- Analoge Prozessorarchitektur
-
Analogcomputer oder Analogrechner sind Rechner, die Berechnungen auf der Basis zu den Problemstellungen gleichartig wirkender mechanischer oder elektrischer Vorgänge bzw. Abbildungen durchführen. Bei Analogrechnern wird die Eigenschaft ausgenutzt, dass es in einem bestimmten Gültigkeitsbereich eine eindeutige Abbildung zwischen dem Verhalten von Original und Modell gibt. Man kann also mit dem Modell das Verhalten des Originals simulieren.
Analogrechner wurden früher häufiger zur Simulation von Regelvorgängen eingesetzt (siehe: Regelungstechnik), sind heute aber fast vollständig von Digitalcomputern verdrängt worden. In einer Übergangszeit gab es auch Hybridrechner, die einen Analog- mit einem digitalen Computer kombinierten.
Inhaltsverzeichnis
Vergleich zu Digitalrechnern
Sie repräsentieren ihre Daten meist nicht als diskrete Werte wie die Digitalrechner, sondern als kontinuierliche – eben analoge – Größen, zum Beispiel in Form von geometrischen Längen, Winkeln, Wasserständen (Wasserintegrator), elektrischen Spannungen oder Strömen, es gibt jedoch auch quasi digitale Analogrechner, sogenannte DDAs (Digital differential analyzers), welche eine einer Problemstellung analoge Nachbildung mit Hilfe digitaler Grundelemente (Summierer, Integrierer und Multiplizierer) ermöglichen.
Der große Vorteil von Analogrechnern gegenüber Digitalrechnern ist ihre Echtzeitfähigkeit sowie ihre prinzipbedingt hohe Ausführungsparallelität. Dies führt zu einer gegenüber algorithmisch programmierten Maschinen deutlich größeren Rechenleistung, die jedoch meist um den Preis einer geringen Rechengenauigkeit, die im besten Fall bei ca. 0,01 Prozent liegt, erkauft wird.
Geschichte der Analogrechner
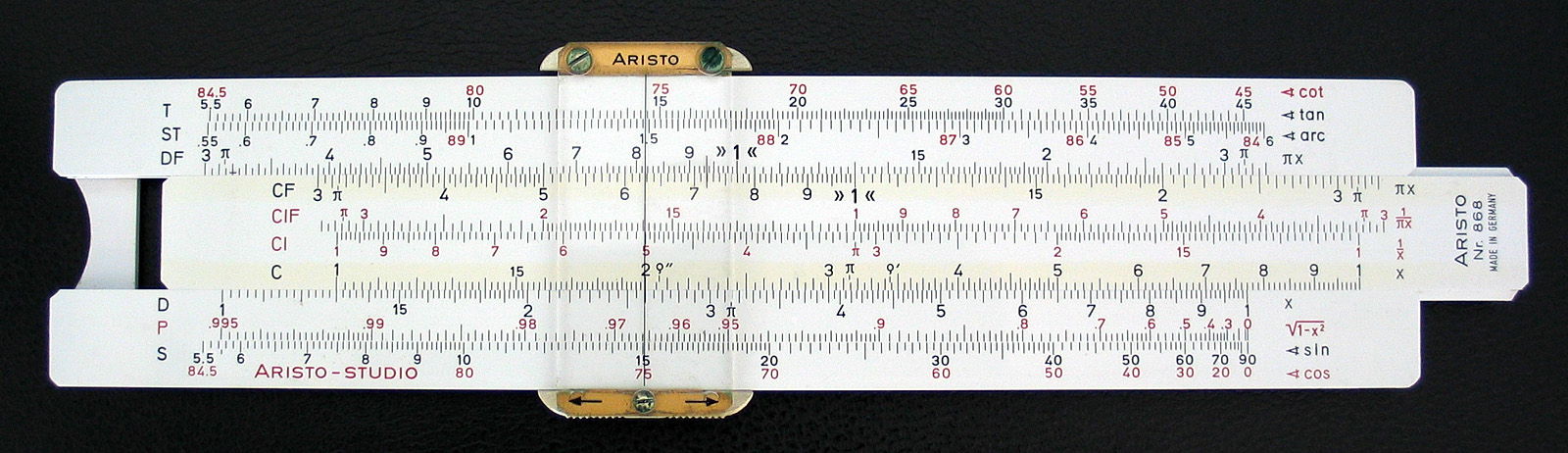
 Rechenschieber
RechenschieberBekannte alte Beispiele für Analogrechner sind die verschiedenen Arten von Rechenschiebern und mechanischen Planimetern, die seit dem 19. Jahrhundert weit verbreitet waren, bis sie in den 1970er und 1980er Jahren durch digitale elektronische Geräte abgelöst wurden.
