- Zustandsraumbeschreibung
-
Der Zustandsraum bezeichnet die Beschreibung eines dynamischen Systems im Zeitbereich. Hierbei werden die Einzelzustände des Systems zu einem Vektor zusammengefasst, dem Zustandsvektor, der als Ortsvektor eines Punkts im Zustandsraum interpretiert wird. Der Zustandsvektor bewegt sich zeitlich auf einer Kurve, der Trajektorie im Zustandsraum. Für ein gegebenes Eingangssignal geht dabei durch jeden Punkt des Zustandsraums genau eine Trajektorie, was (im zweidimensionalen Fall) graphische Darstellungen ermöglicht. Es handelt sich mathematisch gesehen um einen Phasenraum.
Die Zustandsraumbeschreibung hat gegenüber der Darstellung im Frequenzbereich den Vorteil, dass damit auch nichtlineare und zeitvariante Systeme beschrieben werden können. Auch wird durch die Übertragungsfunktion (ebenso wie durch die Impuls- oder Sprungantwort im Zeitbereich) lediglich das Ein-/Ausgangsverhalten beschrieben, nicht jedoch das, was innerhalb des Systems geschieht.
Inhaltsverzeichnis
Nichtlineare Zustandsgleichungen
Ein nichtlineares System n-ter Ordnung kann durch ein System nichtlinearer Differenzialgleichungen 1. Ordnung
oder kompakter als Vektordifferenzialgleichung
geschrieben werden.
für den Ruhepunkt
 gilt
giltIst
 die Abweichung des Systems vom Ruhepunkt, dann gilt
die Abweichung des Systems vom Ruhepunkt, dann giltund
 .
.
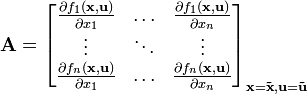
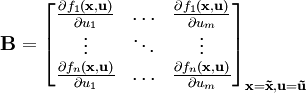
Mit der mehrdimensionalen Taylor-Reihe wird das System um den Ruhepunkt linearisiert zu

mit den Jacobi-Matrizen
und
Beschreibung linearer Systeme
Zeitkontinuierliche lineare Systeme werden durch die lineare Differentialgleichung n-ter Ordnung
beschrieben. Falls die Koeffizienten di und nk alle konstant sind ist die Laplace-Transformation ausführbar und es gilt die Übertragungsfunktion
 .
.
Eine Differentialgleichung n-ter Ordnung kann in ein System von n Differentialgleichungen 1. Ordnung
überführt werden.
Zeitdiskrete lineare Systeme werden durch die lineare Differenzengleichung n-ter Ordnung
beschrieben. Falls die Koeffizienten ai und bj alle konstant sind ist die z-Transformation ausführbar und es gilt die Übertragungsfunktion
 .
.
Eine Differenzengleichung n-ter Ordnung kann in ein System von n Differenzengleichungen 1. Ordnung
überführt werden.
Lineare Zustandsgleichungen
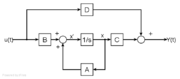 Signalflussplan Zustandsraum
Signalflussplan ZustandsraumFür zeitkontinuierliche Systeme lauten die linearen Grundgleichungen in vektorieller Form:


Der Zustand x ist der Zustandsvektor. Über die Matrizen
 und
und  sind die Verkettungen der einzelnen Zustände, samt die Zugriffe über die Steuervariablen (Eingangsgrößen)
sind die Verkettungen der einzelnen Zustände, samt die Zugriffe über die Steuervariablen (Eingangsgrößen)  darstellbar. Die Matrix wird als Systemmatrix, als Steuermatrix bezeichnet. Mittels der Koppel- oder Beobachtungsmatrix
darstellbar. Die Matrix wird als Systemmatrix, als Steuermatrix bezeichnet. Mittels der Koppel- oder Beobachtungsmatrix  sind die Verkettungen der Ausgangsgrößen
sind die Verkettungen der Ausgangsgrößen  beschreibbar. Die Durchgangsmatrix
beschreibbar. Die Durchgangsmatrix  beschreibt die Durchgriffe des Systems, sie ist bei nicht sprungfähigen Systemen Null.
beschreibt die Durchgriffe des Systems, sie ist bei nicht sprungfähigen Systemen Null.Einen wichtigen Sonderfall stellen Systeme mit einer Ein- und einer Ausgangsgröße dar (SISO Single Input, Single-Output Systeme). Hier sind
und Vektoren und ein Skalar. Es werden dann häufig die Formelzeichen  ,
,  und
und  verwendet.
verwendet.In vielen Fällen interessiert anstelle eines kontinuierlichen Verlaufs nur der Systemzustand zu diskreten Zeitpunkten, beispielsweise den Abtastzeitpunkten bei Regelung durch einen Digitalrechner. In diesem Fall ist
 anstelle einer vektorwertigen Funktion der Zeit eine Folge
anstelle einer vektorwertigen Funktion der Zeit eine Folge  von Vektoren. An die Stelle der Zustandsdifferentialgleichung tritt dann eine Differenzengleichung.
von Vektoren. An die Stelle der Zustandsdifferentialgleichung tritt dann eine Differenzengleichung.Die Typen der linearen Grundgleichungen:
System-Typ Zustandsraum-Modell Kontinuierlich Zeitinvariant 

