- Absolute Orientierung
-
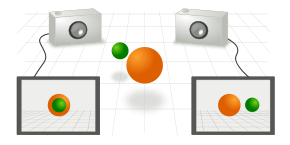 Zwei Kameras nehmen eine Szene auf. Bei der nachträglichen Orientierung wird die Lage der Bilder zueinander wiederhergestellt, wie sie zum Zeitpunkt der Aufnahme war.
Zwei Kameras nehmen eine Szene auf. Bei der nachträglichen Orientierung wird die Lage der Bilder zueinander wiederhergestellt, wie sie zum Zeitpunkt der Aufnahme war.Die relative und die absolute Orientierung sind Teil eines zweistufigen Verfahren aus der Photogrammetrie, das bei der Gewinnung von 3D-Informationen aus Bildern Anwendung findet.
Zur Bestimmung von 3D-Informationen aus Kamerabildern müssen mindestens zwei Bilder eines Objektes oder Szene vorliegen. Diese beiden Bilder haben während der Aufnahme eine bestimmte Lage und Orientierung zueinander. Zur Rekonstruktion des aufgenommenen Objektes muss bei der Auswertung nachträglich die Lage und Orientierung wiederhergestellt werden. Ein mögliche Herangehensweise ist die gemeinsame relative und daran anschließend absolute Orientierung der Bilder.
Relative Orientierung
Bei der relativen Orientierung wird die Lage der zwei Bilder im Raum zueinander wiederhergestellt. Nach der relativen Orientierung schneiden sich die Strahlen homologer Bildpunkte – das sind die beiden Bildpunkte, die ein einzelner Objektpunkt in den beiden Kamerabildern erzeugt – im Raum. Die daraus rekonstruierbaren Koordinaten haben keinen Bezug zu einem übergeordneten Koordinatensystem. Der Maßstab ist frei wählbar, d.h. die Objektgröße ist nicht bestimmt. Es liegt ein so genanntes „photogrammetrisches Modell“ vor, das Koordinatensystem wird als Modellkoordinatensystem bezeichnet.
Absolute Orientierung
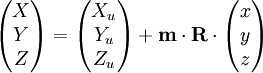
Bei der absoluten Orientierung wird das relativ orientierte Modell in ein übergeordnetes Koordinatensystem transformiert. Der Zusammenhang zwischen einer Koordinate des Modellsystems (x,y und z) und der entsprechenden Objektkoordinate (X,Y und Z) kann wie folgt ausgedrückt werden:
 ist die Maßstabszahl und
ist die Maßstabszahl und  die Matrix der räumlichen Drehung des Modellsystems gegenüber dem Objektkoordinatensystems. Xu,Yu,Zu sind die Objektkoordinaten des Ursprunges des Modellsystems. Es wird somit eine Skalierung, Translation und Rotation durchgeführt. Die Gleichung stellt somit eine räumliche Ähnlichkeitstransformation (auch „Räumliche Helmerttransformation“ genannt) dar.
die Matrix der räumlichen Drehung des Modellsystems gegenüber dem Objektkoordinatensystems. Xu,Yu,Zu sind die Objektkoordinaten des Ursprunges des Modellsystems. Es wird somit eine Skalierung, Translation und Rotation durchgeführt. Die Gleichung stellt somit eine räumliche Ähnlichkeitstransformation (auch „Räumliche Helmerttransformation“ genannt) dar.Siehe auch

Wikimedia Foundation.