- Schraube (Mechanik)
-
Die Schraube (engl. screw, franz. torseur) ist ein hauptsächlich in der Mechanik der starren Körper verwendetes Konzept, das der Modellierung von mechanischen Aktionen, Geschwindigkeiten und anderer Größen dient. Auf dem Begriff der Schraube basiert die Schraubentheorie zur Beschreibung statischer und kinematischer Systeme.
Die Schraubentheorie wurde erstmals 1876 vom irischen Astronom und Mathematiker Sir Robert Stawell Ball veröffentlicht. Nachdem sie lange Zeit wenig beachtet wurde, findet sie inzwischen wieder häufiger Verwendung[1], zum Beispiel in der Robotik.[2][3] In Frankreich wurde die Schraubentheorie von Paul Appell aufgegriffen[4], wo sie zusammen mit einer etablierten Notation seit langem die Basis des Hochschulunterrichts der Mechanik bildet. An nichtfranzösischen Universitäten wird die Mechanik nur sehr selten nach der Schraubentheorie gelehrt.[5]
Inhaltsverzeichnis
Schrauben erster Art
Die Gesamtheit der Geschwindigkeitsvektoren aller Punkte eines Körpers (ein Vektorfeld) lässt sich nach Wahl eines Bezugspunktes durch einen Rotationsvektor
 und einen Translationsvektor
und einen Translationsvektor  (Einheit m/s) beschreiben. Der Rotationsvektor ist entlang der Rotationsachse ausgerichtet und besitzt eine Länge, die der Rotationsgeschwindigkeit um diese Achse (Einheit rad/s) entspricht.
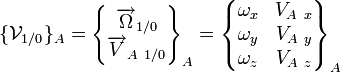
(Einheit m/s) beschreiben. Der Rotationsvektor ist entlang der Rotationsachse ausgerichtet und besitzt eine Länge, die der Rotationsgeschwindigkeit um diese Achse (Einheit rad/s) entspricht.Diese beiden Größen werden in einer Schraube erster Art (engl. twist, franz. torseur cinématique) zusammengefasst; die Bezeichnung geht auf Felix Klein zurück.[6] Eine am Punkt A eines Körpers S definierte Schraube erster Art lässt sich demnach in einem Bezugssystem R durch sechs skalare Größen ausdrücken:
 .
.
Für einen Körper 1, der sich relativ zum Körper 0 bewegt, schreibt man:
 .
.
Eigenschaften
- Eine am Punkt A eines Körpers S in einem Bezugssystem R definierte Schraube besitzt an einem Punkt B den Wert:
 .
.
- Die Summe zweier am gleichen Punkt ausgedrückten Schrauben erster Art ist die aus der Summe der jeweiligen Rotations- und Translationsvektoren zusammengesetzten Schraube.
- Verkettung von Schrauben erster Art:

- Für die Translationsgeschwindigkeiten an zwei verschiedenen Punkten A und B eines gleichen Körpers gilt
 ; diese Eigenschaft wird als Équiprojectivité bezeichnet.
; diese Eigenschaft wird als Équiprojectivité bezeichnet.
Resultate
Die Bewegung zweier durch ein mechanisches Gelenk verbundenen Bauteile lässt sich durch eine Schraube erster Art beschreiben. Die erlaubten Bewegungen hängen vom Typ des Gelenks ab, das sich durch eine Schraube erster Art charakterisieren lässt. Für ein entlang der z-Achse ausgerichtetes Drehgelenk lautet die Schraube der erlaubten Bewegungen beispielsweise:
 .
.
Anschaulich gesprochen bedeutet dies, dass die einzige mögliche relative Bewegung zweier derartig verbundener Bauteile eine Rotation um die z-Achse ist.
Schrauben zweiter Art (Dynamen)
Es lässt sich zeigen, dass sich jedes Kräftesystem nach Wahl eines Bezugspunktes durch ein statisch äquivalentes Paar aus Resultierende
 (Einheit N, Newton) und Drehmoment
(Einheit N, Newton) und Drehmoment  (Einheit Nm, Newton-Meter) beschreiben lässt. Dieses Paar wird Schraube zweiter Art, Dyname, Kraftschraube oder Kraftwinder genannt (engl. wrench, franz. torseur statique).
