- Leitkoeffizient
-
In der Mathematik ist ein Polynom (von griech. πολύ / polý und lat. nomen = „mehrnamig“) eine Summe von Vielfachen von Potenzen mit natürlichzahligen Exponenten einer Variablen, die in den meisten Fällen mit x bezeichnet wird.
In der elementaren Algebra identifiziert man diese formale Summe mit einer Funktion in x (einer Polynomfunktion), in der abstrakten Algebra unterscheidet man streng zwischen diesem Begriff und dem eines Polynoms als Element eines Polynomrings. In der Schulmathematik wird eine Polynomfunktion auch als ganzrationale Funktion bezeichnet (siehe auch rationale Funktion).
Dieser Artikel erklärt außerdem die mathematischen Begriffe: Grad eines Polynoms, Leitkoeffizient, Normieren eines Polynoms, Polynomglied, Absolutglied, Binom; sowie Nullstellenschranke, Cauchy-Regel, Newton-Regel, gerade und ungerade Potenz.
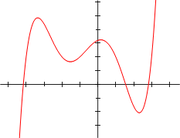 Graph einer Polynomfunktion 5. Grades
Graph einer Polynomfunktion 5. GradesInhaltsverzeichnis
Polynome in der elementaren Algebra
Definition
In der elementaren Algebra ist eine Polynomfunktion oder kurz Polynom eine Funktion P(x) der Form
 ,
,
wobei als Definitionsbereich für die Variable x jede beliebige R-Algebra in Frage kommt, wenn R der Wertebereich der Koeffizienten ist (siehe unten). Häufig ist dieser jedoch die Menge der ganzen, der reellen oder der komplexen Zahlen.
- Die ai stammen aus einem Ring R, z. B. einem Körper oder einem Restklassenring, und werden Koeffizienten genannt. Wenn R die ganzen, die reellen bzw. die komplexen Zahlen umfasst, spricht man auch von ganzen, reellen bzw. komplexen Polynomen.
- Alle Exponenten sind natürliche Zahlen.
- Als Grad des Polynoms wird der höchste Exponent n bezeichnet, für den der Koeffizient an des Monoms anxn nicht null ist. Dieser Koeffizient heißt Leitkoeffizient. (Die übliche Schreibweise
 für den Grad des Polynoms f ist vom englischen Begriff degree abgeleitet. In der deutschsprachigen Literatur findet sich häufig auch die aus dem Deutschen kommende Schreibweise
für den Grad des Polynoms f ist vom englischen Begriff degree abgeleitet. In der deutschsprachigen Literatur findet sich häufig auch die aus dem Deutschen kommende Schreibweise  oder
oder  .)
.) - Für das Nullpolynom, bei dem alle ai Null sind, wird der Grad als
 definiert.
definiert. - Ist der Leitkoeffizient 1, dann heißt das Polynom normiert.
- Ist der Inhalt 1, dann heißt das Polynom primitiv.
Der Koeffizient a0 heißt Absolutglied. a1x wird als lineares Glied bezeichnet, a2x2 als quadratisches Glied und a3x3 als kubisches.
Einfaches Beispiel
Das Polynom
- P(x) = 2x3 + x2 + 3,5x − 5
ist eine Polynomfunktion dritten Grades (höchster Exponent ist 3), der Leitkoeffizient ist 2, die anderen Koeffizienten sind 1; 3,5 und -5.
Bezeichnung spezieller Polynome
Polynome des Grades
- 0 werden konstante Funktionen genannt (z. B. P(x) = − 1).
- 1 werden lineare Funktionen genannt (z. B. P(x) = 3x + 5).
- 2 werden quadratische Funktionen genannt (z. B. P(x) = − 3x2 − 4x + 1).
- 3 werden kubische Funktionen genannt (z. B. P(x) = 4x3 − 2x2 + 7x + 2).
- 4 werden quartische Funktionen genannt (z. B. P(x) = 6x4 − x3 + 4x + 2).
Eigenschaften
- Polynome sind von besonderer Bedeutung, weil sie eine einfache Funktionenfamilie bilden. Insbesondere sind sie leicht zu differenzieren und integrieren. Die Ableitung eines Polynoms
-
- ist das Polynom
- Es gibt viele Möglichkeiten, kompliziertere Funktionen durch Polynome anzunähern (siehe z. B. Taylor-Formel, Polynominterpolation, Approximationssatz von Weierstraß).
