- Frequenzrichter
-
Ein Frequenzumrichter ist ein Gerät, das aus einem Wechselstrom (auch Drehstrom) mit bestimmter Frequenz eine in Amplitude und Frequenz veränderte Spannung generiert. Mit dieser umgerichteten Spannung wird dann der Verbraucher (in der Regel ein Asynchronmotor) betrieben.
Ein Frequenzumrichter ist ein elektronisches Gerät. Früher wurden Netze unterschiedlicher Frequenz über rotierende Frequenzumformer gekoppelt. Allerdings werden in Bahnstromumformerwerken immer noch mechanische Anlagen verwendet.
 Vollelektronischer Kleinleistungs-Umrichter für den Betrieb an Asynchron-Drehstrommotoren
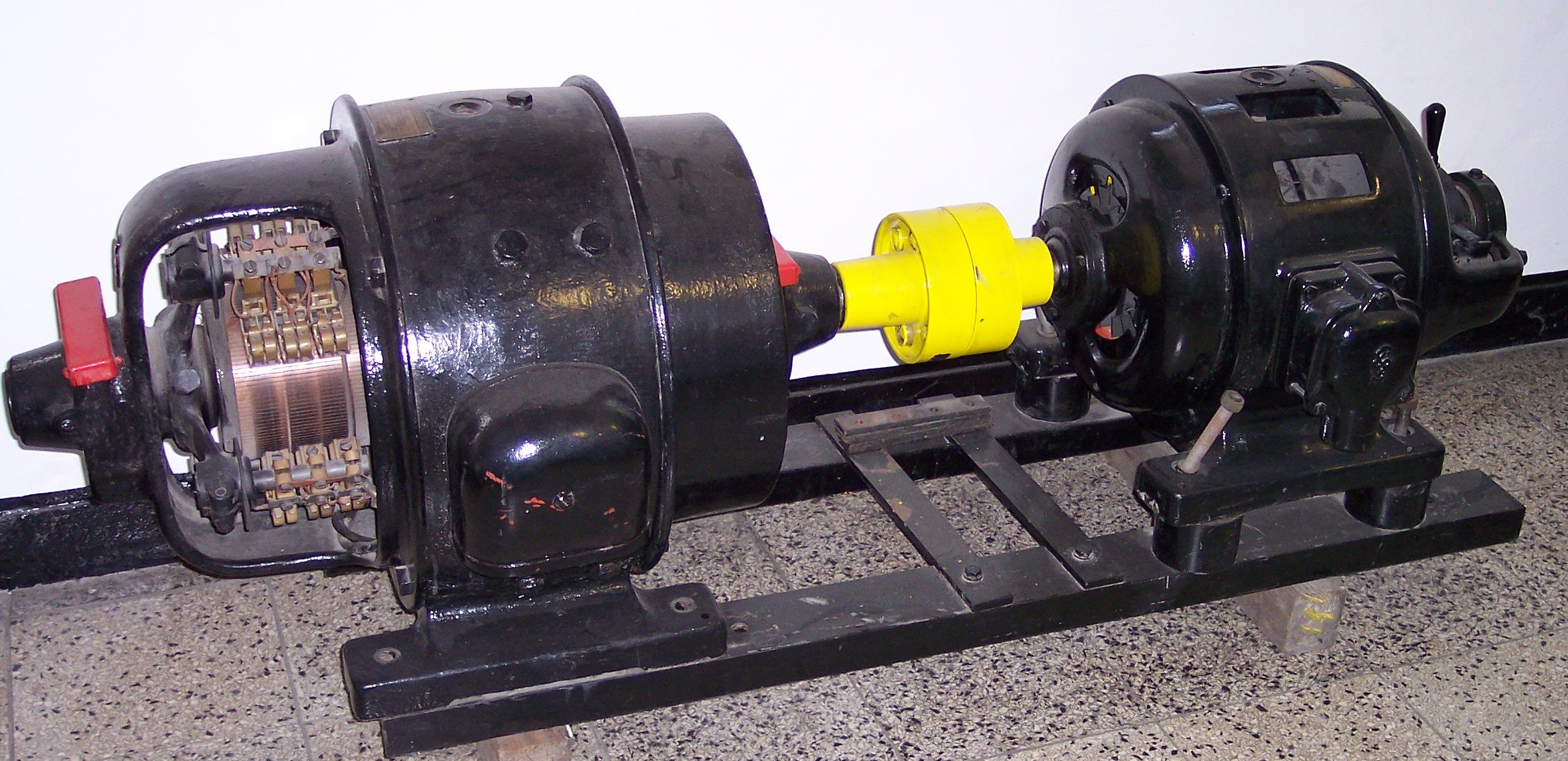
Vollelektronischer Kleinleistungs-Umrichter für den Betrieb an Asynchron-Drehstrommotoren Mechanischer Umformer, bestehend aus einer Elektromotor-Generatorkombination
Mechanischer Umformer, bestehend aus einer Elektromotor-Generatorkombination Prinzip eines Frequenzumrichters
Prinzip eines FrequenzumrichtersInhaltsverzeichnis
Grundaufbau
Im Prinzip besteht der elektronische (statische) Frequenzumrichter aus einem Gleichrichter, der einen Gleichstrom- oder Gleichspannungs-Zwischenkreis speist, und einem aus diesem Zwischenkreis gespeisten Wechselrichter. Der Wechselrichter arbeitet mit Schalttransistoren (Insulated Gate Bipolar Transistor, IGBT) oder Schaltthyristoren (Integrated Gate Commutated Thyristor, IGCT) und erzeugt eine pulsweitenmodulierte (PWM) Spannung, die in ihrem Mittelwert die Sinusspannung der gewünschten Frequenz und Amplitude ist. Die Induktivität des Motors besorgt die Glättung des Stromes. Die Höhe der resultierenden Ausgangsspannung und auch deren Frequenz können in weiten Grenzen geregelt werden. Es ist zu beachten, dass die Ausgangsströme des Wechselrichters noch annähernd Gleichstrom ähneln, lediglich die Spannung wird sinusförmig umgewandelt. Hintergrund ist, dass Asynchronmaschinen nur eine sinusförmige Wechselspannung brauchen um ein Drehfeld aufzubauen.
