- Hinterachsgetriebe
-
 Differentialgetriebe
DifferentialgetriebeEin Differentialgetriebe bzw. Differenzialgetriebe (laut neuer Rechtschreibung sowie vom Duden empfohlene Schreibvariante), auch Ausgleichsgetriebe oder kurz Differential bzw. Differenzial genannt, ist ein spezielles Planetengetriebe mit einer Standübersetzung i0 = − 1. Bei einem Kraftfahrzeug, dem häufigsten Einsatzgebiet, ist es ein Getriebe zwischen den angetriebenen Rädern. Da die Räder einer Achse beim Fahren in einer Kurve unterschiedlich lange Wege zurücklegen und sich somit unterschiedlich schnell drehen, dürfen sie nicht starr miteinander verbunden werden.
Beim Differentialgetriebe übertragen beide Räder die gleiche Kraft, die Umfangsgeschwindigkeiten können sich frei einstellen, der Antrieb gibt nur die Summe der beiden Geschwindigkeiten vor.
Anders ausgedrückt: Zwei Räder mit Differential übertragen immer die gleiche Kraft, auch wenn die Geschwindigkeiten nicht gleich sind. Zwei Räder ohne Differential haben immer die gleiche Geschwindigkeit, auch wenn die übertragenen Kräfte nicht gleich sind.
Inhaltsverzeichnis
Aufbau und Wirkungsweise
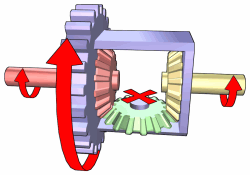
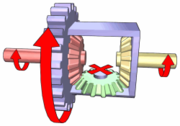 Differentialgetriebe bei gleichen Drehzahlen von Abtriebswellen und Differentialkorb
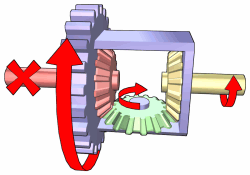
Differentialgetriebe bei gleichen Drehzahlen von Abtriebswellen und Differentialkorb Differentialgetriebe, eine Abtriebswelle blockiert
Differentialgetriebe, eine Abtriebswelle blockiertEin Differentialgetriebe besteht im Prinzip aus einem um die Abtriebsachse drehbaren Differentialkorb, den die Antriebswelle in Rotation versetzt. An den im Differentialkorb liegenden Enden der Abtriebswellen sind Kegelräder angebracht. An der Innenseite des Rotationskorbes sind ein bis vier Kegelräder drehbar befestigt, von denen jedes mit beiden Abtriebskegelrädern verzahnt ist. Bei Kraftfahrzeugen sind die Abtriebswellen mit den angetriebenen Rädern verbunden. Der Differentialkorb wird über ein Kegelradgetriebe, ein Stirnradgetriebe oder ein Hypoidgetriebe angetrieben.
In den nebenstehenden schematischen Abbildungen ist zur Vereinfachung nur ein Ausgleichsrad (grün) dargestellt. Der Differentialkorb wird über ein Stirnrad angetrieben. Bei Geradeausfahrt drehen sich beide Abtriebswellen und der Differentialkorb gleich schnell. Das Differentialgetriebe läuft als Block um und im Inneren stehen die Zahnräder relativ zueinander still. Erst wenn eine durch Kurvenfahrt oder Reibwertsunterschiede der Fahrbahn verursachte Differenzdrehzahl an den Abtriebswellen auftritt, drehen sich die Ausgleichsräder zusätzlich um ihre eigene Achse. Die Drehzahl des Differentialkorbs liegt zwischen den Drehzahlen der Abtriebswellen. An beiden Abtriebswellen greift immer die Hälfte des Antriebsdrehmomentes an. Wird im Extremfall eine Abtriebswelle angehalten, so dreht sich die andere doppelt so schnell wie vorher und damit auch doppelt so schnell wie der Differentialkorb (siehe zweite Abbildung). Dieser Fall tritt bei Kraftfahrzeugen bei losem oder glattem (Schnee) Untergrund auf, sofern sich ein Rad der angetriebenen Achse auf rutschigem und das andere Rad der Achse auf griffigem Untergrund befindet. Weil beide Räder durch das Differentialgetriebe gleich viel Drehmoment übertragen, wird die übertragbare Antriebskraft vom Rad mit der schlechteren Bodenhaftung limitiert. Technisch lässt sich mit Sperrdifferentialen Abhilfe schaffen, die in zahlreichen Bauformen existieren.
Neben der getriebetechnischen Lösung einer Differentialsperre erlaubt auch eine Antriebsschlupfregelung durch geeignetes Bremsen einzelner Räder eine Wirkung hervorzurufen, die dem Sperrdifferential ähnlich ist.
