- Innere und äußere Orientierung
-
Bei einer photogrammetrischen Bildaufnahme beschreiben die Daten der Orientierung die Lage des Projektionszentrums der Kamera relativ zur Bildebene (innere Orientierung) sowie die Lage des Projektionszentrums und der Aufnahmerichtung relativ zum Aufnahmeobjekt (äußere Orientierung).
Anhand dieser Daten kann die Aufnahmesituation und damit das photogrammetrische Strahlenbündel der zentralperspektivischen Abbildung geometrisch rekonstruiert werden. Die Bilddaten sind dadurch für messtechnische Zwecke verwendbar.
Inhaltsverzeichnis
Innere Orientierung
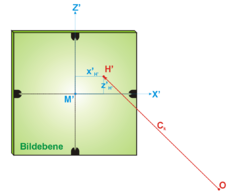
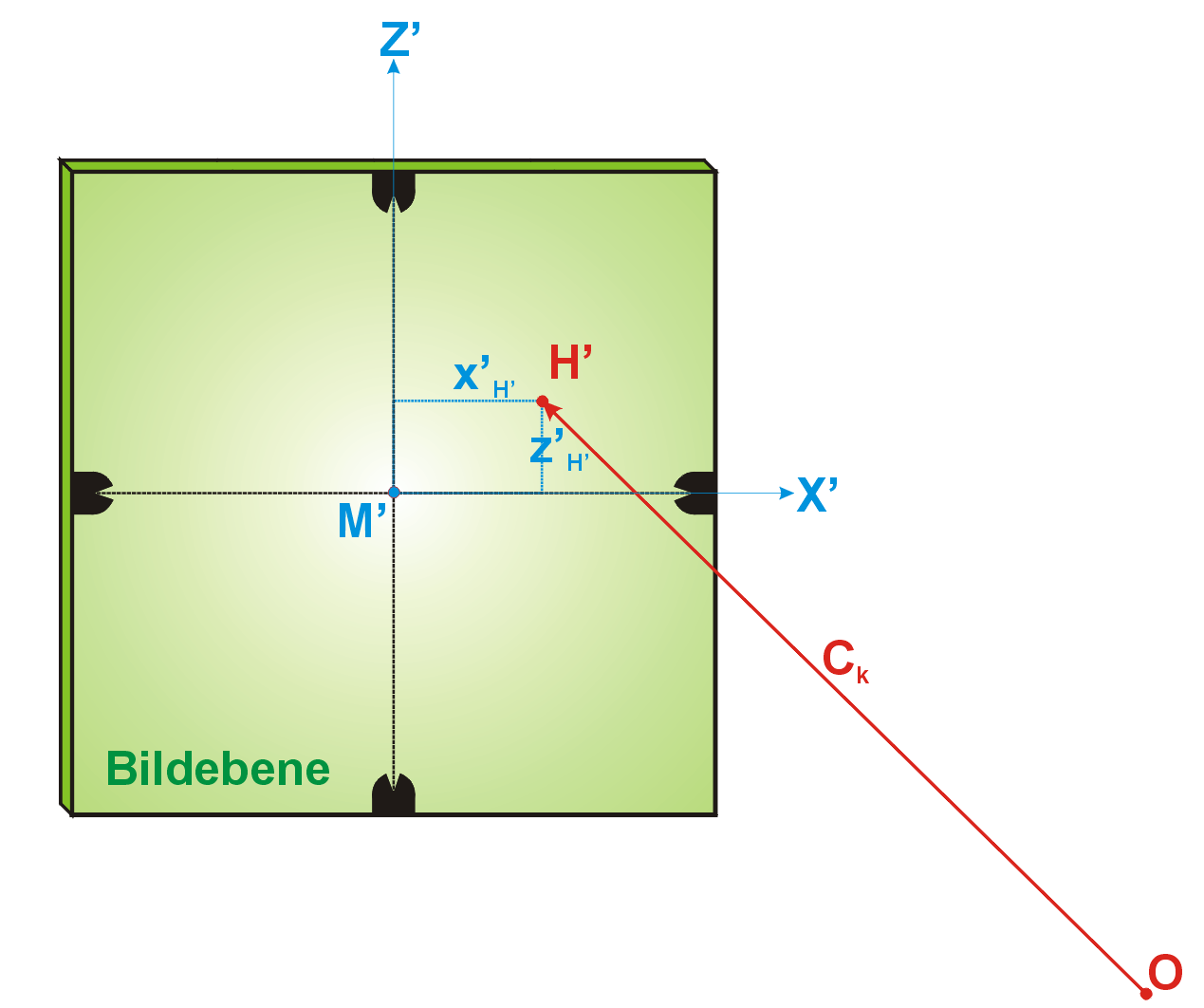
Die innere Orientierung einer Messkamera beschreibt die Position des Projektionszentrums O bezogen auf die Bildebene durch die drei Koordinaten X', Y' und Ck.