Die Speisung des Zwischenkreises kann auch mit einer aktiven Leistungsfaktorkorrektur-Stufe (PFC) erfolgen.
Um bremsen zu können, besitzen einfache 2-Quadranten-Frequenzumrichter einen sogenannten Brems-Chopper, der die überschüssige Energie aus dem Zwischenkreis in einen Bremswiderstand leitet und dort in Wärme umwandelt. Ansonsten würde die Zwischenkreisspannung ansteigen und die Kondensatoren zerstören.
Weiterhin gibt es Direktumrichter (sogenannte Matrixumrichter), bei denen über Halbleiterschalter jede Netzphase direkt mit jeder Phase der Last verbunden werden kann. Der Zwischenkreis mit der Gleichgröße entfällt somit. Ein Direktrichter mit Thyristoren kann jedoch nur Ausgangsfrequenzen kleiner der Eingangsfrequenz erzeugen, Zwischenkreisumrichter und Direktumrichter mit IGBT können dagegen auch Ausgangsfrequenzen erzeugen, die oberhalb der Eingangsfrequenz liegen (bis mehrere hundert Hz). Direktumrichter sind rückspeisefähig (4-Quadranten-Betrieb).
Ansteuerung
Frequenzumrichter für die Antriebstechnik verfügen neben den Leistungsanschlüssen meist über digitale Ein- und Ausgänge, einen Analogeingang sowie einen Analogausgang. Am Analogeingang kann z. B. ein Potentiometer zur Einstellung der Ausgangsfrequenz angeschlossen werden.
Zur analogen Ansteuerung werden die Einheitssignalpegel 0…10 V, 0…20 mA oder 4…20 mA genutzt. Es gibt auch Frequenzumrichter, die über Bussysteme, z. B. BACNet, LON, Modbus, CAN-BUS, PROFIBUS, PROFINET, Ethernet, EtherCAT oder auch über Ethernet Powerlink angesteuert werden.
Parametrierung
Umrichter können durch Parametrierung dem jeweils anzutreibenden Motor angepasst werden, um diesen optimal zu betreiben und zu schützen. Dies geschieht heute kaum noch durch Potentiometer und DIP-Schalter, sondern durch eine geeignete Tastatur/Anzeigeeinheit, die sich am Umrichter befindet und die die Navigation in einer Menüstruktur zulässt. Besonders komplexe Umrichter ermöglichen die Programmierung in einer eigenen Programmiersprache oder durch ein entsprechendes grafisches Programm am PC. Fertige Datensätze werden dann über eine Schnittstelle in den Umrichter geladen.
Ebenfalls ist es heutzutage üblich, den fertigen Parametersatz auf einem Speichermedium (z. B. Chip- und Flashkarten) zu speichern, das dann anschließend in den Frequenzumrichter gesteckt wird.
Einige Modelle können selbst die Antriebseigenschaften messen (häufig als „Autotune“ bezeichnet) und ihre eigenen Regelparameter im Rahmen der Inbetriebnahme selbständig einstellen. Zuweilen können sie auch programmierte Verfahrbewegungen selbstständig abarbeiten (Motion Control).
Anwendungsgebiete
Bei Frequenzumrichtern unterscheidet man im Großen und Ganzen zwischen zwei Hauptanwendungsgebieten, welche auch entscheiden, welcher Typ, also mit welcher Charakteristik, verwendet wird:
Pumpen- und Lüfteranwendungen
Hier wird zu Beginn (ab 0 Hz) fast kein Drehmoment benötigt, welches jedoch ungefähr quadratisch ansteigt und bei der Bemessungsdrehzahl dem Bemessungsdrehmoment entspricht.
Das Antriebsmoment sinkt quadratisch zur Drehzahl, damit sinkt das erforderliche Antriebsmoment bei einer Halbierung des Volumenstroms auf 25 %. Da sich die mechanische Antriebsleistung zu M×2×π×N berechnet, ist die Antriebsleistung jetzt nur noch ein achtel der Nennleistung. (M <=> Drehmoment, N <=> umdrehungen pro Sekunde) Eventuelle Verluste des Umrichters sind dabei nicht berücksichtigt.
Hebe- und Fortbewegungsanwendungen
Hier wird zu Beginn (ab 0 Hz) ein hohes Losbrechmoment benötigt, das das Bemessungsmoment weit übersteigt (je nach Anwendung ca 125 % - 200 %). Da sich der Rotor des Motors danach gleichmäßig dreht bzw. gleichmäßig beschleunigt, bleibt das benötigte Drehmoment konstant. Dieses Drehmoment bewegt sich meistens etwas unter der Bemessungsmomentenlinie des Motors.
Über den Umrichter kann hier auch ein Sanftanlauf der Anlage realisiert werden.
Technischer Hintergrund
Werden Asynchronmotoren direkt am Wechselspannungsnetz betrieben, haben sie eine von ihrer Polzahl und der Netzfrequenz abhängige feste Nenndrehzahl. Beim Anlauf entstehen hohe Stromspitzenwerte und das Drehmoment ist gering. Dem wird konventionell mit verschiedenen Mitteln entgegen gewirkt. Dazu gehören Stern-Dreieck-Schaltung, KUSA-Anlasser, Anlasstransformator und Thyristor-Anlasser mit Phasenanschnittsteuerung. Auf diese Weise kann jedoch kein höheres Drehmoment unterhalb der Nenndrehzahl erreicht werden, ein Betrieb oberhalb der Nenndrehzahl ist ebenfalls nicht möglich.
