- Permutationssymbol
-
Das Levi-Civita-Symbol
 , auch Permutationssymbol, (ein wenig nachlässig) total antisymmetrischer Tensor oder Epsilon-Tensor genannt, ist ein Symbol, das in der Physik bei der Vektor- und Tensorrechnung nützlich ist. Das Symbol bezeichnet die Komponenten eines Tensors n-ter Stufe. Es ist benannt nach dem italienischen Mathematiker Tullio Levi-Cività (1873−1941). In der Mathematik spricht man stattdessen meist vom Vorzeichen der entsprechenden Permutation, siehe Alternierende Gruppe.
, auch Permutationssymbol, (ein wenig nachlässig) total antisymmetrischer Tensor oder Epsilon-Tensor genannt, ist ein Symbol, das in der Physik bei der Vektor- und Tensorrechnung nützlich ist. Das Symbol bezeichnet die Komponenten eines Tensors n-ter Stufe. Es ist benannt nach dem italienischen Mathematiker Tullio Levi-Cività (1873−1941). In der Mathematik spricht man stattdessen meist vom Vorzeichen der entsprechenden Permutation, siehe Alternierende Gruppe.Die n Indizes i1 bis in haben Werte von 1 bis n. Haben zwei Indizes denselben Wert, so ist
 . Sind die Werte der Indizes paarweise verschieden, so gibt das Symbol an, ob eine gerade (
. Sind die Werte der Indizes paarweise verschieden, so gibt das Symbol an, ob eine gerade ( ) oder eine ungerade (
) oder eine ungerade ( ) Anzahl von Vertauschungen der Indizes nötig ist, um die Werte aufsteigend anzuordnen. Zum Beispiel ist
) Anzahl von Vertauschungen der Indizes nötig ist, um die Werte aufsteigend anzuordnen. Zum Beispiel ist  , da eine Vertauschung nötig ist, um 132 in die Reihenfolge 123 zu bringen.
, da eine Vertauschung nötig ist, um 132 in die Reihenfolge 123 zu bringen.Inhaltsverzeichnis
Definition
Das Levi-Civita-Symbol in n Dimensionen hat n Indizes, die gewöhnlich von 1 bis n (für manche Anwendungen auch von 0 bis n-1) laufen. Es wird durch folgende Eigenschaften definiert:
 .
.- Unter Vertauschung zweier Indizes ändert es das Vorzeichen:
 .
.
Aus der zweiten Eigenschaft folgt sofort: Falls zwei Indizes gleich sind, ist der Wert null:
 .
.Gleichwertig ist die Definition
Eine alternative Definition verwendet eine Formel, welche auch für die Definition des Signums einer Permutation benutzt wird:
 .
.
Es bezeichne
 die Menge der natürlichen Zahlen von 1 bis n. Man kann das Levi-Civita-Symbol als eine Abbildung
die Menge der natürlichen Zahlen von 1 bis n. Man kann das Levi-Civita-Symbol als eine Abbildung  auffassen mit
auffassen mit  , falls i nicht bijektiv ist und
, falls i nicht bijektiv ist und  sonst (also das Signum von i, falls i eine Permutation ist).
sonst (also das Signum von i, falls i eine Permutation ist).Zusammenhang mit der Determinante
Die Determinante einer
 -Matrix
-Matrix  kann mit dem Levi-Civita-Symbol und der Summenkonvention wie folgt geschrieben werden:
kann mit dem Levi-Civita-Symbol und der Summenkonvention wie folgt geschrieben werden:Allgemeiner gilt der Zusammenhang
 .
.
Setzt man in diese Beziehung für A die Einheitsmatrix En ein, also für Aij das Kronecker-Delta δij, so erhält man wegen detE = 1 die folgende Darstellung des Levi-Civita-Symbols:
 .
.
Dabei sind die Spalten der Matrix die Einheitsvektoren aus der Standardbasis
 des
des  . Diese Matrix ist also die Transponierte derjenigen Permutationsmatrix, welche den Vektor
. Diese Matrix ist also die Transponierte derjenigen Permutationsmatrix, welche den Vektor  auf
auf  abbildet. Daraus erhält man mit Hilfe der Produktregel für Determinanten einen Ausdruck für das folgende Tensorprodukt:
abbildet. Daraus erhält man mit Hilfe der Produktregel für Determinanten einen Ausdruck für das folgende Tensorprodukt: .