- Polynome wachsen als Linearkombinationen von Potenzen (für hinreichend große Werte der Variablen x) langsamer als jede exponentielle Funktion, deren Basis größer als 1 ist, unabhängig von den Koeffizienten.
- Reelle Polynome ungeraden Grades haben ganz
 als Wertemenge, d. h. sie sind surjektiv.
als Wertemenge, d. h. sie sind surjektiv.
- (Wenn man die x-Achse als Zeitachse interpretiert, ergibt sich anschaulich folgendes Bild für diese Polynome: Entweder kommen sie von , schwanken evtl. ein bisschen (eine oder mehrere Nullstellen) und gehen dann Richtung
 , oder sie kommen umgekehrt von , schwanken evtl. etwas und gehen dann Richtung .)
, oder sie kommen umgekehrt von , schwanken evtl. etwas und gehen dann Richtung .)
- Reelle Polynome geraden Grades haben einen Wertebereich von
 bei positivem Leitkoeffizienten an
bei positivem Leitkoeffizienten an![\left]-\infty,\,y_\mathrm{max}\right]](/pictures/dewiki/49/14946d9b82df373c7617e258818ee23b.png) bei negativem an
bei negativem an
- (Wenn man die x-Achse als Zeitachse interpretiert, ergibt sich anschaulich folgendes Bild für diese Polynome: Entweder kommen sie von , schwanken ein bisschen (lokale Maxima, evtl. Nullstellen) und gehen dann wieder Richtung , oder sie kommen von , schwanken ein bisschen (lokale Minima) und gehen dann wieder Richtung .)
- Für den Grad von Polynomen f,g gelten die Gradabschätzungen
-
- und für reelle Polynome oder allgemein für Polynome über einem Integritätsbereich
- Für allgemeinere Ringe gilt auch in der letzten Beziehung lediglich
 .
.
- Mit dem Horner-Schema kann die Auswertung f(a) eines Polynoms an einer bestimmten Stelle a effizient vorgenommen werden.
Nullstellen des Polynoms
Allgemeine Eigenschaften
Als Nullstellen oder Wurzeln eines Polynoms werden jene Werte von x bezeichnet, für die der Funktionswert P(x) null ist. Sie sind also die Lösungen der Gleichung P(x) = 0. Ein Polynom über einem Körper (oder allgemeiner einem Integritätsbereich) hat stets höchstens so viele Nullstellen, wie sein Grad angibt.
- Der Fundamentalsatz der Algebra besagt, dass ein komplexes Polynom vom Grad n größer oder gleich 1 mindestens eine komplexe Nullstelle hat (reiner Existenssatz). Dann hat es genau n Nullstellen (Polynomdivision), wenn die Nullstellen entsprechend ihrer Vielfachheit gezählt werden, beispielsweise hat das Polynom (x − 2)2 eine doppelte Nullstelle bei x = 2. Jedes Polynom positiven Grades lässt sich daher in ein Produkt von Linearfaktoren zerlegen.
- Jede rationale Nullstelle eines normierten Polynoms (höchster Koeffizient ist 1) mit ganzzahligen Koeffizienten ist ganzzahlig und Teiler des Absolutgliedes.
- Die Nullstellen von Polynomen ersten, zweiten, dritten und vierten Grades lassen sich mit Formeln exakt berechnen (z. B. pq-Formel für quadratische Gleichungen), dagegen lassen sich Polynome höheren Grades nur in Spezialfällen mit Hilfe von Wurzelzeichen exakt faktorisieren.
- Polynome ungeraden Grades mit reellen Koeffizienten haben immer mindestens eine reelle Nullstelle.
Nullstellenschranken
Die Lage aller Nullstellen eines Polynoms vom Grad n lässt sich durch Nullstellenschranken, in deren Berechnung nur die Koeffizienten und der Grad des Polynoms eingehen, abschätzen.
