- Greifsystem
-
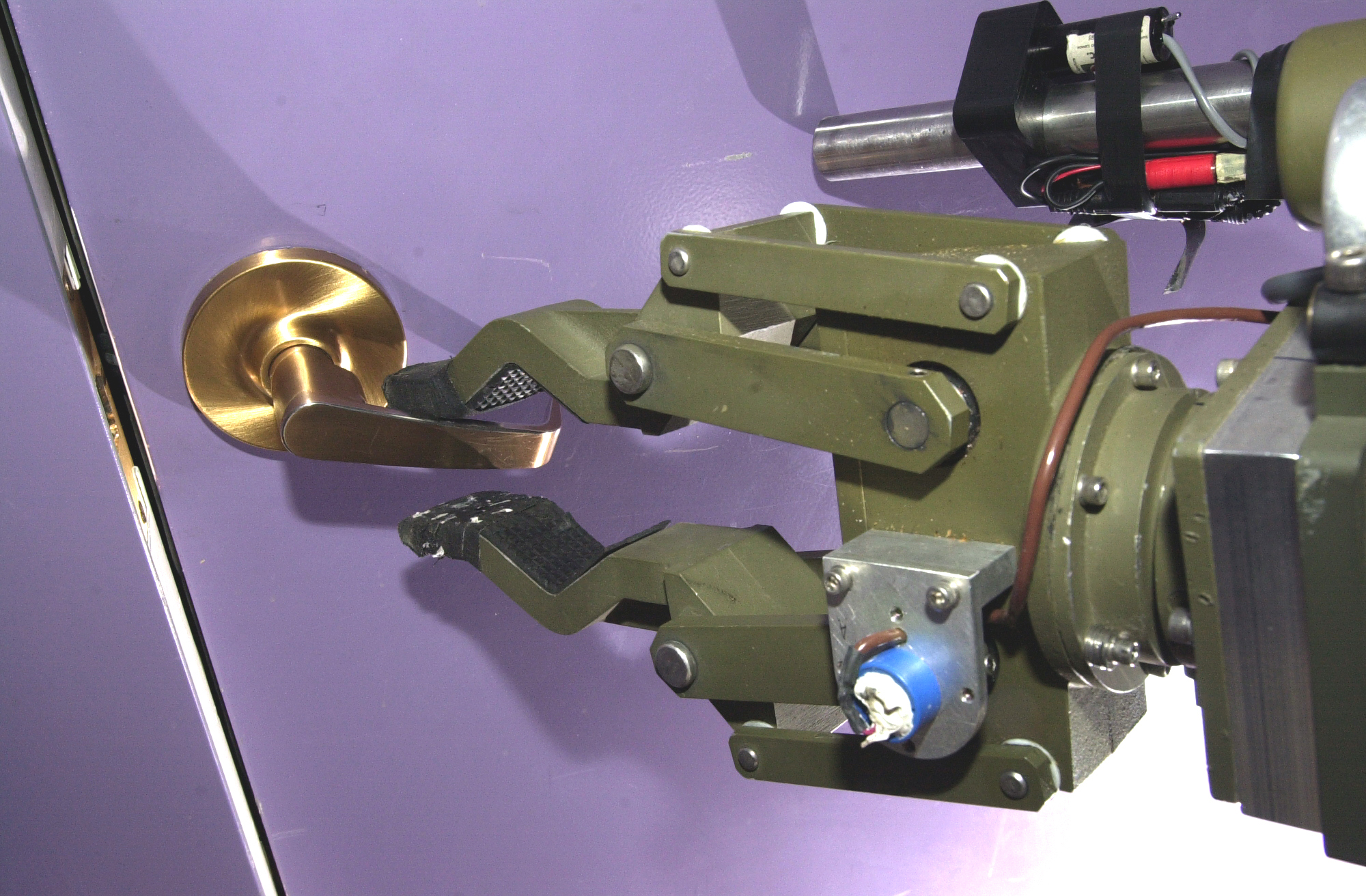
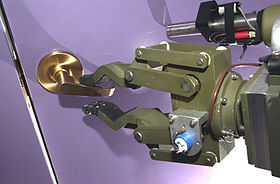 Greifer eines Roboters, eingesetzt zum Öffnen einer Tür
Greifer eines Roboters, eingesetzt zum Öffnen einer Tür
Der Begriff Greifsystem beschreibt die Arbeitsorgane eines Roboters. Dazu zählen Aktoren/Effektoren, aber auch erforderliche Hilfseinrichtungen, wie Handgelenkachsen, Wechselsysteme, Fügehilfen, Schutzeinrichtungen und Sensoreinheiten.
Inhaltsverzeichnis
Greifer
Greifen ist eine Grundbewegung zum Erfassen und Halten und stellt die Verbindung zwischen Roboter und Werkstück her. Ausschlag für eine sichere Verbindung sind dabei die Art der Wirkpaarung und die Anzahl der Kontaktebenen. Die Wirkpaarung kann über Kraft-, Form- oder Stoffpaarung erzielt werden. Beim Einsatz einer Kraftpaarung wird der Halt durch das Ausüben eines Druckes auf die Werkstückoberfläche erzeugt. Im Gegensatz dazu erfolgt bei der Formpaarung das Halten über eine formgleiche Umschließung des Werkstücks. Dabei sind bei sicherer Führung die übertragenen Klemmkräfte sehr klein. Bei einer Stoffpaarung erfolgt der Kontakt mit dem Werkstück über die Ausnutzung der Adhäsion. Dieses Verfahren wird bisher von der Industrie in geringem Maße genutzt, wobei sich hier speziell bei der Mikromontage eine Änderung abzeichnet.