.
Unter Verwendung des laplaceschen Entwicklungssatzes erhält man daraus die folgende Beziehung, wenn man über die jeweils ersten k Indizes beider Tensoren verjüngt:
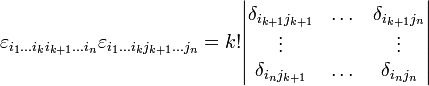 .
.
Als Komponenten eines Tensors
Das Levi-Civita-Symbol bezeichnet die Komponenten eines vollständig antisymmetrischen Tensors, auch Volumenform genannt. Ein solcher Tensor ist nur bis auf einen skalaren Faktor bestimmt. Die Wahl des Vorfaktors fixiert die Volumeneinheit. Im euklidischen Raum steht das Levi-Civita-Symbol für die Komponenten des Standardvolumens in der Standardbasis
 . Bezüglich einer anderen Basis e'i = Cjiej hat derselbe Tensor offenbar die Komponenten
. Bezüglich einer anderen Basis e'i = Cjiej hat derselbe Tensor offenbar die Komponenten  , wobei C = (Cij) und C − 1 die dazu inverse Matrix ist. Ist die Basis nicht orthonormal bezüglich des euklidischen Skalarprodukts, dann unterscheiden sich entsprechend ko- und kontravariante Komponenten des Tensors. Der Vorfaktor hängt von den Koordinaten ab, wenn krummlinige Koordinaten verwendet werden oder der zugrunde liegende Basisraum eine (orientierbare) Mannigfaltigkeit ist. Für eine semi-riemannsche Mannigfaltigkeit mit metrischem Tensor g und der zugehörigen riemannschen Volumenform (siehe Hodge-Stern-Operator) ist der Vorfaktor gegeben durch
, wobei C = (Cij) und C − 1 die dazu inverse Matrix ist. Ist die Basis nicht orthonormal bezüglich des euklidischen Skalarprodukts, dann unterscheiden sich entsprechend ko- und kontravariante Komponenten des Tensors. Der Vorfaktor hängt von den Koordinaten ab, wenn krummlinige Koordinaten verwendet werden oder der zugrunde liegende Basisraum eine (orientierbare) Mannigfaltigkeit ist. Für eine semi-riemannsche Mannigfaltigkeit mit metrischem Tensor g und der zugehörigen riemannschen Volumenform (siehe Hodge-Stern-Operator) ist der Vorfaktor gegeben durch  . Das Vorzeichen hängt von der gewählten Orientierung ab. Der Zusammenhang zwischen Levi-Civita-Symbol und Kronecker-Delta verallgemeinert sich zu
. Das Vorzeichen hängt von der gewählten Orientierung ab. Der Zusammenhang zwischen Levi-Civita-Symbol und Kronecker-Delta verallgemeinert sich zu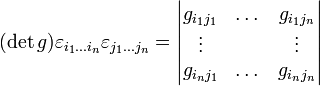 .
.
Anwendungen
Vektorrechnung
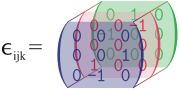
Für den dreidimensionalen Fall ergibt sich
wobei
 .
. Levi-Civita-Symbol
Levi-Civita-Symbol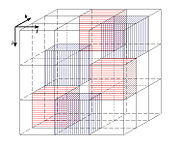 Levi-Civita-Symbol
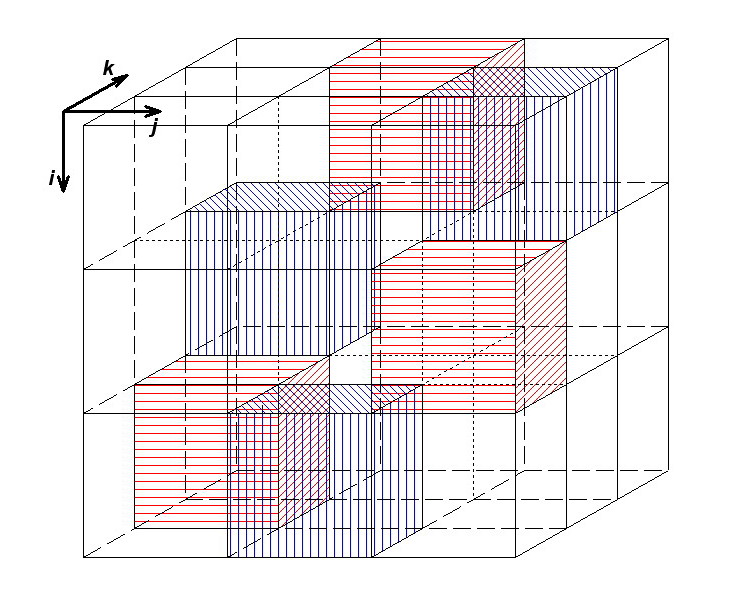
Levi-Civita-SymbolLediglich sechs der 27 Komponenten von
 sind ungleich null:
sind ungleich null:In diesem Beispiel erkennt man ferner eine Invarianz unter zyklischer Permutation der Indizes. Dies gilt allgemein nur dann, wenn n ungerade ist. Im anderen Fall geht eine zyklische Permutation mit einem Vorzeichenwechsel einher.