X' und Y' (bei terrestrischen Aufnahmen Z' statt Y') sind die Koordinaten des Bildhauptpunktes H'. Der Bildhauptpunkt ist der Durchstoßpunkt der optischen Achse durch die Sensorebene und nicht der Fußpunkt des Lotes durch das Projektionszentrum O! Das Koordinatensystem wird von zwei Geraden durch die Bildmarken oder die Bildecken aufgespannt. Die Geraden schneiden sich im Bildmittelpunkt M'.
Die dritte Größe ist die Kammerkonstante (auch: Kamerakonstante) Ck, der Abstand zwischen dem Projektionszentrum O und seinem Lotfußpunkt H'. Die Kammerkonstante kann auch als Brennweite des verwendeten Objektives verstanden werden. Bei elektronischen Kameras wird die Bildebene durch den Sensorchip anstelle des Filmes repräsentiert.
Die Beträge von x'H' und y'H' sollten möglichst klein sein, der Bildhauptpunkt also mit dem Bildmittelpunkt zusammenfallen.
Gelegentlich werden auch Daten zur Korrektur von Abbildungsfehlern des Objektives mit zu den Parametern der inneren Orientierung gezählt. Dabei wird durch eine geeignete Abbildungsvorschrift z.B. der Art x" = Ax' für jeden Punkt (x',y') eine korrigierte Bildkoordinate (x",y") ermittelt.
Äußere Orientierung
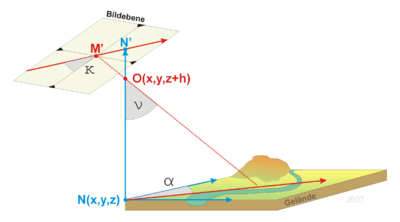
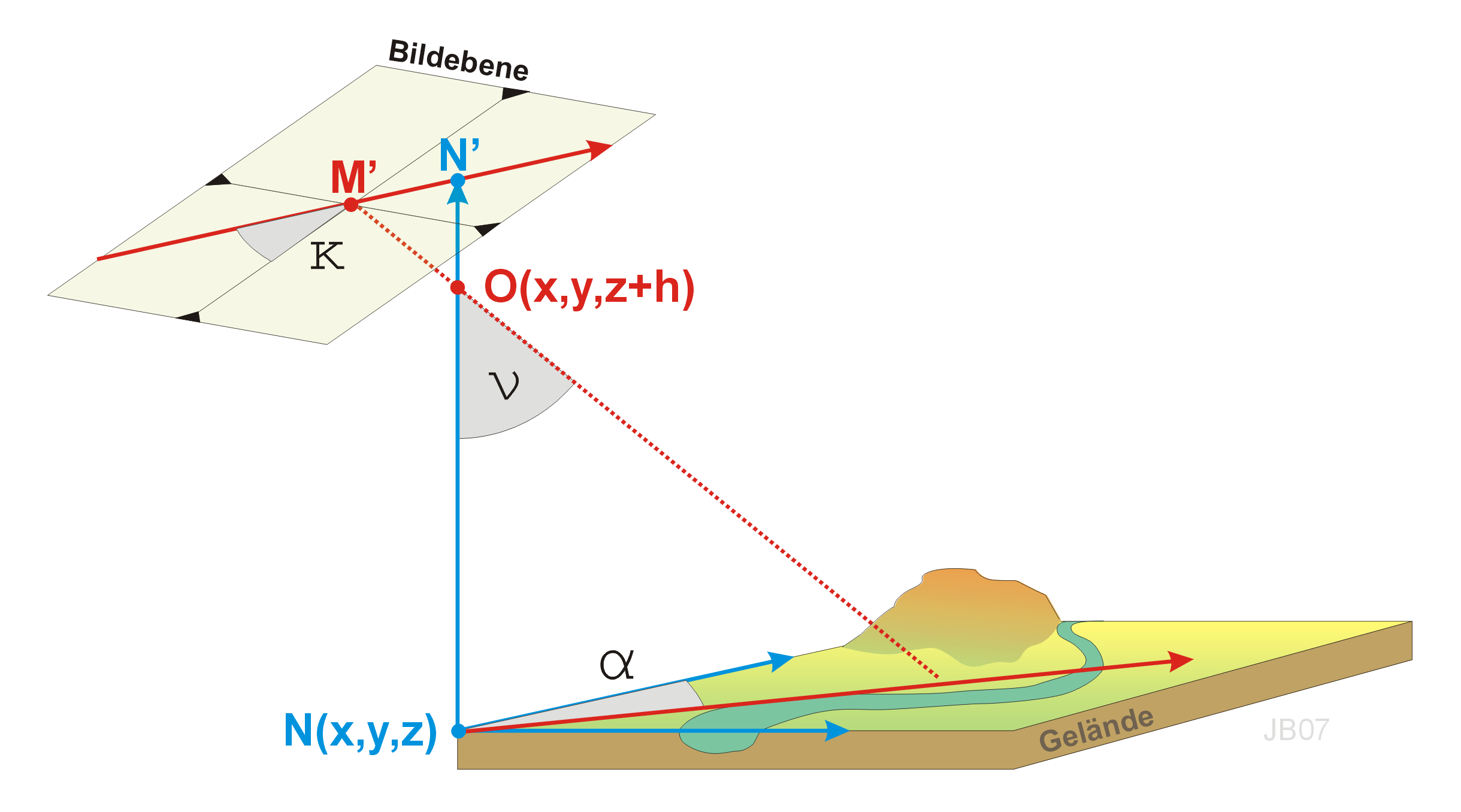