Des Weiteren lassen sich die Greifsysteme nach ihrer Wirkung in
- mechanische
- pneumatische
- magnetische
- adhäsive
Systeme unterteilen. Diese Wirkungen können zur größeren Flexibilität des Greifsystems auch kombiniert eingesetzt werden. Eine wissenschaftliche Einteilung in Form eines Konstruktionskatalogs wurde vom Institut für Konstruktionstechnik (IK, Braunschweig) und dem Institut für Werkzeugmaschinen und Fertigungstechnik (IWF, Braunschweig) gefunden. Zu finden ist er unter [1].
Mechanische Greifer gibt es als Einfinger-, Zweifinger- oder Mehrfingergreifer in starrer, starr-gelenkiger oder elastischer Ausführung. Der Antrieb des mechanischen Greifers erfolgt mechanisch, pneumatisch oder elektrisch. Durch seine einfache Handhabung ist der pneumatische Antrieb sehr verbreitet. Durch ihre universelle Einsetzbarkeit dient die menschliche Hand oft als Vorbild für mechanische Greifer.
Pneumatische Greifer arbeitet über die Aufnahme ebenflächiger Teile im Saugprinzip oder über das Klemmen des Werkstücks im Druckprinzip. Beim Einsatz eines Saugers muss die Oberfläche des Werkstücks glatt, sauber, trocken und luftundurchlässig sein.
Magnetische Greifer unterscheidet man in Permanent- und Elektromagnetgreifer. Permanentmagnetgreifer sind sehr einfach gebaut, benötigen aber Zusatzeinrichtungen zum Abstreifen des Werkstücks. Bei Elektromagnetgreifern erfolgen die Aufnahme und die Abgabe über das Zu- und Abschalten der elektrischen Energie. Beim Einsatz von Magnetgreifern besteht die Gefahr das mehrere Werkstücke gegriffen werden.
Greifer können auch nach ihrer Bauart unterteilt werden. Dazu zählen
- Parallel-,
- Radial-,
- Winkel-,
- Dreipunkt- oder
- Sauggreifer.
Anthropomorphe Greifer
 Eine Roboterhand
Eine RoboterhandNeuartige Antriebsprinzipien wie flexible Fluidaktoren erlauben die Entwicklung leichter und vielgliedriger anthropomorpher Greifer, deren Aussehen, Größe und Funktion der menschlichen Hand sehr nahe kommen. Damit sollen in einer unstrukturierten und unvorhersehbaren Umgebung flexible Greif- und Manipulationsaufgaben wahrgenommen werden. Ihre Einsatzgebiete sind sowohl Handprothesen als auch humanoide Serviceroboter.
Ein Beispiel herfür ist die Anthropomorphe Hand ,die in einer Studie des Deutschen Zentrums für Luft- und Raumfahrt (DLR) gemeinsam mit dem Harbin Institute of Technology (HIT) und dem Werkzeugbauunternehmen Schunk entwickelt wurde.
Werkzeuge
Roboterwerkzeuge sind Montage- oder Bearbeitungswerkzeuge. Dazu zählen u.a. Schleifmaschinen, Schrauber, Bohrspindeln, Klebepistolen, Farbspritzpistolen oder Schweißzangen.
Messzeuge
Messzeuge sind Sensoren, die eine physikalische oder chemische Größe in ein eindeutiges verwertbares, oft elektrisches, Signal umwandeln. Zu den Messzeugen am Greifsystem eines Roboters gehören u.a.
- Dehnungsmessstreifen (DMS),
- Inkrementalgeber,
- Beschleunigungssensoren,
- Bildverarbeitungssysteme (BVS) und
- Nährungsschalter.
Sie helfen dem Roboter bei der Erkennung der richtigen Lage und der Anwesenheit des Werkstücks, bei der Kontrolle der korrekten Bearbeitung des Werkstücks oder bei der Prüfung der entsprechenden Bearbeitungsparameter.
siehe auch:Sensor
Fügehilfen
Fügehilfen nutzt der Roboter zum lagerichtigen Einbau von Werkstücken und beim Wechseln eigener Werkzeugen. Durch Formelemente und Führungen erfolgt eine toleranzarme reproduzierbare Anfahrt bestimmter festgelegter Positionen im Arbeitsraum.
siehe auch:RCC-Modul
Wechselsysteme
Wechselsysteme helfen bei der flexiblen Nutzung von Industrierobotern. Sie bestehen aus Ober- und Unterteil und müssen reproduzierbar gekoppelt sein. Dabei muss neben der mechanischen Verbindung auch der Informations- und der Energiefluss gekoppelt werden. Zu diesem Zweck dienen Formelemente für Grob- und Feinzentrierung, Verrieglungselemente, Steckverbinder und Medienanschlüsse. Durch ein Wechselsystem kann der IR verschiedene Effektoren zur Erfüllung seiner Aufgaben nutzen.
Begriffe und charakteristische Eigenschaften sind in der DIN V 24603/ISO 11593 festgelegt.
siehe auch:Werkzeugwechselsystem
Schutzeinrichtungen
Schutzeinrichtungen sollen Beschädigungen des IR verhindern. Dazu zählen Beschädigungen durch Kollision und Überlastung. Dabei kommen Sollbruchstellen, Rastkupplungen und Abschaltsicherungen zum Einsatz. Erreicht werden sollen
- eine schnelle, verzögerungsarme Abschaltreaktion
- eine einstellbare Ansprechempfindlichkeit in möglichst viele Richtungen
- eine Reproduzierbarkeit der Bewegungen nach Ansprechen der Schutzeinrichtung ohne Neuprogrammierung
- eine geringe Eigenmasse und
- eine einfache steuerungstechnische Einbindung

Wikimedia Foundation.