(Einheit Nm, Newton-Meter) beschreiben lässt. Dieses Paar wird Schraube zweiter Art, Dyname, Kraftschraube oder Kraftwinder genannt (engl. wrench, franz. torseur statique).Eine am Punkt A definierte räumliche Dyname lässt sich demnach durch sechs skalare Größen ausdrücken:
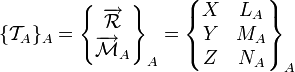 .
.
Für die Aktion, die ein Körper 1 auf einen Körper 2 am Punkt A ausübt, schreibt man:
 .
.
Eigenschaften
Eine Dyname besitzt ähnliche Eigenschaften wie eine Schraube erster Art:
- Das Drehmoment einer am Punkt A definierten Dyname hat am Punkt B den Wert
 .
. - Die Summe zweier am gleichen Punkt ausgedrückten Dynamen ist die aus der Summe der jeweiligen Resultierenden und Momente zusammengesetzten Dyname.
- Ein Kräftepaar ist eine Dyname, deren Resultante der Nullvektor ist.
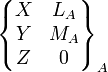
- Eine Dyname, deren Moment der Nullvektor ist, wird als Glisseur bezeichnet.
- Für die Momente einer Dyname an zwei verschiedenen Punkten A und B gilt
 (Équiprojectivité).
(Équiprojectivité).
Resultate
Wenn n durch am gleichen Punkt I definierte Dynamen beschriebene Aktionen auf einen Körper S einwirken, so besagt die Gleichgewichtsbedingung, dass die Summe aller Dynamen die Nulldyname ergibt:
Ein Körper kann am Berührungspunkt nur dann eine Kraft an einen anderen Körper weitergeben, falls eine gegenseitige Bewegung verhindert wird. Für das Beispiel des entlang der z-Achse ausgerichteten Drehgelenks lautet die Dyname der übertragbaren Aktionen:
Literatur
- Pierre Agati u. a.: Mécanique du solide : applications industrielles. Dunod, Paris 2003, ISBN 2-10-007945-X
- Robert Stawell Ball: A Treatise on the Theory of Screws. Cambridge University Press, Cambridge 1998, ISBN 0-521-63650-7 (Online bei Google Books)
- Jean-Louis Fanchon: Guide de mécanique. Nathan, Paris 2008, ISBN 978-2-09-160711-5
Einzelnachweise
- ↑ H. Lipkin, J. Duffy: Sir Robert Stawell Ball and Methodologies of Modern Screw Theory. Proceedings of the Institution of Mechanical Engineers, Part C: Journal of Mechanical Engineering Science 216, 1 (2002), ISSN 0954-4062
- ↑ Joseph Davidson, Kenneth Hunt: Robots and Screw Theory: Applications of Kinematics and Statics to Robotics. Oxford University Press, Oxford 2004, ISBN 0-19-856245-4
- ↑ Stefano Stramigioli and Herman Bruyninckx: Geometry and Screw Theory for Robotics. IEEE/RSJ International Conference on Robotics and Automation (ICRA) Tutorial (PDF, 850 KB)
- ↑ Paul Émile Appell: Traité de mécanique rationnelle. Gauthier-Villars, Paris 1932 (Online bei Gallica)
- ↑ Paul Germain u. a.: Continuum Thermomechanics: The Art and Science of Modelling Material Behaviour, S. 15. Kluwer Academic Publishers, Dordrecht 2000, ISBN 0-7923-6407-4
- ↑ Felix Klein: Zur Schraubentheorie von Sir Robert Ball. In Felix Klein: Gesammelte mathematische Abhandlungen. Bd. 1, S. 503–532. Springer-Verlag, Berlin 1921, ISBN 3-540-05852-4 (Online bei Gallica)

Wikimedia Foundation.