Das folgende Zahlenbeispiel demonstriert die Darstellung als Determinante, welche im dreidimensionalen Fall auch durch das Spatprodukt ausgedrückt werden kann:
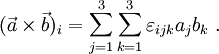
Das Levi-Civita-Symbol mit drei Indizes erweist sich in der Vektorrechnung als nützlich, um die Komponenten des Kreuzproduktes zweier Vektoren zu schreiben. Es gilt
Bei solchen Rechnungen wird häufig die einsteinsche Summenkonvention angewandt, das heißt, man lässt die Summenzeichen weg und vereinbart, dass über in Produkten doppelt auftretende Indizes stets automatisch summiert wird:
Ist
 der i-te Einheitsvektor, so kann diese Gleichung auch notiert werden als:
der i-te Einheitsvektor, so kann diese Gleichung auch notiert werden als:Für das Spatprodukt gilt
 .
.
In dieser Beziehung wird die Eigenschaft des Levi-Civita-Symbols als Komponenten einer Volumenform deutlich, denn das Spatprodukt ist gleich dem Volumen des von den drei Vektoren aufgespannten Spates.
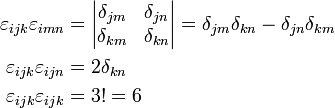
Für den Zusammenhang zwischen dem Epsilon-Tensor und dem Kronecker-Delta erhält man die Beziehung
 .
.
Aus dieser folgt
(wiederum mit Summenkonvention). Diese Beziehungen sind hilfreich bei der Herleitung von Identitäten für das Kreuzprodukt.
Weiterhin ordnet der Epsilon-Tensor einem Vektor
 eine schiefsymmetrische Matrix A mit
eine schiefsymmetrische Matrix A mit  zu. Damit kann das Kreuzprodukt als Matrixprodukt
zu. Damit kann das Kreuzprodukt als Matrixprodukt  ausgedrückt werden. In der Mathematik wird diese Zuordnung als Hodge-*-Operator bezeichnet. Ein Beispiel ist die Zuordnung des magnetischen Feldvektors zu den entsprechenden Komponenten im elektromagnetischen Feldstärketensor. Solch eine Zuordnung ist auch für andere axiale Vektoren, etwa für den Drehimpulsvektor, üblich.
ausgedrückt werden. In der Mathematik wird diese Zuordnung als Hodge-*-Operator bezeichnet. Ein Beispiel ist die Zuordnung des magnetischen Feldvektors zu den entsprechenden Komponenten im elektromagnetischen Feldstärketensor. Solch eine Zuordnung ist auch für andere axiale Vektoren, etwa für den Drehimpulsvektor, üblich.Relativitätstheorie
In der Relativitätstheorie muss zwischen ko- und kontravarianten Komponenten des Epsilon-Tensors unterschieden werden. Im Folgenden sei im vierdimensionalen Minkowski-Raum die Signatur des metrischen Tensors
 als (1,-1,-1,-1) festgelegt. Die Indizes sollen Werte von 0 bis 3 annehmen. Weiterhin sei für die vierfach kontravariante Komponente
als (1,-1,-1,-1) festgelegt. Die Indizes sollen Werte von 0 bis 3 annehmen. Weiterhin sei für die vierfach kontravariante Komponente  festgelegt.[1] Unterschiedliche Autoren verwenden verschiedene Konventionen für die Vorzeichen in Metrik und Epsilon-Tensor. Wie üblich werden Indizes mit dem metrischen Tensor bewegt. Dann erhält man zum Beispiel für die vierfach kovariante Komponente
festgelegt.[1] Unterschiedliche Autoren verwenden verschiedene Konventionen für die Vorzeichen in Metrik und Epsilon-Tensor. Wie üblich werden Indizes mit dem metrischen Tensor bewegt. Dann erhält man zum Beispiel für die vierfach kovariante Komponente  . Der Epsilon-Tensor kann verwendet werden, um den dualen elektromagnetischen Feldstärketensor
. Der Epsilon-Tensor kann verwendet werden, um den dualen elektromagnetischen Feldstärketensor  zu definieren, mit dessen Hilfe sich wiederum die homogenen Maxwell-Gleichungen
zu definieren, mit dessen Hilfe sich wiederum die homogenen Maxwell-Gleichungen  kompakt notieren lassen.
