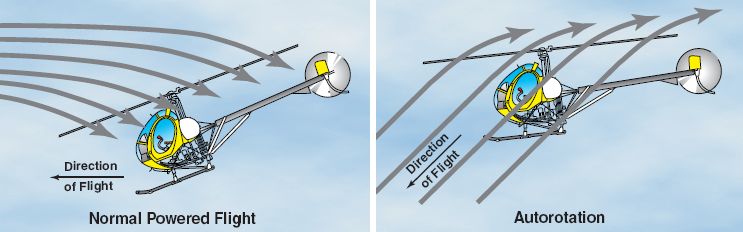
Die Autorotation ermöglicht es einem Hubschrauber, ohne angetriebenen Hauptrotor zu landen. Sie ist Basis des Notmanövers nach Ausfall des Antriebes oder notwendiger Drosselung des Antriebes nach Ausfall des Heckrotors. Sie ist vergleichbar mit dem Gleiten eines Flugzeugs ohne (funktionierenden) Motor und gliedert sich in zwei Phasen:
In der ersten Phase werden Höhe und Geschwindigkeit des Fluggerätes im kontrollierten, aber relativ steilen Gleitflug in Drehzahl des Rotors umgewandelt, die Luftströmung von unten („Fahrtwind“) bewirkt den Antrieb des Rotors. Dazu wird der Anstellwinkel des Rotors mit dem Kollektivhebel (Pitch) sehr niedrig eingestellt. Somit hat der Rotor einen geringen Widerstand, erzeugt aber nur noch wenig Auftrieb. Das Prinzip der Auftriebserzeugung gleicht in diesem Flugzustand dem des Tragschraubers. In dieser Phase soll bei beherrschbarer Geschwindigkeit und Sinkrate möglichst viel Rotationsenergie im Rotor aufgenommen werden. Als optimal gilt, abhängig vom Typ des Fluggeräts, eine Geschwindigkeit von 110 bis 130 km/h bei einer Sinkrate von 5 bis 10 m/s. Die Rotordrehzahl wird im Bereich um 100% gehalten − die Steuerung erfolgt mit dem Kollektiv. Um eine „Streckung“ des Flugweges zu erreichen, kann die Rotordrehzahl reduziert werden, je nach Muster auf bis zu 85 Prozent der Rotationsgeschwindigkeit bei gleichzeitiger Erhöhung der Geschwindigkeit. Dadurch kann ein etwas weiter entfernter Notlandeplatz erreicht werden.
In der zweiten Phase kurz über dem Boden wird durch starkes Anstellen des Rotors (flare) wieder mehr Auftrieb erzeugt, wobei die im drehenden Rotor gespeicherte kinetische Energie kurzzeitig in stärkeren Auftrieb umgewandelt und somit ein relativ weiches Aufsetzen ermöglicht wird.
Die Autorotationslandung stellt hohe Anforderungen an den Piloten und erfordert regelmäßiges Training, da das richtige Maß und der Zeitpunkt der Pitch-Veränderung präzise getroffen werden müssen. Dies ist vor allem darin begründet, dass die kinetische Energie des Rotors nur einmal zur Auftriebserhöhung (nötig zum Bremsen des raschen Sinkflugs während der Abstiegsphase) zur Verfügung steht. Wird der Anstellwinkel zu früh erhöht, ist der Hubschrauber schon in zu großer Höhe abgebremst und kann dann bei nachlassender Drehgeschwindigkeit des Hauptrotors „durchsacken“. Wird der Anstellwinkel zu spät erhöht, reicht die verbleibende Flughöhe nicht mehr aus, um den Hubschrauber ausreichend abzubremsen.
Für die Durchführbarkeit einer Autorotationslandung ist die Flughöhe entscheidend: Nur bei ausreichender Höhe über dem Boden kann ein (aufgrund etwa eines Motorausfalls) zu langsam drehender Rotor in der ersten Phase der Autorotationslandung wieder ausreichend Fahrt aufnehmen.
Literatur
- Ernst Götsch: Luftfahrzeugtechnik. Motorbuchverlag, Stuttgart 2003, ISBN 3-613-02006-8.
Weblinks
Wikimedia Foundation.