- Lenkanlage
-
Als Lenkung bezeichnet man die Beeinflussung der Fahrtrichtung von Fahrzeugen aller Art.
Inhaltsverzeichnis
Allgemein
Durch die Lenkeinrichtung lässt sich ein nicht schienengebundenes Fahrzeug in eine gewollte Richtung steuern. Die Räder nehmen bei jedem Lenkeinschlag eine durch die Fahrwerksgeometrie bestimmte Stellung zueinander ein. Die Lenkung ermöglicht auch unter dem Einfluss von Bodenunebenheiten, negativen und positiven Beschleunigungen, Seitenkräften und der Witterung ein exaktes und sicheres Lenken. Der Winkel zwischen Radebene und Geradeauslaufstellung wird als Lenkwinkel bezeichnet. Das Lenkradmoment ist dem Lenkwinkel entgegengerichtet und ist ein von der Geschwindigkeit abhängiges Drehmoment an der Lenksäule.
Folgende Anforderungen werden an die Lenkung gestellt:
- eine präzise und schnelle Umsetzung der Lenkbewegung
- gute Rückstellung in einen stabilen Geradeauslauf
- leichte Bedienbarkeit
- gute Rückmeldung zum Fahrzustand
- Dämpfung von Stößen und Geräuschen
- Antriebs-, Brems- und Beschleunigungskräfte dürfen keinen Einfluss haben
- Verhinderung einer Verletzung bei einem Auffahrunfall
- geringes Gewicht bei geringem Bauaufwand und kleinem Verschleiß
Bei einspurigen Fahrzeugen (z. B. Motorrad) wird direkt über die Vorderradaufhängung und beim Anhängerfahrzeug durch Drehen der ganzen Achse gelenkt. In mehrspurige Kraftfahrzeuge werden vorzugsweise Achsschenkellenkungen eingebaut. Sie bieten eine hohe Standsicherheit sowie gute Fahrstabilität und haben einen geringen Raumbedarf.