Reelle Nullstellenschranken
Ein wichtiger Spezialfall sind reelle Nullstellenschranken für reelle Polynome: Eine Zahl
 heißt reelle Nullstellenschranke des Polynoms
heißt reelle Nullstellenschranke des Polynoms ![f\in\R[X]](/pictures/dewiki/53/5cb4b687c86294d1beb3c0aacf0dfbf7.png) , wenn alle reellen Nullstellen von f im Intervall [ − B,B] liegen; sie heißt obere reelle Nullstellenschranke von f, wenn alle reellen Nullstellen von f kleiner oder gleich B sind. Analog sind untere Nullstellenschranken erklärt. Für viele reelle Nullstellenschranken spielt die Teilindexmenge
, wenn alle reellen Nullstellen von f im Intervall [ − B,B] liegen; sie heißt obere reelle Nullstellenschranke von f, wenn alle reellen Nullstellen von f kleiner oder gleich B sind. Analog sind untere Nullstellenschranken erklärt. Für viele reelle Nullstellenschranken spielt die Teilindexmenge  der echt negativen Koeffizienten von f eine besondere Rolle. Beispiele reeller Nullstellenschranken für normierte Polynome
der echt negativen Koeffizienten von f eine besondere Rolle. Beispiele reeller Nullstellenschranken für normierte Polynome  sind:
sind: ist eine obere reelle Nullstellenschranke (Cauchy-Regel),
ist eine obere reelle Nullstellenschranke (Cauchy-Regel), ist eine obere reelle Nullstellenschranke (Newton-Regel);
ist eine obere reelle Nullstellenschranke (Newton-Regel);- Jedes , das die Ungleichung
 erfüllt, ist eine reelle Nullstellenschranke (das so definierte B ist sogar eine Schranke für die komplexen Nullstellen komplexer Polynome). Spezialfälle hiervon sind (s. auch Satz von Gerschgorin)
erfüllt, ist eine reelle Nullstellenschranke (das so definierte B ist sogar eine Schranke für die komplexen Nullstellen komplexer Polynome). Spezialfälle hiervon sind (s. auch Satz von Gerschgorin)
 und
und .
.
- Jedes , das die Ungleichung
 erfüllt, ist eine obere reelle Nullstellenschranke. Spezialfälle hiervon sind
erfüllt, ist eine obere reelle Nullstellenschranke. Spezialfälle hiervon sind
 ,
, .
.
Komplexe Nullstellenschranken
Für komplexe Polynome
![f\in\Bbb C[X]](/pictures/dewiki/49/1c6a2a1fa6637cdb5a91c0162d564662.png) sind als Pendant zu den reellen Nullstellenschranken Kreise um den Nullpunkt der komplexen Zahlenebene üblich, deren Radius so groß zu wählen ist, dass alle (bzw. je nach Anwendung auch nur „einige“) komplexen Nullstellen des Polynoms auf der Kreisscheibe mit diesem Radius liegen. Eine Zahl heißt komplexe Nullstellenschranke des Polynoms , wenn alle Nullstellen von f auf der Kreissscheibe um den Nullpunkt mit Radius B liegen (oder anders formuliert: wenn der Betrag jeder Nullstelle kleiner oder gleich B ist). Ein Ergebnis für komplexe Polynome ist:
sind als Pendant zu den reellen Nullstellenschranken Kreise um den Nullpunkt der komplexen Zahlenebene üblich, deren Radius so groß zu wählen ist, dass alle (bzw. je nach Anwendung auch nur „einige“) komplexen Nullstellen des Polynoms auf der Kreisscheibe mit diesem Radius liegen. Eine Zahl heißt komplexe Nullstellenschranke des Polynoms , wenn alle Nullstellen von f auf der Kreissscheibe um den Nullpunkt mit Radius B liegen (oder anders formuliert: wenn der Betrag jeder Nullstelle kleiner oder gleich B ist). Ein Ergebnis für komplexe Polynome ist:- Jedes , das die Ungleichung
 erfüllt, definiert einen Kreis in der komplexen Ebene mit Radius B um den Nullpunkt, der genau k komplexe Nullstellen enthält (Folgerung aus dem Satz von Rouché). Diese Ungleichung ist für k=0,n immer lösbar, aber nicht notwendig für jeden Index k=1,...,n−1.
erfüllt, definiert einen Kreis in der komplexen Ebene mit Radius B um den Nullpunkt, der genau k komplexe Nullstellen enthält (Folgerung aus dem Satz von Rouché). Diese Ungleichung ist für k=0,n immer lösbar, aber nicht notwendig für jeden Index k=1,...,n−1. - Im Fall k=n ergibt sich die schon für reelle Polynome angegebene Schranke für den Betrag aller Nullstellen. Alle dort angegebenen direkten Berechnungen von B gelten weiter.
- Im Fall k=0 ergibt sich ein Kreis, der keine Nullstellen enthält. 1/B ist dann eine Schranke für alle Nullstellen des „reziproken“ Polynoms xnf(1 / x) / a0.