Kontinuierlich Zeitvariant 

Diskret Zeitinvariant 

Diskret Zeitvariant 

Laplace-Transformierte
Kontinuierlich Zeitinvariant

Z-Transformierte
Diskret Zeitinvariant

Für die letzten beiden Fälle wurde davon ausgegangen, dass der Anfangszustand des Systems
 ist (siehe Differentiationssatz der Laplace-Transformation bzw. Differenzensatz der Z-Transformation).
ist (siehe Differentiationssatz der Laplace-Transformation bzw. Differenzensatz der Z-Transformation).Die zeitdiskrete Zustandsdarstellung wird aus der kontinuierlichen Form mittels Diskretisierung über einer festen Zeitschrittweite T in der Form

gewonnen. Gilt
 ergibt das Integral
ergibt das Integral .
.Die diskrete Form ist besonders für Berechnungen in Echtzeit geeignet. In Echtzeit wird zuerst die Ausgangsgleichung gerechnet, und danach erst die Zustandsdifferenzengleichung zur Ermittlung der Zustände für den nächsten Berechnungsschritt. Die zeitkontinuierliche Darstellung eignet sich hingegen gut für Simulationen ohne Echtzeit-Ansprüche, durch numerische Integration. Die Exaktheit kann hier durch die Wahl des Integrationsverfahrens und die Anpassung der statischen oder dynamischen Schrittweite beeinflusst werden.
Von zentraler Bedeutung ist die Systemmatrix, aus der die Eigenwerte, und damit die Systemdynamik und deren Stabilität abgeleitet werden kann (charakteristisches Polynom). Ist die Durchgriffsmatrix keine Nullmatrix, haben die Systemeingänge zeitgleichen Einfluss auf die Ausgänge, was zu einer algebraischen Schleife führen kann.
Sind A, B, C, D konstant, so ist das System linear und zeitinvariant, d. h. ein sog. LZI-System.
Ähnlichkeitstransformation
Die Zustandsraumdarstellung ist nicht eindeutig. Zum gleichen System existieren unendlich viele Zustandsraumdarstellungen. Anstatt der gewohnten Zustandsvariablen
 kann man auch einen neuen Satz an Zustandsvariablen
kann man auch einen neuen Satz an Zustandsvariablen  benutzen, falls man durch beschreiben kann.
benutzen, falls man durch beschreiben kann.  , wobei
, wobei  eine reguläre, lineare Transformationsmatrix ist, d. h. muss durch ohne Hinzufügen von Eingängen oder Ableitungen beschreibbar sein.
eine reguläre, lineare Transformationsmatrix ist, d. h. muss durch ohne Hinzufügen von Eingängen oder Ableitungen beschreibbar sein.Es gilt dann:

Die neue Zustandsraumdarstellung beschreibt das gleiche System. Es ist deshalb selbstverständlich, dass alle Systemeigenschaften bei der Transformation unverändert bleiben.
Übertragungsfunktion
Die „Übertragungsfunktion“ eines kontinuierlichen zeitinvarianten Zustandsraum-Modells kann auf folgende Weise hergeleitet werden:
durch die Laplace-Transformation erhält man
womit
 in der Ausgangs-Gleichung substituiert wird
in der Ausgangs-Gleichung substituiert wirdund die Übertragungsfunkion ergibt

Hierbei entspricht
 der Einheitsmatrix
der Einheitsmatrix  .
.Allgemeine Lösung im Zeitbereich
Die allgemeine Lösung im Zeitbereich erhält man durch:


Schwierigkeiten kann dabei die Matrixexponentialfunktion bereiten, die analog zur skalaren Exponentialfunktion definiert ist durch die Potenzreihe

Um hier einen geschlossenen Ausdruck angeben zu können, ist es hilfreich,
mittels Hauptachsentransformation auf Diagonalgestalt zu transformieren. Für eine Diagonalmatrix der Form
ergibt sich dann die Matrixexponentialfunktion zu