Bestandteile der mechanischen Lenkung
- Lenkrad oder Lenkstange
- Lenksäule oder Vorbau
- Lenkgetriebe oder Fahrradgabel
- Umlenkhebel oder Deichsel
- Lenkungsdämpfer
- Lenkbegrenzer
- Spurstangen
- Achskörper
- Achsschenkel mit Lenkbolzen oder Kugelgelenk
- Einlenkung (1)
Es gibt viele verschiedene Lenkungsarten die abhängig von der Zahl der Räder, Achsen und dem Einsatzzweck verwendet werden. Am bekanntesten bzw. am häufigsten anzutreffen ist die Vorderradlenkung. Sie findet sich bei PKW, LKW, und Krafträdern.
Schwenkachslenkung / Drehschemellenkung
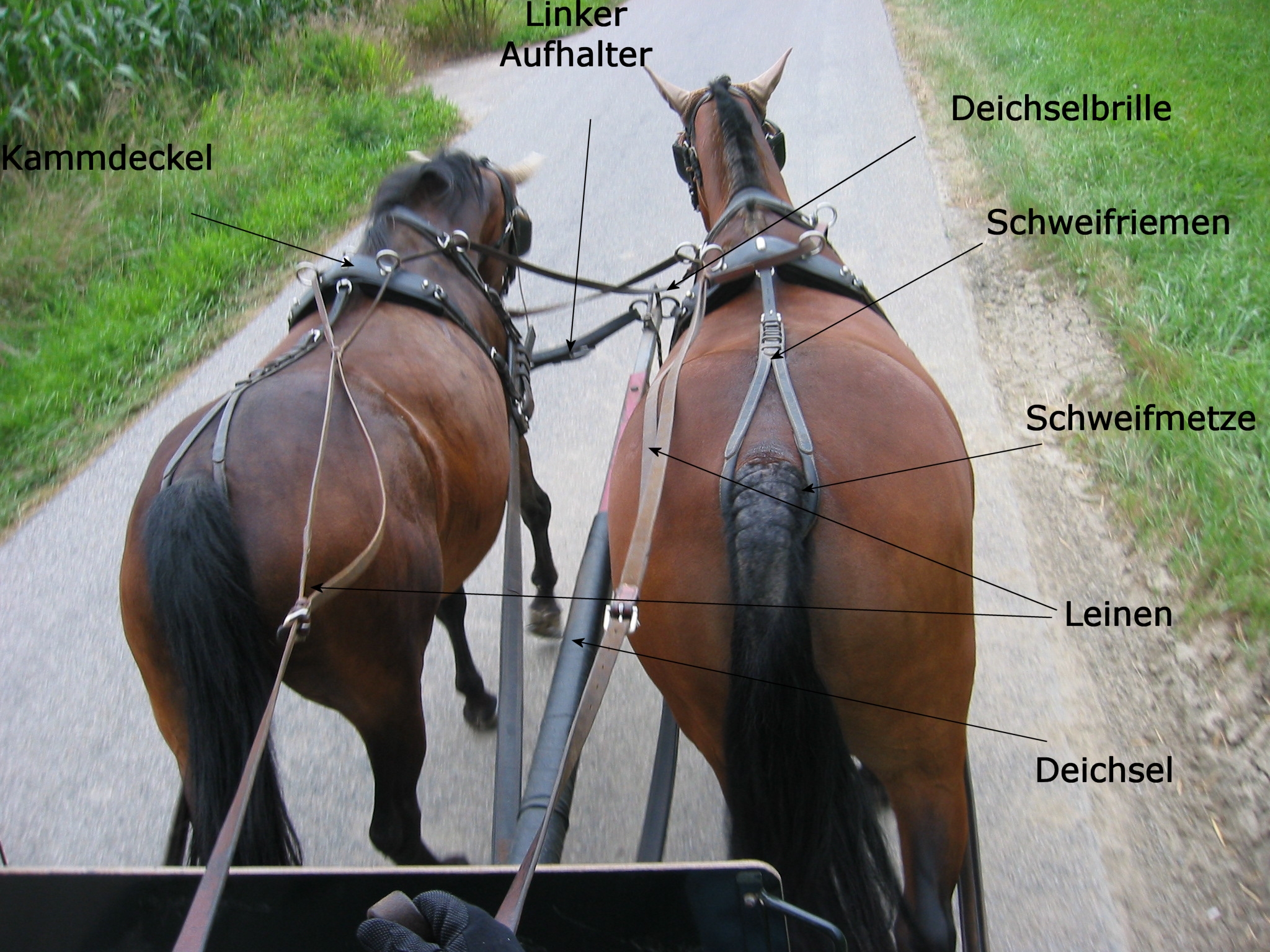
 Deichsel beim Zweispänner
Deichsel beim ZweispännerBei der Schwenkachslenkung erfolgt die Lenkung durch das Schwenken einer Starrachse, meist der Vorderachse. Die drehbare Verbindung von Achse zum Fahrzeug erfolgt mittels eines Bolzens oder eines Drehgestells (auch Drehschemel). Bei gezogenen Fahrzeugen wird die Lenkkraft über eine so genannte Deichsel auf die Vorderachse übertragen.
Nachteile der Schwenkachslenkung sind vor allem die Kippneigung des Fahrzeugs bei Volleinschlag als auch die Rückwirkung von Radkräften auf die Lenkung und die damit verbundene Instabilität.
Klassische Vertreter der Schwenkachslenkung sind Pferdekutschen und mehrachsige Anhänger aber auch die Seifenkiste. An kurzgekuppelten Hängerzügen werden mehrere Drehschemel (auch Drehkranz) verwendet. Dabei wird die Achse um verschiedene vertikale Drehpunkte bewegt, um dadurch ein Anschlagen der Fahrzeugecken an die Zugmaschine zu verhindern.
