- Plotextraktor
-
Als Plotextraktor wird eine Baugruppe in einem Radargerät bezeichnet, in welcher aus den analogen Echosignalen ein digitales Zielzeichen für die Anzeige auf dem Radarschirm gebildet wird. Die Bezeichnung ist nicht einheitlich. Teilweise wird die gesamte Oberbaugruppe zur Zieldatenverarbeitung als Plotextraktor benannt, teilweise auch nur die Unterbaugruppe darin, welche aus den Echosignalen des lokalen Radargerätes ein standardisiertes Datenformat erzeugt. Im ersten Fall wird diese Unterbaugruppe dann Hit-Processor genannt.
Die Baugruppen des Plotextraktors bilden den Abschluss der Radarsignalverarbeitung. Hier wird aus jedem (analogen oder meist digitalen) Videosignal ein Datensatz generiert. Es können auch Zusatzinformationen wie Kurs und Geschwindigkeit mit verarbeitet werden. Die praktischen Systemlösungen reichen von einfacher Positionsbestimmung bis hin zu den verschiedenen Filtern und Signalkanälen der Festzielunterdrückung bis zu komplizierten Spektrumvergleichsanalysen unter Anwendung von Datenbanken.
Inhaltsverzeichnis
Herkunft des Namens
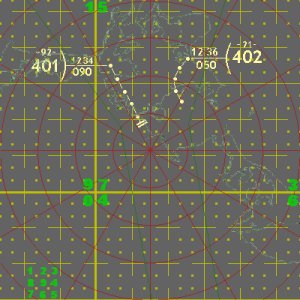
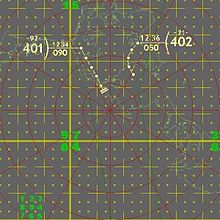 historisches Planchette (Luftlagekarte) mit den gelben Plots
historisches Planchette (Luftlagekarte) mit den gelben Plots
In vergangenen Zeiten mit manueller Zielzeichenverarbeitung wurden die Ziele mit einem für das Schreiben auf Glas geeigneten Stift (einem so genannten „Fettstift“) an ein Planchette aufgetragen. Der Zeichner wurde scherzhaft als Plotter bezeichnet und sein Werk folglich als Plot (Zeichnung eines Plotters). Somit hat sich in der von der englischen Sprache beeinflussten westlichen Welt die Bezeichnung Plot auch für die Darstellung von Radardaten durchgesetzt.
Funktionsweise
Ein Radargerät beobachtet die Umgebung und liefert von den entdeckten Objekten am Empfängerausgang analoge Impulse. Weil sich aber die Radarantenne gemessen an der Impulsfolgefrequenz langsam dreht, erhält das Radar von einem reflektierenden Objekt oft sehr viele Echosignale. Da sich die Radarantenne aber kontinuierlich weiterdreht, hat jeder Impuls eine andere Seitenwinkelzuordnung. Aus diesen Einzelimpulsen wird im Plotextraktor nun ein Datensatz („Report“ genannt) geformt. Hierbei sind mehrere Methoden möglich:
-
- Monopulsverfahren
- Sliding Window
- Centre of Mass
Beim Monopulsverfahren wird von jedem Echosignal ein so genannter Off-Boresight Angle (OBA) gemessen. Dieser Winkel ist die Abweichung der realen Richtung des entdeckten Objektes von der aktuellen mechanischen Antennenposition. Aus der Summe beider Winkel wird die korrekte Seitenwinkelinformation berechnet. Aus nur einem Echosignal können die Koordinaten gemessen werden.
Das Sliding Window Verfahren bildet diese Information aus einer Gruppe von Eingangsimpulsen. Hier wird praktisch aus einer festgelegten Anzahl von Impulsen mit je unterschiedlicher Seitenwinkelinformation ein Mittelwert gebildet.