Erweiterter Drehzahlbereich
Frequenzumrichter ermöglichen es demgegenüber, stufenlos Drehzahlen von null bis zur Nenndrehzahl zu erreichen, ohne dass das Drehmoment sinkt (Grundstellbereich). Der Motor kann auch über Nenndrehfrequenz (Feldschwächbetrieb) betrieben werden, dann sinkt das abgegebene Moment jedoch ab, da die Betriebsspannung nicht weiter der erhöhten Frequenz angepasst werden kann (Siehe U/f Betrieb). Aufgrund dieser Eigenschaften sind Frequenzumrichter in der Industrie weit verbreitet und gestatten den Einsatz von preiswerten Standard-Asynchronmotoren in einem erweiterten Drehzahlbereich. Der Drehzahlbereich kann bei Motoren mit Stern-Dreieckwicklung, z. B. Sternschaltung 400 V 50 Hz / Dreieckschaltung 230 V 50 Hz, bei einem 400-V-Umrichter in Dreieckschaltung bis 87 Hz eingestellt (50 Hz x
 ) und dadurch mit höherer Drehzahl bei Nennmoment betrieben werden. Zu beachten ist jedoch, dass der Eigenlüfter eine höhere Belastung darstellt und die Eisenverluste (frequenzabhängig) steigen und dadurch der Motor das thermisch nicht, bzw. auch mechanisch nicht voll zulässt.
) und dadurch mit höherer Drehzahl bei Nennmoment betrieben werden. Zu beachten ist jedoch, dass der Eigenlüfter eine höhere Belastung darstellt und die Eisenverluste (frequenzabhängig) steigen und dadurch der Motor das thermisch nicht, bzw. auch mechanisch nicht voll zulässt.Anlauf mit hohem Drehmoment
Durch Programmierung einer Frequenzrampe zum Anlauf sind auch schwierige Anlaufbedingungen ohne starke Überstromspitzen zu bewältigen.
Mit einer absteigenden Frequenzrampe ist auch das Abbremsen möglich. Viele Frequenzumrichter können dabei selbst überwachen, ob der Motor noch innerhalb eines zulässigen Schlupfes läuft und somit ein „Abreißen“ des Drehfeldes verhindern. Umrichter mit Raumzeigermodulation (Space Vector Control) ermöglichen bei einem Asynchronmotor die getrennte Regelung von Drehmoment und Drehzahl, indem die Istfrequenz anhand der registrierten Rückwirkungen des Motors nachgeführt wird.Rückspeisung und Vierquadrantenbetrieb
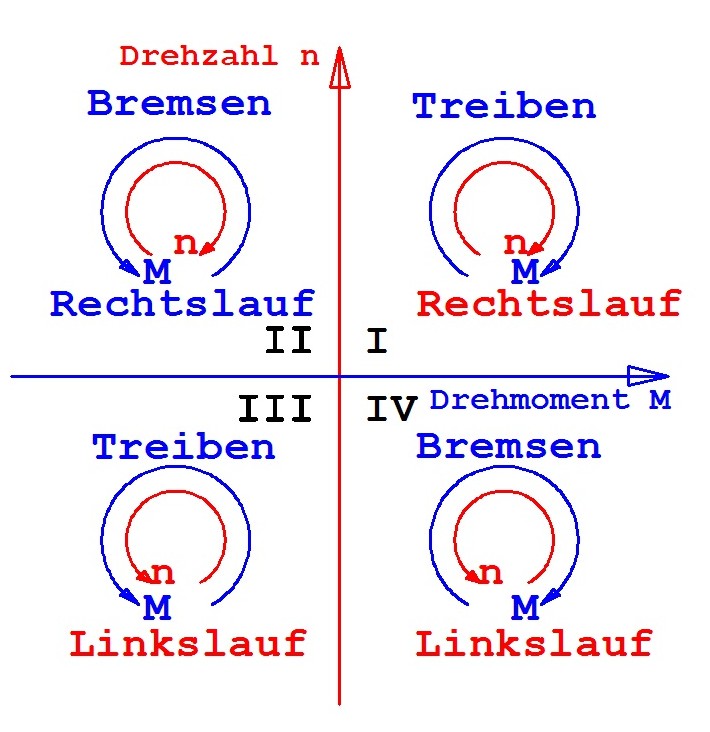
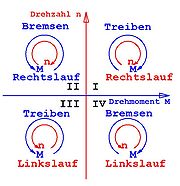 Vierquadrantenbetrieb eines Elektromotors
Vierquadrantenbetrieb eines ElektromotorsIst der Umrichter in der Lage, in beiden Drehrichtungen Energie vom Netz zum Motor und beim Bremsen auch zurück ins Netz zu übertragen, spricht man von Vierquadrantenbetrieb. Durch solche Wechselrichter lässt sich die Bremsenergie des Motors aus dem Zwischenkreis wieder in das Netz zurückspeisen.
Asynchronmotoren mit rückspeisefähigen Umrichtern können so auch bei wechselnden Drehzahlen als Generator betrieben werden. Dies ist insbesondere für Fahrzeuge und sonstige Antriebe interessant, die zyklisch bremsen müssen. Bei Lokomotiven oder anderen Fahrzeugen kann dadurch die Bremsenergie genutzt werden (Nutzbremsung). Hybrid-PKW speisen dabei in ihre Batterien.
Bei Windkraftanlagen und in kleinen Wasserkraftwerken kann auf diese Weise ein preiswerter Asynchrongenerator verwendet werden, ohne dass dessen Drehzahl an die Netzfrequenz gekoppelt ist.