Der älteste bekannte Analogrechner ist der Mechanismus von Antikythera, der auf ungefähr 150 v. Chr. datiert wird. Mit ihm konnten Mond- und Sonnenfinsternisse sowie die Olympiaden berechnet werden.
Zur Berechnung von Gezeiten wurden mechanische Analogrechner eingesetzt, wie man sie im Deutschen Schiffahrtsmuseum in Bremerhaven oder in Wilhelmshaven [1] sehen kann.
1919 war Vannevar Bush als Wissenschaftler am MIT beschäftigt, ab 1923 als Professor für Elektrotechnik. Dort entwickelte er zwischen 1923 und 1927 einen Analogrechner zum Lösen von Differentialgleichungen, den Product Integraph.
Der Differential Analyzer war ein elektromechanischer Analogrechner, der mehrere Differentialgleichungen gleichzeitig handhaben konnte. Die Ausgabe erfolgte mittels automatisch gedruckter Schaubilder. Er wurde in den Jahren 1928 bis 1932 am Massachusetts Institute of Technology (MIT) unter der Leitung von Vannevar Bush und H. L. Hazen entwickelt.
Der Wasserintegrator ist ein Analogrechner. Er wurde 1936 in der Sowjetunion gebaut. Mittels eines komplexen Netzwerkes aus Röhren und Wasserbehältern konnten Berechnungen durchgeführt werden.
Im Zweiten Weltkrieg arbeitete Sergei Alexejewitsch Lebedew an automatischen Regelungen komplexer Systeme. Seine Gruppe entwickelte eine Zieleinrichtung für Panzer und ein Navigationssystem für Raketen. Um diese Arbeiten auszuführen entwickelte er bis 1945 einen Analogrechner zum Lösen von Differentialgleichungen.
Helmut Hölzer (1912–1996) war ein deutscher Ingenieur (TH-Darmstadt, heute TU-Darmstadt), der einen elektrischen Analogrechner entwickelte.[2][3]
Analogrechner wurden insbesondere in den Jahren zwischen 1950 und 1980 zur Lösung von gewöhnlichen Differentialgleichungen entwickelt.
Elektronische Analogrechner
 Polnischer elektronischer Analogrechner AKAT-1
Polnischer elektronischer Analogrechner AKAT-1 Ein elektronischer Newmark-Analogcomputer
Ein elektronischer Newmark-AnalogcomputerElektronisches Analogrechner waren technisch nutzbar zum Beispiel zur Simulation von Flugbahnen von Artilleriegeschossen und Bomben, zur Untersuchung von Fragestellungen in der Reaktorphysik, in der Luft- und Raumfahrttechnik, jedoch auch in der Mathematik, der Simulation von Prozessen, bei der Optimierung, etc.
Hauptelement eines herkömmlichen elektronischen Analogrechners ist der Operationsverstärker, der als Grundlage für Summierer, Integrierer und auch Multiplizierer zum Einsatz kommt. Neben diesen Grundelementen verfügen elektronische Analogrechner als Eingabeeinheit über Koeffizientenpotentiometer, die als Spannungsteiler eingesetzt werden, um variable Koeffizienten abzubilden. Darüber hinaus wurden im Lauf der Jahre eine Vielzahl spezialisierter Zusatzgeräte entwickelt. Zu diesen zählen Resolver zur Umwandlung zwischen kartesischen Koordinaten und Polarkoordinaten, Laufzeitverzögerungsglieder zur Simulation von Signallaufzeiten, Rauschgeneratoren für die Erzeugung stochastischer Signale, und viele mehr.
Zur Darstellung der Ergebnisse einer Rechnung werden meist Oszilloskope beziehungsweise Schreiber verwendet, wobei hier die Möglichkeit eines Analogrechners, Rechnungen durch Zeitskalierung zwanglos schneller beziehungsweise langsamer als in der Realität ablaufen zu lassen, zum Tragen kommt. Beispielsweise ist es möglich, die Simulation eines einfachen Ökosystems mit extrem gesteigerter Geschwindigkeit ablaufen zu lassen, während andere Vorgänge, die in der Realität zu schnell für eine direkte Untersuchung ablaufen (Reaktionskinetische Fragen in der Chemie, etc.), entsprechend verlangsamt untersucht werden können.