Knicklenkung
 Radlader mit Knicklenkung
Radlader mit KnicklenkungVerlegt man den Drehpunkt der Lenkung in die Mitte eines Fahrzeuges, so erhält man zwei Fahrzeughälften mit je einer Starrachse, die über ein starkes Gelenk verbunden sind. Die Knicklenkung bietet zwar mehr Stabilität im Vergleich zur Schwenkachslenkung, sie ist aber nur für wenige Fahrzeugtypen geeignet.
Knicklenkung sieht man heute vor allem bei Bau- und Arbeitsmaschinen.
Panzerlenkung
Bei Raupenkettenfahrzeugen oder Kraftfahrzeugen, die bauartbedingt keine gelenkte Achse haben, wird die Panzerlenkung eingesetzt. Eine Lenkbewegung wird durch Abbremsen oder Beschleunigen der Räder einer Antriebsseite erzeugt. Anwendungen: Panzer, Bagger und Hoflader.
Gabellenkung
Die Gabellenkung ist die einfachste Form der Einzelradlenkung und kommt bei einspurigen Fahrzeugen (Fahrrädern, Motorrollern) oder Dreirädern (auch manche Rollstühle und auch Gabelstapler) zur Anwendung, bei denen das in einer Gabel geführte einzelne Vorder- oder auch Hinterrad direkt angelenkt wird. Ihr Vorteil besteht in der seitlichen Symmetrie, das Lenkverhalten ist in beide Richtungen gleich.
Achsschenkellenkung
 Achsschenkellenkung
AchsschenkellenkungDie Achsschenkel-Lenkung, bei der jedes Vorderrad einer Achse für sich gedreht wird, wurde 1816 von dem Deutschen Georg Lankensperger als Hofwagner in München erfunden. Er ließ sie in England von dem Kunsthändler Rudolph Ackermann patentieren, weshalb sie dort unter dem Begriff "A-Steering" geführt wurde. Der theoretisch richtige Winkel der Vorderräder wird Ackermann-Winkel genannt. Die Achsschenkellenkung wurde im Jahr 1875 von Amédée Bollée (fr. Patent) und Carl Benz 1891 unabhängig voneinander neu erfunden[1].
Sie unterscheidet sich damit von der bei Kutschen üblichen drehbaren Deichsel mit Drehschemel-Lagerung.
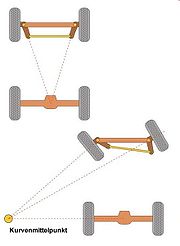
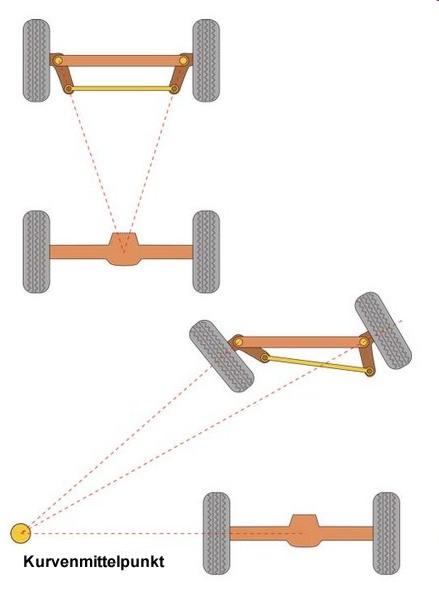
Seit der Erfindung des Kraftfahrzeugs wird die platzsparende Achsschenkel-Lenkung in diesem verwendet.Bei der Achsschenkellenkung entsteht nun das geometrische Problem verschiedener Kurvenradien der beiden angelenkten Räder. Um eine saubere Kurvenfahrt zu erreichen, muss jedes Rad auf einer eigenen Kreisbahn um den Kurvenmittelpunkt abrollen. Bei Schwenkachslenkung mit Starrachse ist dies automatisch der Fall. Bei der Einzelradlenkung jedoch muss das außen liegende Rad einen größeren Kreisbogen beschreiben als das innere. Dies erreicht man z. B. mittels eines Lenktrapezes, bestehend aus Achskörper, Spurstange und zwei Lenkhebeln. Diese Bauteile bilden so genannte Lenkvielecke (Lenkdreiecke, Lenkvierecke) und bewirken, dass die Verlängerung aller Radachsen sich im Kurvenmittelpunkt schneiden (Ackermann-Gesetz). Für die Lenkung selbst wird meist die Achsschenkellenkung verwendet. Auf dem Achskörper befindet sich der um den Achsschenkelbolzen drehbare Achsschenkel, der wiederum das Rad trägt.