Aber auch andere große Motoren speisen sinnvollerweise in das Netz zurück, z. B. Zentrifugen in Zuckerfabriken, Antriebe von Fahrstühlen und Kränen oder Belastungseinrichtungen auf Motorprüfständen.Einfache Frequenzumrichter (2-Quadrantenbetrieb) wandeln die Bremsenergie mit einem Brems-Chopper in einem Bremswiderstand in Wärme um. Um die Energie aus dem Zwischenkreis stattdessen zurück ins Netz speisen zu können, benötigt man einen netzgeführten Wechselrichter, der bei steigender Kondensatorspannung aus jenen gespeist wird. Solche Energierückspeise-Geräte können auch nachgerüstet werden. Sie werden dazu an einem oder mehreren 2-Quadranten-Frequenzumrichtern anstelle der Brems-Chopper angeschlossen[1]. Dadurch wird Vierquadrantenbetrieb erzielt.
Einsatz und Einschränkungen
Frequenzumrichter werden insbesondere an Drehstrommotoren eingesetzt, um deren Anlauf- und Drehzahlverhalten zu verbessern oder zu erweitern. Frequenzumrichter gibt es inzwischen auch für ein- oder zweiphasige Wechselstrommotoren wie z. B. Kondensatormotoren, um auch diese in der Drehzahl zu regeln. Dabei übernimmt der Frequenzumrichter ggf. die Bereitstellung der bislang vom Kondensator erzeugten zweiten Phase.
Es gibt auch eine Frequenzumrichtervariante, die lediglich in die einphasige Zuleitung geschaltet wird und wo dabei am Einphasenmotor mit Kondensator keine Änderungen vorzunehmen sind. Dies ist besonders interessant bei bereits vorhandenen Antrieben wie Pumpen, Lüftern, Tischbohrmaschinen oder Antrieben für Transportbänder.
Mit Einschränkungen können auch Spaltpolmotoren an Frequenzumrichtern betrieben werden.
Frequenzumrichter erzeugen starke elektrische Störsignale auf der Motorzuleitung, die nicht nur andere Verbraucher stören können, sondern auch im Motor zu einer erhöhten Isolierstoffbelastung führen. Die Motorzuleitung muss zur Vermeidung von Störabstrahlungen oft geschirmt werden. Abhilfe kann auch ein sog. Sinusfilter zwischen Umrichter und Motor schaffen. Solche Sinusfilter unterscheiden sich von einem Netzfilter durch ihre niedrigere Grenzfrequenz und höhere Belastbarkeit.
Bei Betrieb oberhalb der Nenndrehzahl treten im Motor erhöhte Wirbelstrom- und Hystereseverluste auf, was jedoch oft durch dessen ebenfalls schneller drehendes Lüfterrad ausgeglichen wird. Der Motor muss für die Frequenz für den Dauerbetrieb zugelassen sein. Langsamer drehende Motoren bis 3Hz, wie oft in der Industrie verwendet, werden durch Fremdlüfter gekühlt, deren Drehzahl von einem sogenannten Fremdnetz, also Drehstrom von 50 oder 60 Hz abhängt.
Frequenzumrichter verlangen aus diesen Gründen eine fachgerechte Installation. Die Hinweise der Hersteller sind dabei oft hilfreich.
Bau- und Betriebsarten
U/f-Betrieb
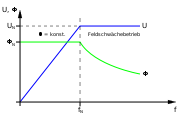 U/f-Kennline
U/f-KennlineDies ist die einfachste Betriebsweise eines Frequenzumrichter. Der Umrichter regelt die Motorspannung und die Frequenz in einem konstanten Verhältnis. Frequenz und Spannung sind zueinander proportional. Aufgrund des induktiven Verhaltens des Motors führt dies zu einem über weite Bereiche konstanten Drehmoment, ohne den Motor zu überlasten. Bei sehr geringen Drehzahlen führt diese Betriebsart aufgrund des ohmschen Widerstandes der Wicklung jedoch zu einem geringeren Drehmoment. Um dies zu beheben, kann oft eine Spannungsanhebung (Boost) im unteren Frequenzbereich eingestellt werden (I x R Kompensation).
Beim U/f-Betrieb variiert die Drehzahl des angeschlossenen Motors abhängig von dessen Belastung.
Eine Schlupfkompensation bzw. konstante Drehzahl kann nur mit einer Regelung mit einem Drehzahlgeber erreicht werden. U/f-Betrieb ist daher nur bei geringen Anforderungen an die Drehzahlkonstanz und ohne Schweranlauf ausreichend.Die obenstehende Kennlinie zeigt, dass bis Nennfrequenz der magnetische Fluss konstant bleibt. Wird ein Drehstrom-Asynchronmotor mit einem Frequenzumrichter über Nennfrequenz betrieben, so ist die Spannung am Höchstwert und dadurch sinkt der magnetische Fluss und folglich auch das Moment.
Feldorientierte Umrichter
Die Vektorregelung oder auch feldorientierte Regelung besteht aus einem Drehzahlregler auf der Basis eines unterlagerten Stromreglers. Die momentanen Blind- und Wirkstromkomponenten werden geregelt. In einem elektronisch im Umrichter abgelegten Motorenmodell werden die Motorkennwerte gespeichert oder ggf. sogar selbsttätig ermittelt und adaptiert. Das hat den Vorteil, dass es keine separate Drehzahlmessung und -rückführung geben muss, um Drehzahl und Moment zu regeln. Die rückgeführte, zur Regelung genutzte Größe ist vielmehr ausschließlich der Momentanstrom. Anhand dessen Größe und Phasenlage zur Spannung können alle erforderlichen Motorzustände (Drehzahl, Schlupf, Drehmoment und sogar die thermische Verlustleistung) ermittelt werden.