Normalformen
Normalformen werden benutzt, um strukturelle Eigenschaften eines Systems klar hervor zu heben. Oft besitzt ein System in der Zustandsraumdarstellung Zustandsvariablen, welche sich im Übertragungsverhalten des Systems nicht bemerkbar machen. So kann es z. B. sein, dass sich Pole und Nullstellen kürzen, sodass diese keinerlei Einfluss auf die Übertragungsfunktion G(s) haben. Diesen Fall nennt man eine Nichtminimal-Realisierung des Systems, und dies führt dazu, dass das System entweder nicht steuerbar, nicht beobachtbar, oder weder steuerbar noch beobachtbar ist.
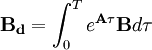
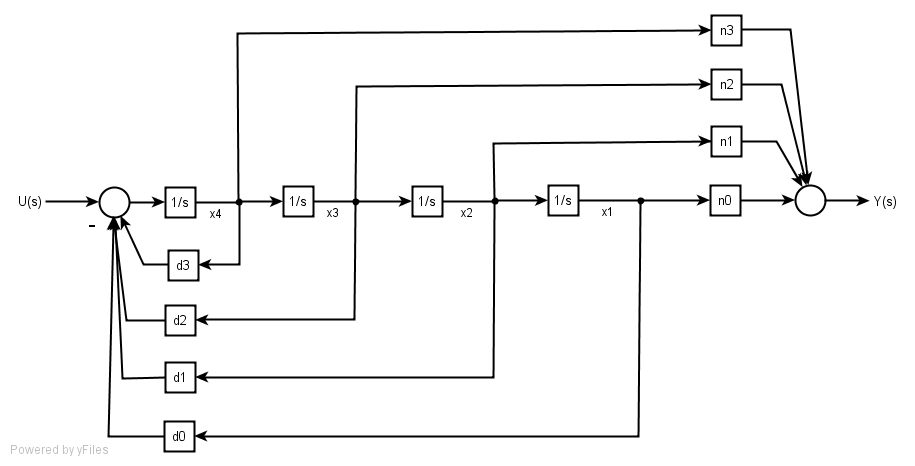
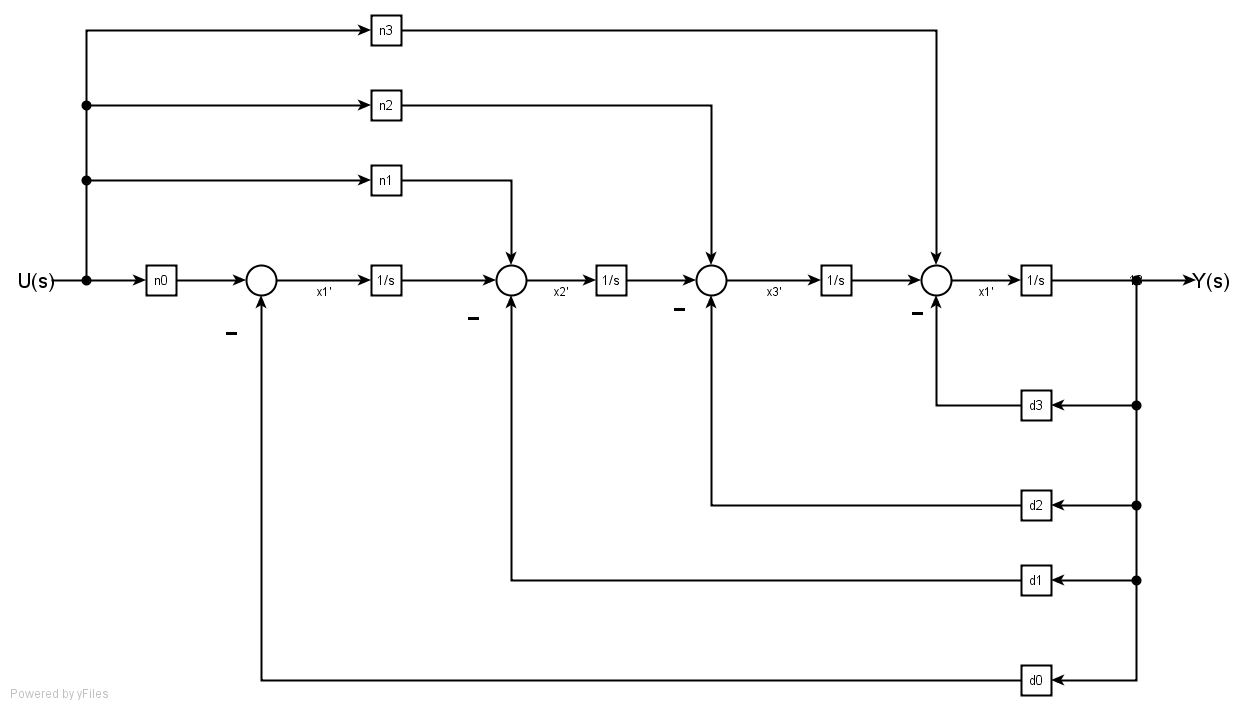
Regelungsnormalform
 Signalflussplan Regelungsnormalform
Signalflussplan RegelungsnormalformDie gegebene Übertragungsfunktion kann mit folgendem Ansatz in eine Zustandsraumdarstellung überführt werden.
Die gegebene Übertragungsfunktion wird in die Zähler- und Nennerfaktoren ausmultipliziert
 .
.
Zu dieser Übertragungsfunktion im Frequenzbereich gehört im Zeitbereich die Differentialgleichung (DGL):
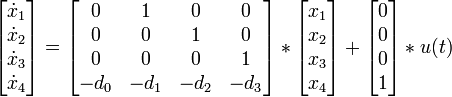
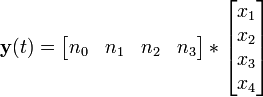
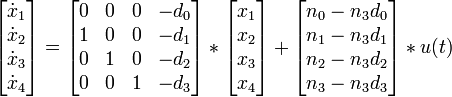
Aus dieser DGL ergeben sich für die ZR - Darstellung nach Regelungsnormalform folgende Zustandsgleichungen:
Die Koeffizienten können nun einfach direkt in die Zustandsmatrizen eingetragen werden:
Die Transformationsmatrix folgt aus der Steuerbarkeitsmatrix
 .
.Wenn
 ist das System steuerbar. Dann kann aus
ist das System steuerbar. Dann kann aus
die Transformationsmatrix