Die Stellung des Achsschenkelbolzens erlaubt weitere Verbesserungen der Stabilität und Lenkbarkeit. Durch Spreizung, das heißt Neigen des Achsschenkelbolzens, sodass sich die Verlängerung desselben dem Aufstandspunkt des Rades nähert, erhält man weniger Lenkwiderstand und weniger Rückwirkung der Räder (z. B. durch Bremsen) auf die Lenkung. Durch Nachlauf, das heißt Neigen des Achsschenkelbolzens, sodass sich die Verlängerung desselben in Fahrtrichtung vor dem Aufstandspunkt des Reifens befindet, erreicht man eine automatische Rückstellung in den Geradeauslauf. Durch eine leichte Vorspur, die Räder stehen nicht parallel, sondern schließen sich in Fahrtrichtung, verbessert man den Geradeauslauf.
Die Achsschenkellenkung vermeidet die Nachteile der Schwenkachslenkung wie Kippneigung und starke Rückwirkung der Räder auf die Lenkung, man kann damit auch mehrachsig gelenkte Fahrzeuge realisieren.
Anwendungsgebiete der Achsschenkellenkung sind Vorderachslenker wie Personenkraftwagen, Lastkraftwagen und Zugmaschinen, aber auch hinterachsgelenkte Fahrzeuge wie Gabelstapler oder Erntemaschinen. Auch beim Motorrad Yamaha GTS 1000A kam diese Lenkung Anfang der neunziger Jahre zum Einsatz.
Lenktrapez
Das Lenktrapez ermöglicht unterschiedliche Einschlagwinkel der Vorderräder, wobei das kurveninnere Rad - abhängig von Fahrzeuggeometrie und Lenkeinschlag - zwischen Null und einige Grad mehr einlenkt (Spurdifferenzwinkel). Dies vermindert das "Radieren" der Reifen.
Das Lenktrapez ermöglicht die einfache Einstellung eines Spurdifferenzwinkels, liefert aber nur für max. 2 Einschlagwinkel die exakten geometrischen Verhältnisse; für alle anderen Einschlagwinkel kann das Lenktrapez die exakte Geometrie nur annähern.
Zur Ermittlung des Lenktrapezes gilt in erster Näherung die Faustregel, dass sich die Drehpunkte der Lenkhebel bei Geradeausstellung in der Mitte der Hinterachse treffen sollen (siehe obige Abbildung). Detaillierte Berechnungen zum Lenktrapez mit Hilfe eines einfachen EXCEL-Programms findet man in den Weblinks.
Eigenlenkung
Es gibt viele verschiedene Lenkungsarten die abhängig von der Zahl der Räder, Achsen und dem Einsatzzweck verwendet werden. Am bekanntesten bzw. am häufigsten anzutreffen ist die Vorderradlenkung. Sie findet sich bei PKW, LKW, und Krafträdern.
(1) Eigenlenkung:
Die Einlenkung eines Fahrzeuges wird durch einen sogenannten Einlenkkoeffizienten beschrieben. Dieser Koeffizient beschreibt dabei die integrale Ableitung des Lenkungsweges und der damit zurückgelegten Strecke des Rades in Bezug auf die z-Koordinate.