Auf diese Weise sind sehr hohe Drehzahl- und Momentenstellbereiche möglich. Typisch sind Regelbereiche für die Drehzahl von 1:120 (mit zusätzlichem Drehzahlgeber sogar bis 1:2000). Das Moment reicht von null bis zum Vierfachen des Motor-Nennmomentes.
Die meisten Frequenzumrichter benutzen heute DSP-Schaltkreise oder Mikrocontroller, um diese Informationen aus dem Motorstrom zu gewinnen und zu verarbeiten.Kommutierungsarten
Kommutierung nennt man analog zum Kommutator bei Gleichstrommaschinen die Steuerung der Stromzufuhr zu den Motorwicklungen durch die Halbleiterschalter im Frequenzumrichter.
Man unterscheidet folgende Kommutierungssarten:- Sinuskommutierte Pulsweitenmodulation (PWM, Space Vector PWM oder SVPWM für Synchron- und Asynchronmaschinen)
- Blockkommutierte PWM (für Synchronmaschinen)
- seltener: Hystereseregler (Zweipunktregler)
Bei einer Blockkommutierung werden immer genau 2 von 3 Drehstromwicklungen bestromt. Die dritte Wicklung ist unbenutzt und wird von einigen Frequenzumrichtern zur Vermessung der Gegen-EMK (Back-EMF) benutzt. Damit können permanenterregte Maschinen vom Frequenzumrichter ohne den sonst erforderlichen Lagegeber optimal kommutiert werden. Aufgrund der permanent konstanten magnetischen Durchflutung ergeben sich gegenüber einer Sinuskommutierung kaum Nachteile in der Welligkeit des Drehmoments oder des Wirkungsgrads. In Analogie zu einem Schrittmotor spricht man in dieser Betriebsart auch von einem 6-Schritt-Betrieb.
Zum Betrieb von Asynchronmaschinen ist eine Sinuskommutierung durch den Frequenzumrichter üblich (Sinusumrichter; die Pulsweiten werden sinusförmig moduliert). Hierbei sind immer genau 3 von 6 Halbleiter-Schaltern eingeschaltet. Die Erzeugung der Schaltsignale erfolgt in der Regel durch Mikrokontroller, welche speziell für Motoranwendungen in Ausführungen mit 6 PWM-Ausgängen erhältlich sind.
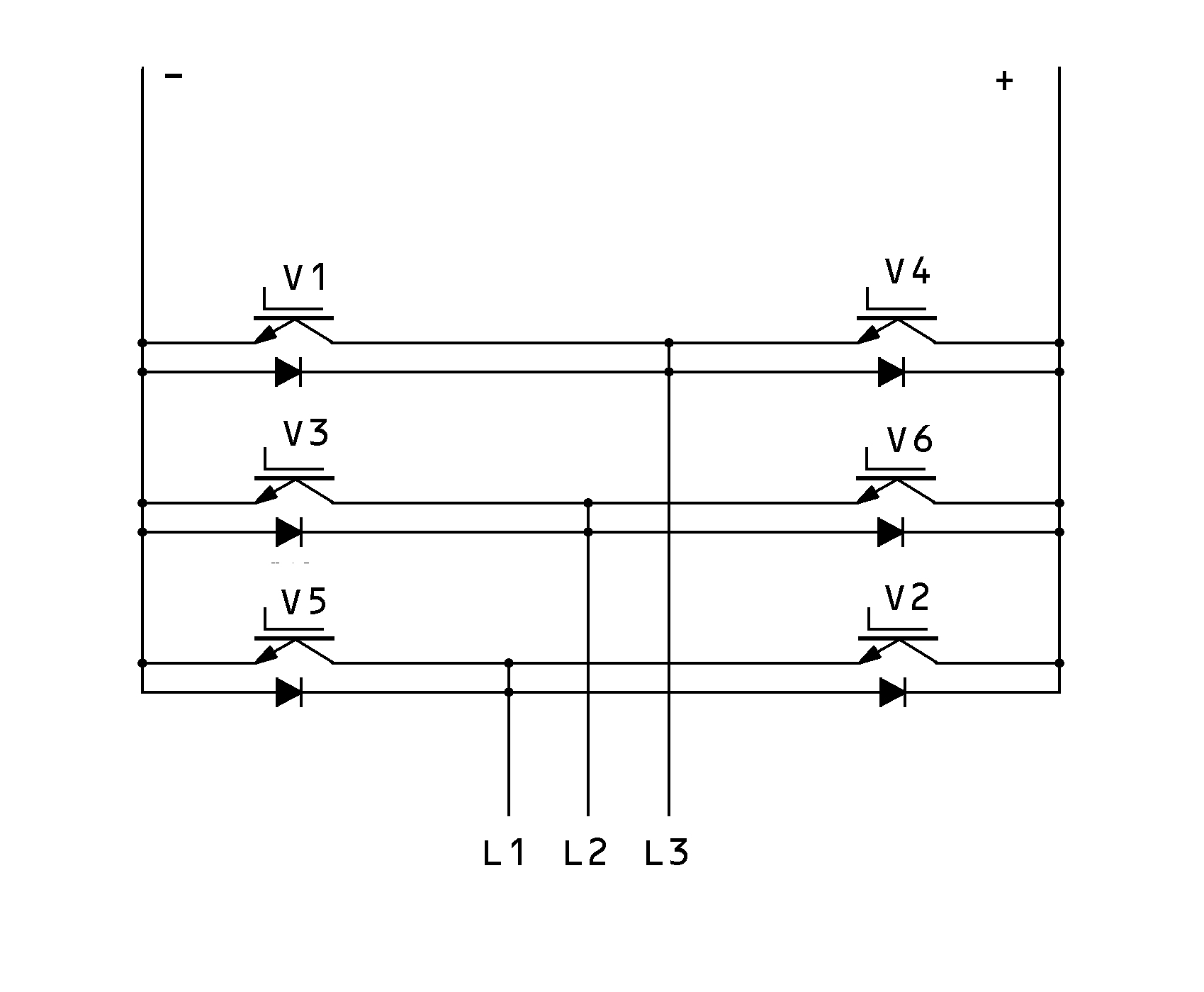
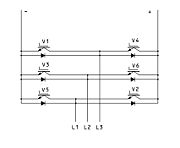 Wechselrichter mit IGBTs und antiparallelen Dioden
Wechselrichter mit IGBTs und antiparallelen DiodenDie sechs Ventile und ihre antiparallelen Dioden in der nebenstehenden Wechselrichterschaltung sind in der Reihenfolge ihres Leitbeginns bei Blockkommutierung nummeriert. Als eingeschaltet gilt ein Ventil, wenn es selbst oder seine Diode leitet.