Varianten
Achsdifferential
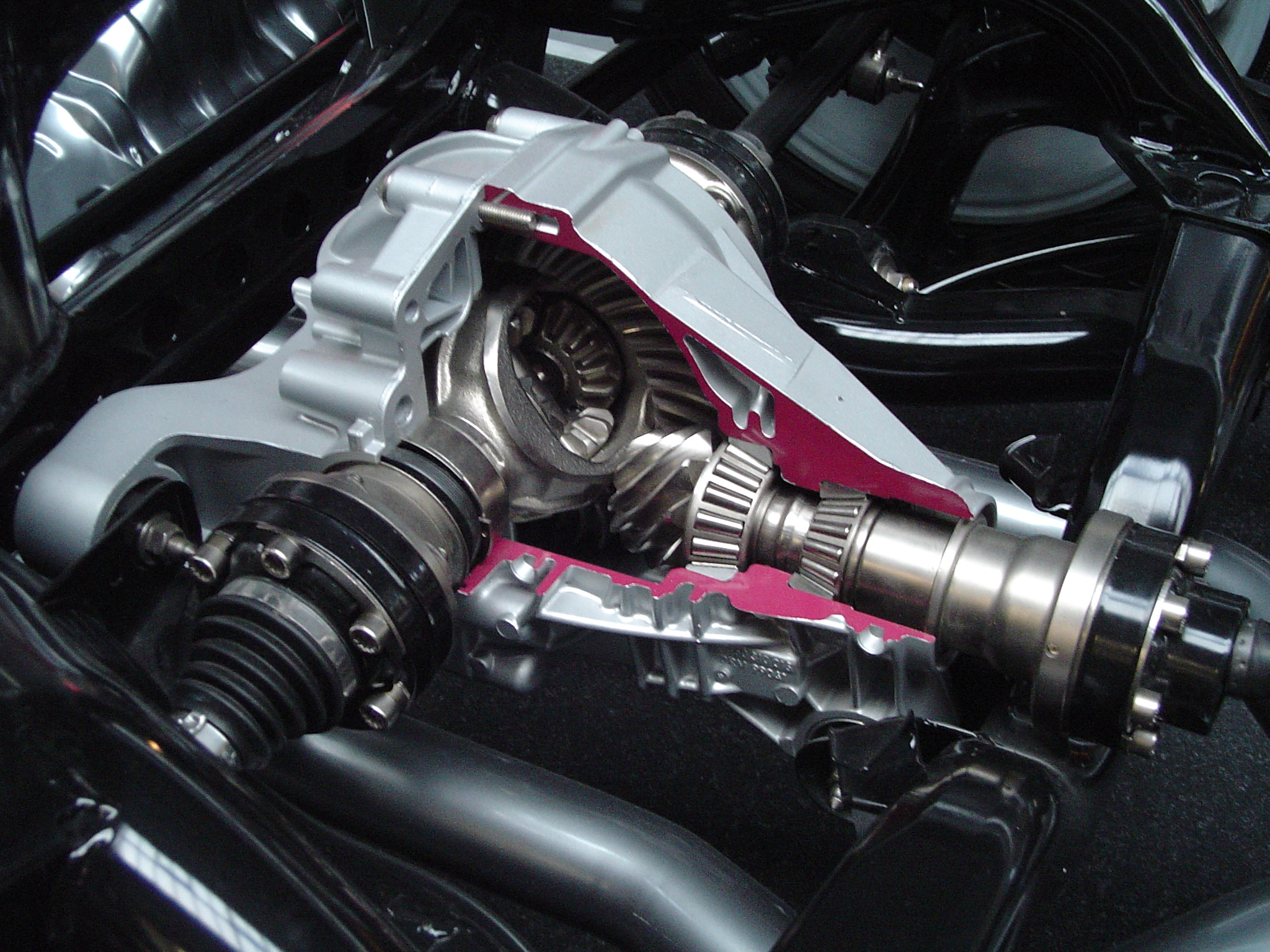
 Differentialgetriebe des Porsche Cayenne
Differentialgetriebe des Porsche CayenneWird das Differentialgetriebe an der Achse eines Kraftfahrzeugs verwendet, dann wird es als Achsdifferential bezeichnet und sorgt für den Ausgleich der Drehzahlen zwischen zwei Rädern. In diesem Falle ist die Standübersetzung stets i0 = − 1, d.h. wenn man den Differentialkorb "festhält" (z.B. durch Einlegen eines Ganges bei stillstehendem Motor), die Räder anhebt und am linken Rad dreht, dann dreht sich das rechte Rad mit der gleichen Drehzahl, aber in entgegengesetzter Richtung.
Zentraldifferential/Längsdifferential
Bei Fahrzeugen, bei denen alle Räder angetrieben werden (Allradantrieb), ist ein Verteilergetriebe erforderlich, welches das Antriebsmoment auf die angetriebenen Achsen verteilt. Da sich bei Kurvenfahrt die Vorder- und Hinterachse verschieden schnell drehen, ist auch hier ein Drehzahlausgleich erforderlich; daher wird auch hier ein Differentialgetriebe eingesetzt, das als Zentral- oder Längsdifferential (wegen der längs liegenden Wellen) bezeichnet wird.