Die äußere Orientierung einer Photogrammetrischen Aufnahme beschreibt die Lage und Position der Kamera während der Aufnahme bezogen auf den Aufnahmegegenstand selbst. Die Position (translatorische Komponente) wird durch die drei Koordinaten (x,y,z) des Projektionszentrums O beschrieben. Bei einer Luftaufnahme wären dies die Koordinaten des Nadirpunktes N im geodätischen System und die Flughöhe h über der Bezugsfläche.
Die Lage (rotatorische Komponente) wird durch drei voneinander unabhängige Drehwinkel bestimmt, z.B. Azimut
 , Neigung
, Neigung  und Kantung
und Kantung  . Bei Senkrechtaufnahmen gibt das Verhältnis
. Bei Senkrechtaufnahmen gibt das Verhältnis  (Kammerkonstante zu Flughöhe) den Abbildungsmaßstab an.
(Kammerkonstante zu Flughöhe) den Abbildungsmaßstab an.Die äußere Orientierung wird im Bildflug vielfach durch Nutzung von GPS und INS (Inertiales Navigationssystem) bestimmt.
Literatur
- Karl Kraus: Photogrammetrie, Band 1, Geometrische Informationen aus Photographien und Laserscanneraufnahmen; 7. Auflage, Walter de Gruyter Verlag, Berlin 2004, ISBN 3-11-017708-0
- Jürgen Bollmann (Hrsg): Lexikon der Kartografie und Geomatik. Spektrum Akademischer Verlag, Heidelberg 2002, ISBN 3-8274-1056-8
Siehe auch
Kategorien:- Photogrammetrie
- Optische Messtechnik
Wikimedia Foundation.