Es sind die folgenden 8 Schaltzustände möglich.Nummer Eingeschaltet Schaltzustand der Brückenzweige 0 V2,V4,V6 000 1 V1,V2,V3 110 2 V2,V3,V4 010 3 V3,V4,V5 011 4 V4,V5,V6 001 5 V5,V6,V1 101 6 V6,V1,V2 100 7 V1,V3,V5 111
Die Zustände 1 bis 6 bilden an einer symmetrischen Last phasenverschobene Sternspannungen mit den Augenblickswerten +Uo/3, +2Uo/3, +Uo/3, -Uo/3, −2Uo/3, -Uo/3, +Uo/3, … u. s. w. Ihre Grundschwingungen entsprechen einem Drehstromsystem.Die Zustände 0 und 7 schalten die Last spannungsfrei. Sie werden benutzt, um die Ausgangs-spannungen im kurzfristigen Mittel zu verringern. Ein sinusförmiger Strom wird nun durch eine zeitgewichtete Umschaltung zwischen den 8 Zuständen erreicht.
Zur Verminderung von Schaltvorgängen und der zugehörigen Schaltverluste werden die Zustände in ihrer Reihenfolge sinnvoll kombiniert. Nehmen wir an, die Spannung an der Last soll in kleinen Schritten bei verminderter Spannung vom Schaltzustand 1 (V1V2V3) zum Zustand 2 (V2V3V4) verändert, d. h. die angeschlossene Maschine um 60°-elektrisch weitergedreht werden. Dafür bietet sich die Schaltfolge
…V1V2V3, V1V3V5, V2V3V4, V2V4V6, V2V3V4, V1V3V5, V1V2V3…u.s.w. an.
Die einzelnen Leitzeiten ergeben sich aus dem verwendeten Steueralgorithmus und aus der Höhe des geforderten Parameters (Spannung, Strom, Drehmoment).
Mit dieser Reihenfolge der Schaltzustände findet immer nur ein Schaltvorgang bei jeder Kommutierung statt. Übliche PWM-Frequenzen in der Antriebstechnik liegen zwischen 2 kHz und ca. 20 kHz. Mit zunehmender Schaltfrequenz wird der Sinus besser angenähert, die Schaltverluste im Umrichter nehmen zu, die Verluste im Motor durch die bessere sinusförmige Spannung ab.
Optimierung durch Überlagerung von Oberschwingungen
Für eine weitere Optimierung der Sinuskommutierung ist die Überlagung der dritten Harmonischen zur gewünschten Ausgangsfrequenz gebräuchlich.
 Sinus mit dritter Oberschwingung
Sinus mit dritter OberschwingungBlau dargestellt ist ein normaler Sinus f1(x)= 100*sin(x). Der Faktor 100 soll eine Modulation mit PWM von 0 bis 100 % symbolisieren. Grün dargestellt ist die dritte Harmonische f2(x)= 15*sin(3x). Die Frequenz ist genau 3 mal so hoch und die Phasenlage gleich wie die Grundschwingung f1(x). Die Amplitude mit 15 % Pulsweite wurde zunächst willkürlich gewählt. Die schwarz dargestellte Kurve zeigt nun eine Addition beider Sinusfrequenzen mit f1(x)+f2(x). Es entsteht ein resultierendes Signal mit kleinerer Amplitude, welches eher einem Rechtecksignal als einer Sinuskurve ähnlich ist. Außerdem ist der Maximalwert der Amplitude kleiner als die ursprünglich unverzerrte Sinuskurve, weil die 3. Harmonische Frequenz am Maximalwert der Grundschwingung immer ihr umgekehrtes Maximum hat. Werden beide Sinusschwingungen nun in einem Mikrokontroller über eine Tabelle erzeugt, so wird zur Addition keine Rechenleistung benötigt und der Pulsweitenmodulator ist nur zu etwa 85 % seines möglichen maximalen Arbeitsbereichs ausgenutzt. Die verbleibenden 15 % können zur Leistungssteigerung des Frequenzumrichters benutzt werden.
Nun ist es jedoch äußerst problematisch, verschiedene Drehstromverbraucher (u. a. Asynchronmotoren) mit anderen Kurvenformen als mit Sinus zu betreiben. Daher wird im Folgenden noch gezeigt, dass die Kommutierung mit der dritten Harmonischen keinerlei Einfluss auf die Sinuskurvenform am Ausgang des Frequenzumrichters hat.