Dieser Koeffizient ist für die verschiedenen Fahrzeuge der Marke VW konstant:
VW Golf (1K) 2,5 VW Polo (9N2) 2,3 VW Passat (3C) 3,4
Spreizung
Die Lenkdrehachsen an jedem Rad sind leicht (ca. 5 bis 8 Grad) nach innen schräg zur Fz-Längsachse gegenüber einer Senkrechten zur Fahrbahn angeordnet. Beim Einschlagen der Räder bewirkt die Spreizung, dass das Fz vorne minimal angehoben wird.
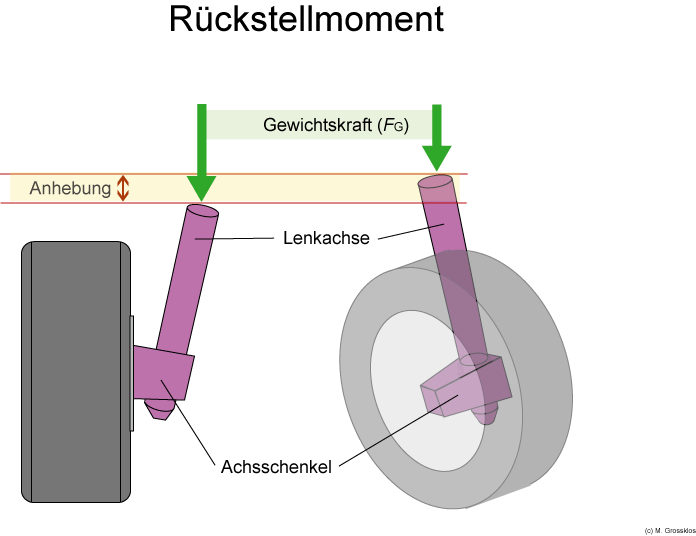
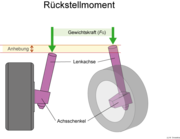 Rückstellmoment
RückstellmomentRückstellmoment
Unter Rückstellmoment versteht man die Rückstellung der Räder zum Ausgangspunkt, also in gerader paralleler Stellung zum Fahrzeug. Das Rückstellmoment muss dann eintreten, wenn der Fz-Führer das Lenkrad loslässt. Diese Automation ergibt sich durch die Bauart der Lenkung mit der Spreizung der Lenkdrehachsen. Durch die Gewichtskraft des Fz entsteht ein Moment, welches die selbstständige Rückstellung der Räder zur Geradeausfahrt bewirkt.
Die Gewichtskraft wird dabei meist vom Motor erzeugt. Die Lenkung wird nun wieder in die Ausgangsstellung gedrückt. Diese Rückführung der Lenkung ist laut Straßenverkehrsordnungen vorgeschrieben.
Dabei sei darauf hingewiesen, dass dies streng nur für den Fall eines positiven Lenkrollhalbmessers gilt. Für den negativen Lenkrollhalbmesser würde der Aufbau aufgrund der Spreizung beim Einlenken eine Absenkung erfahren, was zu einem negativen Rückstellmoment führen würde. Neben diesem statischen Rückstellmoment, das auch ohne das Vorhandensein von Reifenseitenkräften auftritt, gibt es ein weiteres Rückstellmoment, das aus dem konstruktiven Nachlauf sowie dem so genannten Reifennachlauf resultiert. Dabei erzeugen die Reifenseitenkräfte, deren Verteilungsschwerpunkt im Reifenlatsch einen Abstand zum Durchstoßpunkt der Lenkachse durch die Fahrbahnebene (Nachlauf) hat, ein Drehmoment, das den Radlenkwinkel zu reduzieren versucht. Da die Reifenseitenkraft bei niedrigen Querbeschleunigungen proportional dem Reifenschräglaufwinkel ist, nimmt das Rückstellmoment bei Rückkehr der Räder in Neutralstellung (Radlenkwinkel = 0) wieder ab, vorausgesetzt, der Fahrzeugschwimmwinkel (Winkel zwischen Fahrzeuglängsachse und momentaner, horizontaler Bewegungsrichtung des Fahrzeugaufbaus) ist ebenfalls Null.