Lösungsformeln
Prinzipiell gibt es mehrere Möglichkeiten, die Nullstellen eines Polynoms zu bestimmen. Allgemeine Iterationsverfahren, wie das Newton-Verfahren und die Regula Falsi oder auf Polynome spezialisierte Iterationsverfahren, wie das Bairstow-Verfahren oder das Weierstraß-(Durand-Kerner)-Verfahren sind einerseits auf jedes Polynom anwendbar, verlieren allerdings bei mehrfachen oder dicht beieinanderliegenden Nullstellen an Genauigkeit und Konvergenzgeschwindigkeit.
Für quadratische Gleichungen, kubische Gleichungen und quartische Gleichungen gibt es allgemeine Lösungsformeln, für Polynome höheren Grades gibt es Lösungsformeln, sofern diese spezielle Formen haben:
- Reziproke Polynome haben die Form
-
- d. h. für den i-ten Koeffizienten gilt
 ; anders gesagt: die Koeffizienten sind symmetrisch. Für diese Polynome und solche, die eine leichte Modifikation dieser Symmetriebedingung erfüllen, kann die Nullstellenbestimmung mit Hilfe der Substitution z = x + 1 / x (bzw. z = x − 1 / x) auf eine Polynomgleichung reduziert werden, deren Grad halb so groß ist. Für Details siehe reziprokes Polynom.
; anders gesagt: die Koeffizienten sind symmetrisch. Für diese Polynome und solche, die eine leichte Modifikation dieser Symmetriebedingung erfüllen, kann die Nullstellenbestimmung mit Hilfe der Substitution z = x + 1 / x (bzw. z = x − 1 / x) auf eine Polynomgleichung reduziert werden, deren Grad halb so groß ist. Für Details siehe reziprokes Polynom.
- Binome haben die Form

- Setzen wir c als reell voraus, so sind die n Lösungen Vielfache der komplexen n-ten Einheitswurzeln:
![x_k = \sqrt[n]{\vert c \vert } \cdot \exp\left({2k\pi\mathrm{i}\over n}\right), \quad c < 0](/pictures/dewiki/97/af44f79aa582b0a91d033df3f46cfbda.png)
![x_k = \sqrt[n]{c} \cdot \exp\left({(2k+1)\pi\mathrm{i}\over n}\right), \quad c \geq 0](/pictures/dewiki/102/f6886b6fa708ee8c22bd8523dd8b4d2a.png) ,
,
wobei
 durchläuft.
durchläuft.- Polynome, die nur gerade Potenzen von x enthalten, haben die Form:

- Die Lösung erfolgt durch die Substitution
 . Hat man eine Lösung für z1 gefunden, so ist zu berücksichtigen, dass daraus zwei Lösungen für x abzuleiten sind:
. Hat man eine Lösung für z1 gefunden, so ist zu berücksichtigen, dass daraus zwei Lösungen für x abzuleiten sind:  und
und 
- Polynome, die nur ungerade Potenzen von x enthalten, haben die Form:

- Hier ist offensichtlich 0 eine Nullstelle des Polynoms. Man dividiert das Polynom durch x aus und behandelt es dann wie ein Polynom (n-1)-ten Grades, welches nur gerade Potenzen von x enthält
Polynome in der linearen Algebra
- Der Vektorraum aller reellen Polynomfunktionen beliebigen aber endlichen Grades ist ein Beispiel für einen Vektorraum in der linearen Algebra, der sich nicht offensichtlich mittels geometrischer Vorstellungen veranschaulichen lässt.
- Das charakteristische Polynom wird unter anderem bei der Diagonalisierung von Matrizen berechnet und untersucht.
Polynome in der abstrakten Algebra
Definition
In der abstrakten Algebra ist ein Polynom eine formale Summe der Form
wobei die Koeffizienten ai aus einem Ring R stammen und X ein formales Symbol ist.
Zwei Polynome sind genau dann gleich, wenn sie in allen Koeffizienten übereinstimmen. Polynome werden koeffizientenweise addiert und die Multiplikation ergibt sich mit dem Distributivgesetz aus den Regeln
 für alle
für alle 
 für natürliche Zahlen m und n.
für natürliche Zahlen m und n.
Als Produkt ergibt sich aus der Cauchy-Produktformel :
wobei ak = 0 für alle k > n und bi − k = 0 für alle i − k > m.
Stellt man Polynome durch die Folge ihrer Koeffizienten dar, dann ist das Produkt zweier Polynome die Faltung ihrer Koeffizientenfolgen.
