- Graham Scan
-
Der Graham Scan (nach Ronald Graham 1972) ist ein effizienter Algorithmus zur Berechnung der konvexen Hülle einer endlichen Menge von Punkten in der Ebene. Bei n Punkten liegt seine asymptotische Laufzeit in
 .
.Inhaltsverzeichnis
Beschreibung
Vorbereitung
 Sortierung einer Punktmenge nach Winkel mit Bezugspunkt P0. Der Winkel zwischen a und c (α) ist größer als der zwischen b und c (β), wenn T(P0,P1,P2) > 0.
Sortierung einer Punktmenge nach Winkel mit Bezugspunkt P0. Der Winkel zwischen a und c (α) ist größer als der zwischen b und c (β), wenn T(P0,P1,P2) > 0.
Sei S = {P} eine endliche Punktmenge. Der Algorithmus beginnt mit einem Punkt der Menge, welcher garantiert ein Eckpunkt der konvexen Hülle ist. Man sucht sich dazu den Punkt mit der kleinsten Ordinate. Sind dies mehrere, so sucht man sich aus diesen Punkten den mit der kleinsten Abszisse aus (lexikographische Suche). Diese Suche kann in O(n) Schritten durchgeführt werden. Nachdem der Startpunkt P0 gefunden wurde, sortiert der Algorithmus die restlichen Punkte P in S nach aufsteigendem Winkel zwischen P0 → P und der x-Achse gegen den Uhrzeigersinn. Haben dabei zwei Punkte den gleichen Winkel (d. h. liegen mit P0 auf einer Linie, sind kollinear mit P0), so wird der Punkt, welcher näher an P0 liegt, verworfen.
Will man bestimmen, ob ein Punkt links von einem anderen liegt, d. h. ob die Linie eines Punkts mit dem Startpunkt einen größeren Winkel zur x-Achse hat als ein anderer Punkt mit dem Startpunkt, sollte man keine trigonometrischen Funktionen verwenden. Die Funktion T(P0,P1,P2) liefert das gewünschte Ergebnis mit weniger Rechenaufwand (fünf Subtraktionen, zwei Multiplikationen) und genauer. Das Ergebnis bleibt hier im rationalen Zahlenbereich, welcher ohne Verlust von Genauigkeit abgebildet werden kann. T bekommt drei Punkte P0, P1 und P2 übergeben. Das Ergebnis wird über den folgenden Ausdruck berechnet.
Berechnung
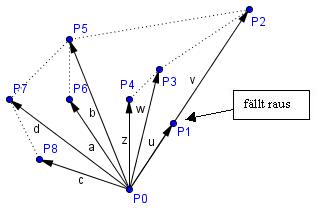
 Nach Winkel sortierte Punktmenge – P0 wird als Startpunkt gewählt, da er den kleinsten Ordinatenwert hat. P1 fällt heraus, da er mit P2 und P0 kollinear ist.
Nach Winkel sortierte Punktmenge – P0 wird als Startpunkt gewählt, da er den kleinsten Ordinatenwert hat. P1 fällt heraus, da er mit P2 und P0 kollinear ist.S sei nun die sortierte Punktmenge. Als nächstes läuft man alle Punkte in S durch und prüft, ob diese Eckpunkte der konvexen Hülle sind. Es wird ein Stapelspeicher (Stack) angelegt, auf welchem sich alle Eckpunkte der konvexen Hülle für alle bereits abgearbeiteten Punkte befinden. Zu Beginn liegen P0 und P1 auf dem Stapel. Im k-ten Schritt wird Pk zur Betrachtung herangezogen und berechnet, wie er die vorherige konvexe Hülle verändert. Aufgrund der Sortierung liegt Pk immer außerhalb der Hülle der vorherigen Punkte Pi mit i < k.