positiver Lenkrollhalbmesser
Unter einem positiven Lenkrollhalbmesser bezeichnet man die positive Differenz aus Spurbreite - Lenkspurweite (siehe Darstellung). D.h. der Abstand der Durchstoßpunkte der Lenkachse(n) durch die Fahrbahnebene ist kleiner als die Spurbreite. Bei modernen Vorderachskonstruktionen ist mittlerweile auch der sog. negative Lenkrollhalbmesser etabliert, bei dem die Spurbreite kleiner ist als die Lenkspurweite. Die Gründe hierfür liegen in einer besseren Fahrzeugstabilität bei µ-split-Bremsungen durch ein längskraftinduziertes Lenkmoment und eines damit einhergehenden Giermomentenaufbaus, der dem Längskraftdifferenzbedingten Giermoment entgegenwirkt. Bei Bremsungen auf sog. µ-split-Verhältnisse (links/rechts unterschiedlich hoher Reibwert µ) tritt grundsätzlich das Problem auf, dass aufgrund der unterschiedlichen Längs-/Bremskräfte ein Giermoment (Moment um die Hochachse) entsteht, das das Auto instabil werden lassen kann und es in Richtung Hoch-µ-Seite dreht. Durch den negativen Lenkrollhalbmesser wird allein aufgrund der unterschiedlichen Längskräfte ein Lenkmoment erzeugt, das die Räder in die Gegenrichtung (in Richtung low-µ-Seite) einschlagen lässt. Somit wird ein Gegengiermoment zur Abstützung des Längskraftdifferenz-bedingten Giermomentes erzeugt und die Belastung des Fahrers hinsichtlich Gegenlenkens gesenkt. Darüber hinaus kann die Auslegung der Fahrdynamikregelsysteme für diesen Fall weiter in Richtung Bremswegverkürzung optimiert werden, da der Zielkonflikt zwischen Stabilität und Bremsweg durch diesen lenkungskonstruktiven Ansatz abgeschwächt wird.
negativer Lenkrollhalbmesser
Die verlängerte Lenkdrehachse trifft die Fahrbahn außerhalb der Mitte der Reifenaufstandsfläche zur Reifenaußenseite hin.
Negativer Lenkrollhalbmesser wird z.B. durch die Verwendung von tiefen Radschüsseln oder Faustsattel-Scheibenbremsen ermöglicht. Die an einem Rad angreifenden Bremkräfte ergeben ein Drehmoment, welches das Rad vorne zur Innenseite schwenkt, da der Drehpunkt auf der Reifenaußenseite liegt. Treten z.B. beim Bremsen unterschiedliche Haftverhältnisse auf (ein Rad auf trockener, das andere auf vereister Fahrbahn oder bei Reifendefekt), so wird das Rad mit der größeren Haftwirkung stärker nach innen geschwenkt. Dadurch entsteht ein selbsttätiges Gegenlenken, welches dem Bestreben eines Fahrzeugs, zu Seite des stärker gebremsten Rades hinzuziehen, entgegenwirkt.
Lenkrollhalbmesser Null
Die verlängerte Lenkachse trifft die Fahrbahn genau in der Mitte der Reifenaufstandsfläche.
Merkmale:
- Geringer Einfluss von Störkräften beim Fahren auf die Lenkung. - Bei stehendem Fahrzeug schwenkt das Rad bei Lenkeinschlag auf der Stelle.
Lenkbremse
Hier handelt es sich im Prinzip um das Lenken eines einachsigen Fahrzeuges mit Starrachse durch verschiedene Brems- oder Antriebskräfte an beiden Rädern. Ein motorgetriebenes Fahrzeug mit Lenkbremse benötigt deshalb zwingend ein Differentialgetriebe. Dabei werden jeweils ein oder alle Räder einer Fahrzeugseite gebremst, während die anderen ungebremst durch das Differentialgentriebe schneller drehen. Dadurch ergibt sich der Vorteil unter anderem eines kleineren Wendekreises.
