- Blindgeschwindigkeit
-
Die Blindgeschwindigkeit ist eine Radialgeschwindigkeit des Flugzeuges, bei der die Phasenverschiebung des Echosignals von einer Impulsperiode zur folgenden 360° beträgt. Ziele, die sich mit Blindgeschwindigkeiten bewegen, werden im Radargerät von einer MTI- Schaltung wie Festziele unterdrückt. Die Dopplerfrequenz, die bei einer Blindgeschwindigkeit entsteht, wird auch Blindfrequenz genannt.
 Wenn die Dopplerfrequenz gleich der Impulsfolgefrequenz ist, sind alle Echoimpulse gleich groß.
Wenn die Dopplerfrequenz gleich der Impulsfolgefrequenz ist, sind alle Echoimpulse gleich groß.
 Zur Erkennung eines bewegten Zieles muss sich die Phasenlage des Echosignals ständig ändern.
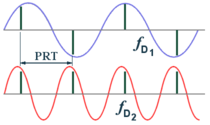
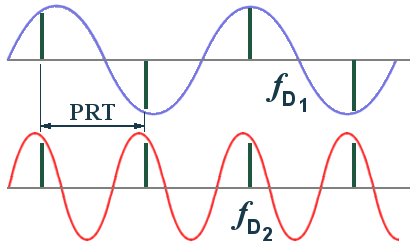
Zur Erkennung eines bewegten Zieles muss sich die Phasenlage des Echosignals ständig ändern.Beim Vergleich von zwei aufeinanderfolgenden Auslenkperioden kann der Fall auftreten, dass das Ziel sich mit einer Radialgeschwindigkeit bewegt, welche eine Phasenverschiebung von genau 360° bewirkt. Gemäß der Periodizität der Sinusfunktion kann dieser Fall sogar bei allen ganzzahligen Vielfachen (±n• 360°) von 360° auftreten. Da die Phasenverschiebung in diesen Fällen ebenfalls Null ist, wird das Ziel also nicht als bewegtes Ziel erkannt. Es fliegt mit einer Blindgeschwindigkeit und die MTI- Schaltung wird es wie ein Festziel, welches ja ebenfalls keinen Phasenunterschied zwischen den Impulsperioden aufweist, nicht zur Anzeige bringen können. Eine Phasenverschiebung kann also nur dann gemessen werden, wenn die Impulsfolgefrequenz sich von der Dopplerfrequenz unterscheidet. Wenn die Dopplerfrequenz gleich der Impulsfolgefrequenz ist, dann haben alle Echoimpulse die gleiche Phasenlage und das mit dieser Geschwindigkeit fliegende Flugzeug erscheint als Festziel. Ist die Dopplerfrequenz ungleich der Impulsfolgefrequenz, dann hat das Echosignal nach dem Phasendetektor eine sich ständig alternierende Amplitude.
Die Blindgeschwindigkeit ist abhängig von der Sendefrequenz des Radargerätes und von dessen Impulsfolgefrequenz.

- vBlind = eine der Blindgeschwindigkeiten
- λ = Wellenlänge der Sendefrequenz
- Ts = Impulsfolgeperiode
Der Faktor ½ in der Formel resultiert aus dem Umstand, dass bei einem Radar der Doppler-Effekt praktisch zweimal auftritt: einmal auf dem Hinweg zum Flugzeug und noch einmal auf dem Rückweg für das bereits mit einer Dopplerfrequenz behaftete Echosignal.
Einfache Maßnahmen gegen das Auftreten von Blindgeschwindigkeiten sind:
- ständiges Ändern der Sendefrequenz (Frequenz-Diversity Betrieb)
- ständiges Ändern der Impulsfolgefrequenz (Staggered PRT)
Bei digitalen Radargeräten, die mit dem Monopulsverfahren arbeiten, ist eine gestaggerte Impulsfolgefrequenz unwirksam, da ja nur ein bis maximal drei Sendeimpulse verwendet werden, um die Koordinaten des Zieles zu messen. Diese Geräte nutzen deshalb zwangsläufig das Frequenz-Diversity Verfahren, senden also auf zwei Frequenzen gleichzeitig. Eine Blindfrequenz kann nur auf einer Sendefrequenz auftreten. Auf der zweiten Sendefrequenz wird das Ziel dann mit Sicherheit als bewegtes Ziel erkannt.
Wikimedia Foundation.