Polynomfunktion
Indem man an Stelle von X ein Element x des Rings R einsetzt, erhält man ein Element f(x) von R als Bild. Diese Zuordnung
 ist eine Funktion von R nach R, die von f induzierte Funktion, eine Polynomfunktion.
ist eine Funktion von R nach R, die von f induzierte Funktion, eine Polynomfunktion.In den Formeln wird dieser Unterschied nicht deutlich; meist schreibt man jedoch Unbestimmte als Großbuchstaben und Ringelemente als Kleinbuchstaben.
Die Unterscheidung ist jedoch wichtig, weil verschiedene Polynome dieselbe Polynomfunktion induzieren können. Ist beispielsweise R der Restklassenring
 , so induzieren die beiden Polynome
, so induzieren die beiden Polynomeund
- g(X) = 0
beide die Nullfunktion
- f(x) = g(x) = 0 für alle
 .
.
Für Polynome über den reellen oder ganzen Zahlen oder allgemein jedem unendlichen Integritätsbereich ist ein Polynom jedoch durch die induzierte Polynomfunktion bestimmt.
Polynomring
Die Menge aller Polynome mit Koeffizienten in einem Ring R und der Unbestimmten X bezeichnet man als R[X]. Sie ist mit der oben angegebenen Addition und Multiplikation ein Ring, der so genannte Polynomring über R.
Auch die Menge der Polynomfunktionen über dem Ring R bildet einen Ring, der jedoch nur selten betrachtet wird. Es gibt einen natürlichen Ring-Homomorphismus von R[X] in den Ring der Polynomfunktionen, dessen Kern die Menge der Polynome ist, die die Nullfunktion induzieren.
Für weitere Informationen siehe den Artikel Polynomring.
Verallgemeinerung
Allgemein versteht man jede Summe von Monomen der Form
 als Polynom (in mehreren Unbestimmten):
als Polynom (in mehreren Unbestimmten):
- Lies: „Groß-p von Groß-x-1 bis Groß-x-n (ist) gleich die Summe über alle i-1 bis i-n von a-i-1-bis-i-n mal Groß-x-1 hoch i-1 bis Groß-x-n hoch i-n“
Die Größe
 heißt der Totalgrad eines Monoms
heißt der Totalgrad eines Monoms  . Haben alle (nichtverschwindenden) Monome in einem Polynom denselben Totalgrad, so heißt es homogen. Der maximale Totalgrad aller nichtverschwindenden Monome ist der Grad des Polynoms.
. Haben alle (nichtverschwindenden) Monome in einem Polynom denselben Totalgrad, so heißt es homogen. Der maximale Totalgrad aller nichtverschwindenden Monome ist der Grad des Polynoms.Die maximale Anzahl der möglichen Monome eines bestimmten Grades[1] kann man mit folgender Formel berechnen:
Wobei n die Anzahl der vorkommenden Variablen und k der Grad des Polynoms ist. Anschaulich wird hier ein Problem von Kombinationen mit Wiederholung (Zurücklegen) betrachtet.
Summiert man die Anzahl der möglichen Monome des Grades 0 bis k erhält man für die Anzahl der möglichen Monome in einem Polynom bestimmten Grades folgende Formel:
Sind alle Unbestimmten in gewisser Weise „gleichberechtigt“, so heißt das Polynom symmetrisch. Gemeint ist: wenn das Polynom sich bei Vertauschungen der Variablen nicht ändert.
Auch die Polynome in den n Unbestimmten
 über dem Ring R bilden einen Polynomring, geschrieben als
über dem Ring R bilden einen Polynomring, geschrieben als ![R[X_1, \ldots, X_n]](/pictures/dewiki/97/a604feb30023ec69ebd39dd7378f4d7a.png) .
.Geht man zu unendlichen Reihen der Form
- Lies: „f (ist) gleich die Summe von i gleich Null bis Unendlich von a-i (mal) (Groß-) x hoch i“
über, erhält man formale Potenzreihen.
Lässt man auch negative Exponenten zu:
Lies: „f (ist) gleich die Summe von i gleich minus (Groß-) n bis Unendlich von a−i (mal) (Groß-) x hoch i“
dann erhält man formale Laurentreihen.
Weblinks
- Java Applet zur Berechnung der (auch komplexen) Nullstellen von Polynomen maximal 24. Grades (nach dem Newton-Verfahren)
- Übersicht über die Eigenschaften von Ganzrationalen Funktionen
Einzelnachweise
- ↑ Ernst Kunz: Einführung in die algebraische Geometrie, S. 213, Vieweg+Teubner, Wiesbaden 1997, ISBN: 3528072873








Wikimedia Foundation.