Lenkbremsung kommt zur Anwendung bei Rollstuhl, Kettenfahrzeug, Zugmaschine mit wenig Vorderachslast, bei Traktoren zusätzlich zur Achsschenkellenkung.
Lenkung moderner Kraftfahrzeuge
In heutigen Kraftfahrzeugen wird beinahe ausschließlich Achsschenkellenkung meist als Einzelradaufhängung verwendet. Dabei entfällt ein durchgehender Achskörper, eine geteilte Lenkstange ersetzt die Spurstange und statt des Achsschenkelbolzens findet man eine Drehachse aus Federbein und Stützlager (Domlager). Die Lenkkraftübertragung erfolgt vom Lenkrad über die Lenksäule auf ein Lenkgetriebe, von dort auf die Lenkstange über die Lenkhebel auf die Achsschenkel. Um mit geringen Lenkbewegungen und geringer Kraft die aufgrund immer schwererer PKWs und immer breiterer Reifen immer größeren Lenkkräfte aufzubringen, kommt in den meisten Fällen ein Lenkkraftverstärker, die Servolenkung zum Zug. Immer öfter treten auch Fahrzeuge mit mehreren gelenkten Achsen auf, teils um die Manövrierbarkeit zu erhöhen wie bei Bussen und LKWs, aber auch im Rahmen von Stabilitätsprogrammen bei PKWs. Die Lenkgeometrie wird dabei durch geeignete Lenkgetriebe oder auf elektronischem Wege erreicht. Siehe hierzu auch: Dynamiklenkung, Aktivlenkung
Normierende Vorgaben für die Lenkanlagen von Kraftfahrzeugen und Kraftfahrzeuganhängern für den Straßenverkehr in Europa sind die EG-Richtlinien 70/311/EWG und 75/321/EWG sowie die damit äquivalente ECE-Regel ECE-R 79. Die deutsche Straßenverkehrs-Zulassungsverordung verweist ihrerseits in §38(2) "Lenkeinrichtung" und dem zugehörigen Anhang auf diese EG-Richtlinie.
Lenkarten
In Bezug auf das ganze Fahrzeug gibt es verschiedene Lenkarten:
- Die Zweiradlenkung ist die gängigste Form der Lenkung bei den meisten Straßenfahrzeugen, bei der die beiden Räder derselben Achse gelenkt werden.
- Vorderachslenkung ist die übliche Lenkung bei den meisten Kraftfahrzeugen.
- Hinterradlenkung wird oft an Spezialfahrzeugen wie Gabelstaplern oder Mähdreschern verwendet, weil andere Bauteile den Einbau vorne unmöglich machen.
- Doppelvorderradlenkung wird die Lenkung auf zwei kurz hintereinander liegende Vorderachsen genannt. Diese Lenkung wird verwendet, um bei losem oder rutschigem Untergrund ein Untersteuern zu vermeiden und wird bei Spezialfahrzeugen verwendet. Ein weiterer Einbaugrund ist das Vermeiden von starkem Reifenverschleiß durch das typische "Radieren" von Doppelachsen während der Kurvenfahrt(Ackermann-Gesetz). Oft wird diese Lenkungsart mit Allradantrieb verbunden. Man findet sie zum Beispiel bei 3-achsigen Sattelzugschleppern, 4-achsigen Baustellen-LKW und Schwerlast-LKW
- Vorderradlenkung bei 3-achsigen Fahrzeugen besteht aus der lenkbaren Vorderachse und zwei eng stehenden Hinterachsen (Doppelachse). Unter Kurvenfahrt können die Hinterachsen nicht mit der Vorderachse auf einer Kreisbahn rollen, sondern bewegen sich schräg zu ihrer eigenen Rollrichtung. Sie radieren auf der Straße und zwingen dem Fahrzeug ein Untersteuerndes Verhalten auf. Diese Lenkungsart wird üblicherweise bei Fahrzeugen mit großen Nutzlasten, LKW und ihre Anhänger, verwendet.