gebildet werden.
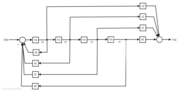
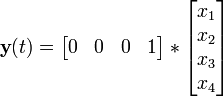
Beobachtungsnormalform
 Signalflussplan Beobachtungsnormalform
Signalflussplan BeobachtungsnormalformDie Differenzialgleichung nach
 aufgelöst
aufgelöstund 4 mal integriert ergibt
 .
.
Daraus lassen sich die Zustandsgrössen
und die Ausgangsgleichung
ableiten. Einsetzen von y ergibt



 .
.
oder in Matrix-Form
Die Transformationsmatrix folgt aus der Beobachtbarkeitsmatrix

Wenn
 ist das System beobachtbar. Dann kann aus
ist das System beobachtbar. Dann kann aus
die Transformationsmatrix

gebildet werden.
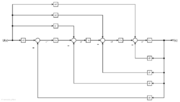
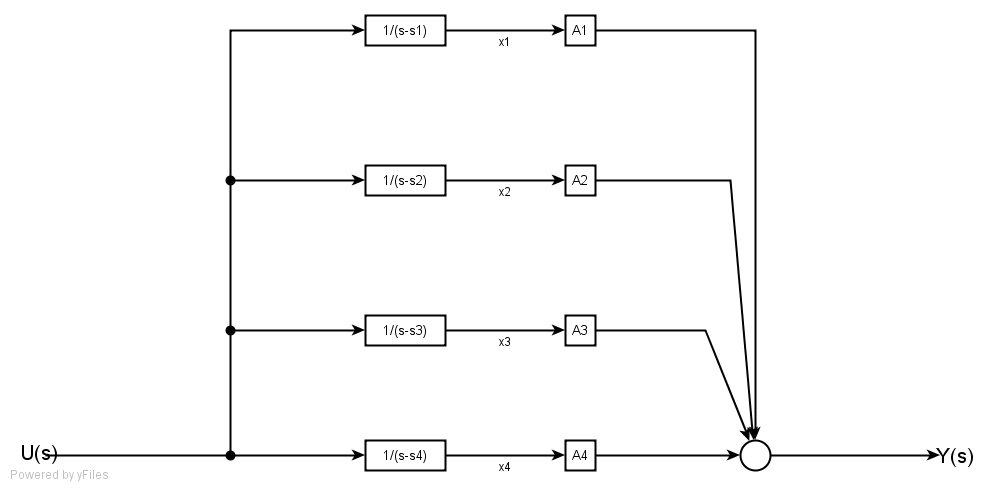
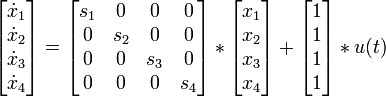
Kanonische Normalform
 Signalflussplan Diagonalform
Signalflussplan DiagonalformHat die Übertragungsfunktion G(s) einfache, reelle Polstellen skkann eine Partialbruchzerlegung der Form
durchgeführt werden. Aus
ergeben sich durch Rücktransformation die Zustandsgleichungen

und die Ausgangsgrösse
 .
.In Matrizenschreibweise
und
Die Zustandsgleichungen sind in diesem Fall entkoppelt. Die Transformationsmatrix wird aus den zu den Eigenwerten skder Systemmatrix gehörenden Eigenvektoren
 in der Form
in der Formgeschrieben.
Literatur
- Heinz Unbehauen: Regelungstechnik II, Friedr. Vieweg & Sohn Verlagsgesellschaft mbH, 1997, ISBN 3-528-63348-4

































Wikimedia Foundation.