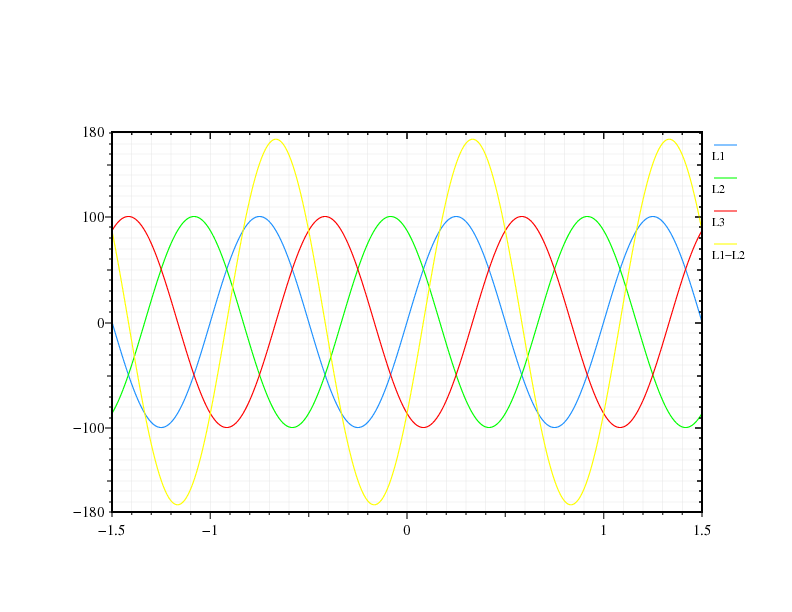
 Differenzspannung zwischen zwei Phasen
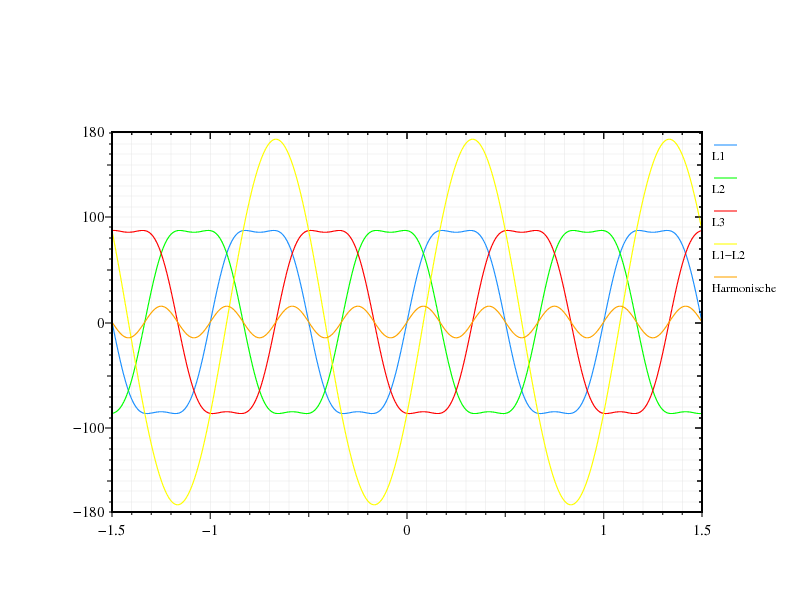
Differenzspannung zwischen zwei Phasen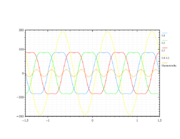 Differenzspannung zwischen zwei Phasen mit dritter Oberschwingung
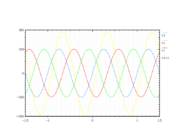
Differenzspannung zwischen zwei Phasen mit dritter Oberschwingung- Blau dargestellt ist L1(x)=100*sin(x)
- Grün dargestellt ist L2(x)=100*sin(x+2/3*pi)
- Rot dargestellt ist L3(x)=100*sin(x+4/3*pi)
Dies ergibt das übliche Bild von 3 Drehstromphasen. Wird nun anstelle einer Sternschaltung ein Verbraucher zwischen den Phasen angeschlossen (Dreiecksschaltung), so ergibt sich als Differenzspannung zwischen 2 beliebigen Phasen jeweils wieder eine sinusförmige Spannung mit erhöhter Amplitude (gelb dargestellt). Ergibt also die Differenz zwischen L1(x)-L2(x) ein sinusförmiges Resultat, so bleibt dies weiterhin gültig, wenn zu L1(x) und L2(x) jeweils eine gleiche Funktion hinzugerechnet wird. Bei einer Verschiebung von 2/3 pi zwischen den Drehstromphasen ist die dritte Oberschwingung (orange dargestellt) zur nächsten Phase jedoch völlig identisch, da sie um genau eine volle Periode verschoben ist. Daher ergeben sich bei der Kommutierung mit der 3. Oberschwingung am Ausgang des Frequenzumrichters wiederum sinusförmige Spannungen und Ströme und zwar unabhängig davon, ob der Verbraucher in Stern oder Dreieck angeschlossen ist.
Die dadurch erreichte Leistungssteigerung des Frequenzumrichters sowie eines daran angeschlossenen Antriebs liegt in der Regel bei etwa 15 %. Dies entspricht etwa dem Amplitudenverlust einer 6-Puls-Drehstrom-Gleichrichterschaltung, welcher im Zwischenkreis etwa 86 % der Spitzenspannung liefert.
EMV-Problematik
Schaltvorgänge
Frequenzumrichter arbeiten mit steilen Schaltflanken, um die Verlustleistung zu minimieren und einen hohen Wirkungsgrad zu erzielen. Bei IGBT-Frequenzumrichtern für 400 V Netzbetrieb (560 V Zwischenkreisspannung) schalten die IGBTs innerhalb von rund 200 ns um. Dies führt zu einer Spannungssteilheit an den Motorleitungen von circa 3 kV/µs. Eine typische kapazitätsarme Motorleitung ist ein gemeinsam abgeschirmtes mehradriges Kabel mit einem Kapazitätsbelag von ca. 200 pF/m. Die Flankensteilheit führt zu Umladeströmen von circa 0,6 A/m. Dies summiert sich bei langen Motorleitungen zu Umladeströmen bis zu 20 A auf, die auch bei Geräten kleiner Leistung fließen und den Wechselrichter erheblich belasten. Bei langen Motorleitungen wachsen die Ströme aufgrund der Wellenausbreitung (5 ns/m) nicht weiter an.