kompakt notieren lassen.
Eine Anwendung des zweistufigen Epsilon-Tensors in der Relativitätstheorie ergibt sich, wenn man den Minkowski-Raum auf den Vektorraum der hermiteschen -Matrizen abbildet:
-Matrizen abbildet:  . Dabei sind
. Dabei sind  für
für  die Pauli-Matrizen und
die Pauli-Matrizen und  die negative Einheitsmatrix. Entsprechend erfolgt dann die Zuordnung von Tensoren. Der metrische Tensor wird dabei auf das Produkt zweier Epsilon-Tensoren abgebildet:
die negative Einheitsmatrix. Entsprechend erfolgt dann die Zuordnung von Tensoren. Der metrische Tensor wird dabei auf das Produkt zweier Epsilon-Tensoren abgebildet:  . In diesem Formalismus sind Objekte mit einem Index Spinoren
. In diesem Formalismus sind Objekte mit einem Index Spinoren  , und der Epsilon-Tensor spielt bei der Umrechnung von ko- in kontravariante Komponenten die gleiche Rolle wie der metrische Tensor
, und der Epsilon-Tensor spielt bei der Umrechnung von ko- in kontravariante Komponenten die gleiche Rolle wie der metrische Tensor  im gewöhnlichen Minkowski-Raum:
im gewöhnlichen Minkowski-Raum:  . Dieser Formalismus ist unter dem Namen Van-der-Waerden-Notation bekannt. Für die Metrik wird üblicherweise die Signatur (-1,1,1,1) gewählt. Für den Epsilon-Tensor gilt hierbei die Festlegung
. Dieser Formalismus ist unter dem Namen Van-der-Waerden-Notation bekannt. Für die Metrik wird üblicherweise die Signatur (-1,1,1,1) gewählt. Für den Epsilon-Tensor gilt hierbei die Festlegung  .[2]
.[2]Quantenmechanik
In der Quantenmechanik wird das Levi-Civita-Symbol bei der Formulierung der Drehimpulsalgebra verwendet. In mathematischen Begriffen ausgedrückt stimmt das Symbol mit den Strukturkonstanten der Lie-Algebren
 überein. Das folgende Beispiel illustriert die Anwendung des Levi-Civita-Symbols in diesem Zusammenhang. Die Lie-Algebra
überein. Das folgende Beispiel illustriert die Anwendung des Levi-Civita-Symbols in diesem Zusammenhang. Die Lie-Algebra  kann als die Unteralgebra der schiefsymmetrischen Matrizen in
kann als die Unteralgebra der schiefsymmetrischen Matrizen in  , das heißt der reellen
, das heißt der reellen  -Matrizen, dargestellt werden. Die Generatoren (eine Basis) von ist gegeben durch die Matrizen
-Matrizen, dargestellt werden. Die Generatoren (eine Basis) von ist gegeben durch die Matrizen  , i = 1,2,3, mit den Komponenten
, i = 1,2,3, mit den Komponenten  . Die Kommutatoren der Generatoren lauten dann
. Die Kommutatoren der Generatoren lauten dann ![[T_i,T_j]=\varepsilon_{ijk}T_k](/pictures/dewiki/55/7d043c1959429612e595a237f60a9bca.png) .
.Einzelnachweise








Wikimedia Foundation.