- RCC-Modul
-
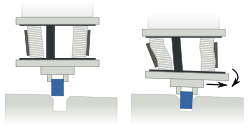 Ein Remote Center of Compliance gibt bei einem Einfügevorgang translatorischen und rotatorischen Abweichungen nach.
Ein Remote Center of Compliance gibt bei einem Einfügevorgang translatorischen und rotatorischen Abweichungen nach.Ein Remote Center of Compliance (auch RCC, engl., frei übersetzt: „entferntes Zentrum der Nachgiebigkeit“) ist eine Fügehilfe in der Roboterindustrie. Ein RCC-Modul ist eine Einheit, welche es (einem Industrieroboter) erlaubt, kleine Positions- und Winkelungenauigkeiten auszugleichen. Diese Fähigkeit des Nachgebens bekommt es durch die Verwendung von Elastomeren.
Mit solchen Fügehilfen können Positionsungenauigkeiten von ca. +-1mm und Winkelungenauigkeiten von ca. +- 1° ausgeglichen werden. (Diese Werte sind als Richtwerte zu verstehen. Absolute Werte solcher Module sind der Artikelbeschreibung der einzelnen Hersteller zu entnehmen.)
Anwendung
Ein typisches Anwendungsgebiet ist ein Einfügevorgang von Bolzen in Bohrungen. Ein Roboter bewegt seinen Greifer, mit dem er den leicht angespitzten Bolzen hält, wie in nebenstehender Abbildung zu sehen über ein leicht gesenktes Loch, in das der Bolzen eingefügt werden soll. Wurde die Einfügeposition nicht zu 100% erreicht, kann der Bolzen trotzdem gerade in das Loch eingeführt werden, ohne dass sich der Bolzen verkantet, da das RCC-Modul die Ungenauigkeit ausgleicht.
Weblinks
- http://www.ristec.com/define-remote.htm – Erklärung von RCC Modulen (engl.)

Wikimedia Foundation.