Für die Installation von Frequenzumrichtern ist wichtig, dass diese Ströme einer außerordentlich leistungsstarken Quelle entspringen. Wenn diese Ströme nicht den Weg fließen können, auf dem sie keinen Schaden anrichten, dann suchen die Ströme sich ihren Weg. Wenn die Motorleitung ungeeignet angeschlossen ist, z. B. Anschluss eines möglichen Leitungsschirms als verdrilltes Leitungsende (Pigtail) oder gar keine Auflage der Abschirmung, dann fließen die Umladeströme über Leitungen und Schaltungsteile z. B. Steuerklemmen oder Feldbussysteme und können dort massive Störungen bewirken.
Ein geeigneter Anschluss der Motorleitung (z. B. die großflächige Auflage einer möglichen Leitungsabschirmung) ist essenziell für ein gutes EMV-Verhalten des Frequenzumrichters. Ein günstiges EMV-Verhalten ist durch eine geeignete Filterung im Umrichter zu erreichen, indem der Filter auf kurzem Weg dem Störstrom einen Pfad zum Zwischenkreis bietet, vorzugsweise in der Nähe der Störquellen, den IGBTs. Dabei ist darauf zu achten, dass die Filterelemente nicht zu einer zu starken Verschleifung der Schaltflanken führen, da langsame Schaltzeiten schnell zur Überhitzung in den IGBTs führen können. Dieser Effekt kann auch durch geeignete Kühlung abgefangen werden.
Die Produktnorm für Frequenzumrichter EN61800-3 legt Grenzwerte für Störaussendungen fest.
Netzrückwirkungen
Ein einfacher Frequenzumrichter besteht netzseitig aus einem ungesteuerten Gleichrichter und einem Gleichspannungs-Zwischenkreis mit Elektrolytkondensatoren als Energiespeicher.
Das Netz (Spannungsquelle mit niedriger Impedanz) und der Zwischenkreis (Kondensatoren) werden mit Hilfe der Gleichrichterdioden aufeinandergeschaltet. Dies führt zu impulsartigen Ladeströmen (geringer Stromflusswinkel), die das Netz stark belasten. Durch Vorschalten von Netzdrosseln lassen sich die Netzrückwirkungen mildern. Der Anschluss von Frequenzumrichtern direkt an das Netz führt zu einer starken Belastung von Netz und Zwischenkreis durch einen erhöhten Effektivstrom und reduziert unter Umständen die Lebensdauer des Frequenzumrichters.Inzwischen gibt es Frequenzumrichter, die ohne Zwischenkreiskondensator direkt aus dem Drehstrom-Netz über synchron gesteuerte Leistungshalbleiter zugleich gleich- und umrichten (Matrix-Umrichter). Die resultierende hochfrequente Leistungsentnahme lässt sich wesentlich einfacher (mit kleinen Kondensatoren und Drosseln) filtern, als die impulsförmige Leistungsaufnahme bei ungesteuerten Gleichrichtern. Nachteilig dabei ist allerdings eine leicht reduzierte maximale Ausgangsspannung, da keine Spitzenwert-Gleichrichtung stattfindet.
Eine weitere Variante ist die Vorschaltung einer PFC-Stufe zur Ladung des Zwischenkreiskondensators, die auch rückspeisefähig sein kann. Dies erlaubt einen fast netzrückwirkungsfreien Betrieb ohne Drehmoment-Schwankungen.
Netzrückwirkungen für Frequenzumrichter sind in EN61000-3-2 festgelegt. Interessant ist hierbei, dass es keine Grenzwerte für Frequenzumrichter mit einer Nennleistung von mehr als 1KW gibt, während Umrichter kleinerer Leistung Grenzwerte einhalten müssen.
Geräuschverhalten
Bei der Verwendung einer PWM-Taktfrequenz im Hörbereich entstehen oft störende Geräusche. Diese werden durch mechanische Schwingungen der Motorwicklungen hervorgerufen, die sich mit der Pulsfrequenz magnetisch anziehen und wieder abstoßen. Zur Vermeidung dieses Effektes wird die Pulsfrequenz, wenn möglich, auf >16 kHz erhöht, was allerdings die Verlustleistung des Frequenzumrichters erhöht. Die übliche Pulsfrequenz liegt bei kleinen Umrichtern jenseits des hörbaren Bereiches und ist gewöhnlich einstellbar von 3 bis 16…kHz. Durch moderne Steuerverfahren läßt sich diese auf das Geräusch einwirkende Pulsfrequenz während des Betriebes auch um einen Mittelwert zyklisch verändern (wobbeln). Das subjektive Geräuschverhalten wird dadurch wesentlich verbessert. Das "Wobbeln" der Pulsfrequenz hat bei richtiger Anwendung keinen Einfluss auf das Betriebsverhalten.
Quellen
Literatur
- Klaus Bystron: Leistungselektronik Technische Elektronik Band II. 1. Auflage, Carl Hanser Verlag, München Wien, 1979, ISBN 3-446-12131-5
- Gert Hagmann: Leistungselektronik. 3. Auflage, AULA-Verlag GmbH, Wiebelsheim, 2006, ISBN 978-3-89104-700-2
- Gregor D. Häberle, Heinz O. Häberle: Transformatoren und Elektrische Maschinen in Anlagen der Energietechnik. 2. Auflage, Verlag Europa-Lehrmittel, Haan-Gruiten, 1990, ISBN 3-8085-5002-3
Referenzen
- ↑ http://www.elektromotoren.de/energierueckspeisung.html Energierückspeisung mit Prinzipschaltbild
Siehe auch



Wikimedia Foundation.