Zentraldifferentiale können wie Achsdifferentiale beschaffen sein, so dass sie ebenfalls eine Standübersetzung von i0 = − 1 haben, man spricht dann von einer Momentenaufteilung von 50:50 zwischen den Achsen. Je näher ein Differential in gewöhnlicher Bauart diesem Verhältnis kommt, um so weniger Reibung entsteht auch unter Differenzdrehzahl und um so geringer sind die Verluste bei der Umverteilung von Drehzahlen.
Es ist aber auch möglich, Zentraldifferentiale mit anderen Standübersetzungen zu bauen, dann kann beispielsweise die Hinterachse mehr Antriebsmoment auf die Straße bringen als die Vorderachse, was beim Beschleunigen und in Steigungen ein großer Vorteil ist. Eine mögliche Verteilung wäre z.B. 35:65, d. h. 35 % des Antriebsmomentes werden an die Vorderachse weitergeleitet und 65 % an die Hinterachse. In diesem Falle ist die Bezeichnung Differential zwar üblich, aber nicht ganz korrekt.
Zentraldifferentiale werden gelegentlich als Stufenplanetensatz (hintereinander geschaltete Planetensätze) gebaut, falls sie aus baulichen Gründen nicht über den Steg angetrieben werden können.
Elektrisches Differential
Bei der Reihenschaltung zweier Kommutatorhauptschlussmotoren fließt durch beide derselbe Strom, beide entwickeln dasselbe Moment. Bei ungleicher Drehzahl liegt an beiden Motoren eine ungleiche Spannung, der Verbindungspunkt liegt spannungsmäßig nicht in der Mitte. Die Speisespannung gibt nur die Summe der Spannungen vor.
Dieses Differential hat auch bei ungleichen Drehzahlen keine Reibung.
Beim Durchdrehen eines Rades wird der entsprechende Motor geshuntet. Dadurch entwickelt er ein kleineres Drehmoment, was wie eine Einradbremse wirkt. Es entsteht aber keine Reibung und kein Verschleiß.
Auch ein völliges Kurzschließen des Motors ist möglich, so dass er kein Drehmoment entwickelt. Dabei entsteht kein selbsterregter Kurzschlussstrom, weil der Remanenzmagnetismus falsch gepolt ist.
Sind die beiden Motoren parallel geschaltet, wirkt das wie ein teilweise gesperrtes Differential. Bei Kurvenfahrt entwickelt der langsamere Motor ein höheres Moment, das aber wegen der weichen Kennlinie nur wenig höher ist. Auch dieses Differential hat keinen Verschleiß und keine Reibung.
Diese Sperre wirkt wie eine Strömungskupplung, die mit steigender Drehzahldifferenz ein steigendes Moment überträgt.
Bei Schienenfahrzeugen mit parallel geschalteten Reihenschlussmotoren kann trotzdem eine Achse durchdrehen (schleudern), während die andere greift. Die Sperrwirkung dieses Differentials ist zu schwach.
Beschreibung als Planetengetriebe
Da die Standübersetzung beim Differential festliegt, kann man die Drehzahlen aus den Grundgleichungen für Planetengetriebe herleiten:
Das bedeutet, dass in jedem Betriebszustand die Summe der Drehzahlen der Räder (Index l, r) gleich der doppelten Drehzahl des Differentialgehäuses (Index An) ist oder dass die Drehzahl des Gehäuses der arithmetische Mittelwert der Raddrehzahlen ist. Dabei sind für die Drehzahlen Vorzeichen zu wählen, wenn also ein Rad rückwärts dreht, ist es hier negativ einzusetzen.
Die Drehmomente verteilen sich im reibungsfreien Differential im Verhältnis 50:50 auf die Räder. Im normalen Differential wirkt immer ein wenig Reibung, so dass es sich wie ein schwach drehmomentfühlendes Sperrdifferential verhält.
Geschichte
Das Differential wurde spätestens ca. 100 v.Chr. in Griechenland erfunden, wo es in einem mechanischen Planetarium verwendet wurde (siehe Mechanismus von Antikythera), geriet jedoch in Vergessenheit und wurde später von Leonardo da Vinci neu erfunden. Das heute übliche Differentialgetriebe für Fahrzeuge wurde im Jahr 1827 von dem Franzosen Onésiphore Pecqueur erfunden.[1]
Siehe auch
- Details zu Sperrdifferentialen und Differentialsperren
- Torsen-Ausgleichsgetriebe
- Transaxle
- Kegeldifferential und Kugeldifferential
- Synchrodrive
- Kompasswagen als historische Anwendung
Weblinks
- www.ArsTechnica.de Sperrdifferentiale, Animationen, Beschreibungen verschiedener Differentialausführungen
- www.howstuffworks.com Animation des offenen Differentials (benötigt Flash-Plug-in)
- Das Ausgleichgetriebe im Einsatz
Einzelnachweise
- ↑ Encyclopedia Britannica online: differential gear

Wikimedia Foundation.