Neben der eingeschränkten Rechengenauigkeit besteht bei elektronischen Analogrechnern das zusätzliche Problem eines auf eine sogenannte Maschineneinheit eingeschränkten Wertebereiches. Bei Röhrenrechnern betrug die Maschineneinheit meist 100 V, während, von wenigen Ausnahmen abgesehen, transistorisierte Maschinen meist mit 10 V als Maschineneinheit arbeiteten. Überschreitungen dieses Wertebereiches im Verlauf einer Rechnung führten zu einer Übersteuerung und lösten meist einen Halt des Rechners aus. Schwierig hierbei ist, dass alle zu behandelnden Differentialgleichungen durch geeignete Skalierung dergestalt modifiziert werden müssen, dass es bei ihrer Lösung zum einen zu keiner Übersteuerung, zum anderen jedoch zu einer stets möglichst guten Ausnutzung des Wertebereiches von +/- 1 ME kommt, um Rechenfehler gering zu halten. Mit vertretbarem Aufwand war in den 1970er Jahren mit transistorbasierten Maschinen eine Genauigkeit von 4 Dezimalstellen erreichbar.
In dieser Hinsicht kann ein elektronischer Analogrechner mit gewissem Recht mit einem digitalen Festkommasystem verglichen werden, das über ähnliche Einschränkungen hinsichtlich des Wertebereiches verfügt.
Die meisten kommerziell verfügbaren Analogrechner besaßen ein zentrales Buchsenfeld (Patchfeld), auf dem mit Hilfe von Steckverbindungen (bei Präzisionsrechnern wurden hier abgeschirmte Leitungen verwendet) die jeweiligen Rechenschaltungen zur Lösung einer Fragestellung aufgebaut wurden. Ein Wechsel von einer Schaltung zur nächsten erforderte lediglich das Austauschen des Buchsenfeldes sowie ein erneutes Einstellen der Koeffizientenpotentiometer, so dass ein vergleichsweise schneller Wechsel zwischen Problemen möglich war.
Gerade in der Frühzeit der Entwicklung elektronischer Analogrechner gab es auch Ansätze, Probleme durch das Bilden direkter Analogien mit Hilfe hauptsächlich passiver Elemente wie Widerständen, Kondensatoren und Spulen anzugehen.
Beispiel: Zellulärer Automat
Zum Beispiel wurde ein solcher analoger Zellulärer Automat zur Simulation von Grundwasserströmungen auf die folgende Weise aufgebaut:
Man stellte ein zweidimensionales Feld aus Kondensatoren zusammen, deren Kapazität dem Wasserspeichervermögen eines kleinen Teilgebietes des Bodens entsprach, und verband diese dann mit Widerständen mit ihren direkten Nachbarn, wobei die Leitfähigkeit der Widerstände der Wasserdurchlässigkeit des entsprechenden Teilgebietes des Bodens entsprach. Dazu kamen nun Quellgebiete als über Widerstände geregelte Spannungseinleitungen, und Brunnen als über Widerstände geregelte Spannungsableitungen. Die an den Knotenpunkten dieses Netzes gemessene Spannung entsprach dann dem zu erwartenden Grundwasserstand, und die Ströme in den Widerständen entsprachen der zu erwartenden Grundwasserströmung.
Gegen Ende der 1960er Jahre wurden auch vermehrt genannte Hybridrechner entwickelt und eingesetzt, die über digitale und analoge Rechenwerke verfügten, um so die Vorteile beider Welten, der analogen sowie der digitalen zu vereinigen.
Sonstiges
Modulare Synthesizer eignen sich, je nach Qualität, für den Aufbau von Analogrechnern.
Literatur
- Sigvard Strandh: Die Maschine – Geschichte, Elemente, Funktion. ISBN 3-451-18873-2, S. 191.
- H. Adler und G. Neidhold: Elektronische Analog- und Hybridrechner. Nr. 206-435/197/74, VEB Deutscher Verlag der Wissenschaften, Berlin (Ost) 1974.
Weblinks
- Das Analogrechnermuseum Sammlung elektronischer Analogrechner mit umfangreicher Dokumentation zum Download sowie vielen praktischen Beispielen.
- Darstellung eines Joukowski-Profils mit Strömungslinien auf einem Analogrechner
- Historische Analog- und Hybridrechner mit Detailbildern ihrer Steckbretter
- Neueres Forschungsprojekt FACETS (Fast Analog Computing with Emergent Transient States)
Einzelnachweise
- ↑ Erster deutscher Gezeitenrechner von 1914 in Wilhelmshaven
- ↑ http://www.cdvandt.org/Hoelzer%20V4.pdf Helmut Hoelzer’s Fully Electronic Analog Computer used in the German V2 (A4) rockets
- ↑ siehe auch http://en.wikipedia.org/wiki/Helmut_H%C3%B6lzer



Wikimedia Foundation.