- Allradlenkung Alle Räder eines Fahrzeugs können gelenkt werden. Das ergibt einen kleinen Wenderadius und hat bei Allradantrieb einen weiteren Vorteil: Der Antrieb kann in die gelenkte Richtung erfolgen. Eine Allradlenkung wird unter anderem in landwirtschaftlichen Fahrzeugen oder bei Schwerlasttransportern verwendet. :
- Proportionallenkung, bei der die Hinterräder in einem bestimmten Verhältnis zu den Vorderrädern eingeschlagen werden, beispielsweise das Vorderrad bewegt sich um 2°, das Hinterrad entsprechend um 1°.
- Gleichlauflenkung, bei der die Vorder- und Hinterräder gleichmäßig verdreht werden, was zur Folge hat, dass die Hinterräder genau in der Spur der Vorderräder nachlaufen.
- Verzögerungslenkung, bei der die Hinterräder erst bei einem bestimmten Winkel der Vorderräder verdreht werden .
- Hundeganglenkung ist eine vor allem in der Landwirtschaft eingesetzte Lenkung. Dabei werden die Vorderräder und die Hinterräder in die gleiche Richtung verdreht. Das ergibt bei einer Geradeausfahrt eine zur Vorderachse versetzte Hinterachse. Dadurch wird der Boden geschont.
- Vorderrad-Hinterradlenkung wird bei 3-achsigen Nutzfahrzeugen mit einer doppelten Hinterachse verbaut. Bei ihr lenkt zusätzlich zur Vorderachse eine der beiden Hinterachsen mit. Ist die erste Hinterachse die Lenkachse so lenkt diese gleichsinnig zur Vorderachse. Die zweite Hinterachse würde dagegen gegensinnig zur Vorderachse einlenken. Da ein Radieren der Hinterachsen vermieden wird, ist das Fahrzeug damit wendiger und leichter zu handhaben. Anwendung vor allem bei schweren LKW, die oft auf engem Terrain bewegt werden müssen (z. B. Müllwagen).
Kraftübertragung
Zur Übertragung der Lenkbewegung des Wagen- oder Fahrzeuglenkers auf die Achslenkung und Räder besitzen Fahrzeuge ein Lenkgetriebe oder einen Stellantrieb:
- die Gabel der Gabellenkung ist mit einem Lenker verbunden oder besitzt einen Stellantrieb
- die Lenkung eines Pferdefuhrwerkes erfolgt mit Zügeln und Trensen
- die Rosslenkung ist eine Abart der Schneckenlenkung (Schneckentrieb)
- die Zahnstangenlenkung benutzt einen Zahnstangenantrieb
- eine hydraulische Lenkung kann allein (z.B. bei der Knicklenkung) oder als Lenkhilfe dienen
- die Lenkung mit elektrischen Antrieben kann entweder mit einem separaten Stellantrieb (zum Beispiel eines ferngesteuerten Fahrzeuges) oder über die unsymmetrische Steuerung der elektrischen Einzelradantriebe der Räder erfolgen (zum Beispiel beim Segway Personal Transporter)
Siehe auch: Themenliste Fahrzeugtechnik, Lenkung von Flugzeugen: Flugsteuerung, Lenkung von Schiffen: RuderHersteller
Die bekanntesten Hersteller solcher Lenkungen sind:
Literatur
- Erik Eckermann, Die Achsschenkellenkung und andere Fahrzeug-Lenksysteme. München: Deutsches Museum 1998. ISBN 3-924183-51-1
Einzelnachweise
- ↑ Ein Jahrhundert Automobiltechnik – Nutzfahrzeuge, Seite 164, 174, 175. VDI-Verlag 1987 ISBN ISBN 3-18-400656-6 (formal falsche ISBN)
Weblinks

Wikimedia Foundation.