Durch das Hinzufügen des Punktes kann es vorkommen, dass bereits auf dem Stapel liegende Punkte nicht mehr zur neuen konvexen Hülle gehören. Diese Punkte müssen mittels der „pop“ Operation vom Stapel entfernt werden. Ob ein Punkt noch zur konvexen Hülle gehört oder nicht ermittelt man, indem man berechnet, ob Pk links oder rechts des Vektors PT2→PT1 liegt (PT1 = oberstes Element des Stapels, PT2 = Element direkt unter PT1). Liegt Pk links, so bleibt PT1 weiterhin auf dem Stapel und Pk wird mit „push“ auf dem Stapel abgelegt, liegt Pk rechts, so wird PT1 von der neuen konvexen Hülle verschluckt, vom Stapel entfernt und die nächsten beiden oberen Punkte untersucht.
Dieser Test wird solange durchgeführt, bis Pk links des Vektors PT2→PT1 oder nur noch P0 und ein weiterer Punkt auf dem Stapel liegt. In beiden Fällen wird dann Pk auf dem Stapel abgelegt und mit dem nächsten Punkt Pk + 1 weitergerechnet. Die folgende Abbildung zeigt ein Beispiel, in welchem alle Fälle des eben beschriebenen Tests auftreten.
 Beispiel – Graham Scan Algorithmus
Beispiel – Graham Scan AlgorithmusIn nebenstehender Abbildung werden zunächst die Punkte Pt4, Pt3, Pt2 und Pk − 1 auf den Stack gelegt. Zu jedem Zeitpunkt bilden die Punkte auf dem Stack ein konvexes Polygon (gestrichelte Linien). Erst als Pk hinzukommen soll, fallen Pk − 1 und Pt2 wieder raus, da sie zusammen mit Pk nicht konvex sind. Die konvexe Hülle dieser Punktmenge besteht aus P0, Pt4, Pt3 und Pk. P0 liegt dabei auf dem Stack ganz unten und Pk ganz oben. Die Punkte des gesuchten konvexen Polygons können mit „pop“ im Uhrzeigersinn vom Stapel geholt werden.
Anmerkung
Die Anzahl der „push“ und „pop“ Operationen übersteigt die obere Grenze von 2N (N = Anzahl der Punkte in der Eingabemenge) nicht. Die Berechnung ist also O(N). Die Sortierung der Punkte nach Winkel kann mit jedem beliebigen Sortieralgorithmus durchgeführt werden, z. B. dem Quicksort. Dieser hat im Durchschnitt average case die asympt. Laufzeit von O(Nlog N). Das bedeutet, dass die Laufzeit des Algorithmus durch die Sortierung vorgegeben ist, da O(N) + O(Nlog N) = O(Nlog N).
Pseudocode
Unter Nutzung eines Stacks
Funktion GrahamScan Eingabe: Punktemenge S = {P} Ausgabe: konvexe Hülle von S Beginn Funktion Sei S die nach dem Winkel zu P0 sortierte Punktemenge PUSH(P0) PUSH(P1) i := 2 n := Anzahl der Punkte in S Solange i < n, führe aus: Sei Pt1 der oberste Punkt auf dem Stack Sei Pt2 der zweitoberste Punkt auf dem Stack Wenn Si links des Vektors Pt2→Pt1 liegt, dann führe aus: PUSH(Si) i := i + 1 Ansonsten führe aus: POP(Pt1) Ende Bedingung Ende Schleife Ende FunktionOhne Nutzung eines Stacks
Funktion GrahamScan Eingabe: Punktemenge S = {P} Ausgabe: konvexe Hülle von S Beginn Funktion Sei S die nach dem Winkel zu P0 sortierte Punktemenge i := 1 Solange i+1 < |S|, führe aus: Wenn Si rechts des Vektors Si−1→Si+1 liegt, dann führe aus: i := i + 1 Ansonsten führe aus: Entferne das Element Si aus S i := i - 1 Ende Bedingung Ende Schleife Ende FunktionIm Code sei
punkteein Array aus Punkten, aus dem man mitpunkte[i]dasi-te Element erhält und welches schon nach dem Winkel zupunkte[0]sortiert ist. Der Code verändert dieses Array, indem die Elemente gelöscht werden, die nicht zur konvexen Hülle gehören.Weblinks

Wikimedia Foundation.