Das „Centre of Mass“ ist eine mathematisch bessere Methode als das einfache Sliding Window. Es besteht aus der Berechnung eines zentralen Punktes in einer Menge von Koordinaten, die der Hit-Processor generiert hat. Diese Hits (auf Deutsch: „Treffer“) werden erst in der Entfernung und dann im Seitenwinkel zu Gruppen zusammengefasst und ergeben einen statistischen Durchschnitt. Dieser ist dann in der Häufigkeitsverteilung das Zentrum und die Koordinaten dieses Punktes werden dann als Plotkoordinaten festgelegt. Diese Methode bewirkt eine bessere Ausnutzung der Radardaten und ermöglicht eine genauere Positionsbestimmung. Mit dieser Methode kann auch die Gesamtenergie (die Summe aller zu einem Report zusammengefassten Impulse) berechnet und mit dem Report dem Plotprozessor übermittelt werden. Dieser Energieparameter ist ein wichtiges Indiz zur Unterdrückung von Falschzielen.
Blockschaltbild
Aus der eingangs genannten nichteinheitlichen Bezeichnung wird das folgende Blockschaltbild teils insgesamt als Plotextraktor bezeichnet, teils nur die eine Unterbaugruppe. Wenn der Name Plotextraktor für das Gesamtsystem verwendet wird, dann erhält die Unterbaugruppe den Namen Hit-Prozessor.

Nach dem Empfängerausgang liegt das Echosignal noch als Zwischenfrequenz (IF) vor. Dieses Signal enthält sowohl eine Amplituden- als auch eine Phaseninformation. Mit einem I&Q-Phasendetektor werden beide Informationen in bipolare Videos (ständig die Polarisation ändernde Videosignale) verarbeitet, aus denen dann ein unipolares Video berechnet wird. Im Detektor werden nur die Signale weiterverarbeitet, die einen bestimmten Schwellwert (Threshold) übersteigen. Mit diesem Schwellwert werden wichtige Parameter, wie die Entdeckungswahrscheinlichkeit und die Falschalarmrate festgelegt.
Die Unterbaugruppe Plotextraktor (Hit-Processor) verarbeitet die Reports (Datensätze noch ohne Seitenwinkelinformation) zu den Plots (Datensätze mit Seitenwinkelinformation). Der Sensor Tracker bildet aus mehreren Plots den Track. Dessen Datensatz enthält auch Informationen wie Flugrichtung (Kurs) und Fluggeschwindigkeit.
Datenweiterleitung
Um diese Informationen auch auf weit entfernten Arbeitsplätzen anzeigen zu können, sind die Datenformate standardisiert (zum Beispiel das All Purpose Structured Eurocontrol Surveillance Information Exchange von Eurocontrol). Diese Radardaten werden in einer weiteren Baugruppe, Combiner genannt, mit den Daten vom lokalen Sekundärradar sowie von anderen Primärradargeräten korreliert. Korrelieren heißt, offensichtlich gleiche Informationen, die sich möglicherweise minimal unterscheiden, werden zu einem Datensatz verknüpft. Diese Unterschiede entstehen zum Beispiel, weil sich die Radargeräte ja nicht synchron drehen und somit bis zu 30 Sekunden Flugzeit vergehen können, ehe das zweite Radar das gleiche Flugzeug erfasst.
Da nun die Koordinaten wegen der Verarbeitungszeit nicht mehr in Echtzeit vorliegen und auch nicht mehr von einer konstanten Verarbeitungsdauer ausgegangen werden kann, muss spätestens ab jetzt mit einem Zeitstempel gearbeitet werden. Jeder Datensatz enthält also die genaue Zeit, zu der das Echosignal vom Radargerät empfangen wurde.
Die Verbindung verschiedener Radargeräte und die Anzeiger von deren Daten auf einem gemeinsamen Sichtgerät wird über ein Netzwerk mit dem Namen RADNET organisiert, von der es auch eine militärische Variante „milRADNET“ gibt. Speziell für die Abfrage des Mode-S gibt es auch das Netzwerk RAMOS
Quelle
- www.radartutorial.eu Kapitel Radarsignalverarbeitung
Kategorie:- Radarbaugruppe
-
Wikimedia Foundation.