- Totale Differenzierbarkeit
-
Die Differential- bzw. Differenzialrechnung ist ein Gebiet der Mathematik und ein wesentlicher Bestandteil der Analysis. Sie ist eng verwandt mit der Integralrechnung, mit der sie unter der Bezeichnung Infinitesimalrechnung zusammengefasst wird. Zentrales Thema der Differentialrechnung ist die Berechnung lokaler Veränderungen von Funktionen.
Hierzu dient die Ableitung (auch Differentialquotient genannt), deren geometrische Entsprechung die Tangentensteigung ist. Die Ableitung ist (nach der Vorstellung von Leibniz) der Proportionalitätsfaktor zwischen verschwindend kleinen (infinitesimalen) Änderungen des Eingabewertes und den daraus resultierenden, ebenfalls infinitesimalen Änderungen des Funktionswertes. Existiert ein solcher Proportionalitätsfaktor, so nennt man die Funktion differenzierbar. Äquivalent wird die Ableitung in einem Punkt als diejenige lineare Abbildung definiert, die unter allen linearen Abbildungen die Änderung der Funktion lokal am besten approximiert. Entsprechend wird die Ableitung auch die Linearisierung der Funktion genannt.
In vielen Fällen ist die Differentialrechnung zur Bildung von mathematischen Modellen, die versuchen die Wirklichkeit abzubilden, sowie deren nachfolgende Analyse ein unverzichtbares Hilfsmittel. Die Entsprechung der Ableitung im untersuchten Sachverhalt ist häufig die momentane Änderungsrate; in den Wirtschaftswissenschaften spricht man auch häufig von Grenzraten (z. B. Grenzkosten, Grenzproduktivität eines Produktionsfaktors etc.).
Dieser Artikel erklärt außerdem die mathematischen Begriffe: Differenzenquotient, Differentialquotient, Differentiation, stetig differenzierbar, glatt, partielle Ableitung, totale Ableitung, Reduktion des Grades eines Polynoms.
Einleitung
Der Grundbegriff der Differentialrechnung ist die Ableitung einer Funktion.
In geometrischer Sprache ist die Ableitung eine verallgemeinerte Steigung. Der geometrische Begriff Steigung ist ursprünglich nur für lineare Funktionen definiert, deren Funktionsgraph eine Gerade ist. Die Ableitung einer beliebigen Funktion an einer Stelle x0 definiert man als die Steigung der Tangenten im Punkt (x0;f(x0)) des Graphen von f.
In arithmetischer Sprache gibt die Ableitung einer Funktion f für jedes x an, wie groß der lineare Anteil der Änderung von f(x) ist (die Änderung 1. Ordnung), wenn sich x um einen beliebig kleinen Betrag Δx ändert. Für die exakte Formulierung dieses Sachverhalts wird der Begriff Grenzwert (oder Limes) verwendet.
In einer klassischen physikalischen Anwendung liefert die Ableitung der Orts- oder Weg-Zeit-Funktion nach der Zeit die Momentangeschwindigkeit eines Teilchens.
Geschichte
 Gottfried Wilhelm Leibniz
Gottfried Wilhelm Leibniz Isaac Newton
Isaac NewtonDie Aufgabenstellung der Differentialrechnung war als Tangentenproblem seit der Antike bekannt. Der nahe liegende Lösungsansatz war die Approximation der Tangente als Sekante über einem endlichen (endlich heißt hier: größer als null), aber beliebig kleinen Intervall. Die technische Schwierigkeit bestand darin, mit einer solchen infinitesimal kleinen Intervallbreite zu rechnen. So löste Pierre de Fermat um 1640 das Tangentenproblem für Polynome. Hierbei schrieb er bereits eine Ableitung hin, jedoch ohne Betrachtung von Grenzwerten und ohne niederzuschreiben, was die mathematischen Rechtfertigungen für sein Vorgehen waren. Zur selben Zeit wählte René Descartes einen algebraischen Zugang, indem er an eine Kurve einen Kreis anlegte. Dieser schneidet die Kurve in zwei Punkten, es sei denn, der Kreis berührt die Kurve. Dann war es ihm für spezielle Kurven möglich, die Steigung der Tangente zu bestimmen.
Ende des 17. Jahrhunderts gelang es Isaac Newton und Gottfried Wilhelm Leibniz unabhängig voneinander, widerspruchsfrei funktionierende Kalküle zu entwickeln (zur Entdeckungsgeschichte und zum Prioritätsstreit siehe den Artikel Infinitesimalrechnung). Newton ging das Problem jedoch von einer anderen Seite an als Leibniz. Während Newton das Problem physikalisch über das Momentangeschwindigkeitsproblem anging, versuchte es Leibniz geometrisch über das Tangentenproblem. Ihre Arbeiten erlaubten das Abstrahieren von rein geometrischer Vorstellung und werden deshalb als Beginn der Analysis betrachtet. Bekannt wurden sie vor allem durch das Buch des Adligen Guillaume François Antoine, Marquis de L’Hospital, der bei Johann Bernoulli Privatunterricht nahm und dessen Forschung zur Analysis so publizierte. Die heute bekannten Ableitungsregeln basieren vor allem auf den Werken von Leonhard Euler, der den Funktionsbegriff prägte. Newton und Leibniz arbeiteten mit beliebig kleinen Zahlen, die aber größer als null sind. Dies wurde bereits von Zeitgenossen als unlogisch kritisiert, beispielsweise von Bischof Berkeley in der polemischen Schrift The analyst: or a discourse addressed to an infidel mathematician. Die Differentialrechnung wurde aber trotz herrschender Unsicherheit konsequent weiterentwickelt; in erster Linie wegen ihrer zahlreichen Anwendungen in der Physik und in anderen Gebieten der Mathematik. Symptomatisch für die damalige Zeit war das von der Preußischen Akademie der Wissenschaften 1784 veröffentlichte Preisausschreiben:
„… Die höhere Geometrie benutzt häufig unendlich große und unendlich kleine Größen; jedoch haben die alten Gelehrten das Unendliche sorgfältig vermieden, und einige berühmte Analysten unserer Zeit bekennen, dass die Wörter unendliche Größe widerspruchsvoll sind. Die Akademie verlangt also, dass man erkläre, wie aus einer widersprechenden Annahme so viele richtige Sätze entstanden sind, und dass man einen sicheren und klaren Grundbegriff angebe, welcher das Unendliche ersetzen dürfte, ohne die Rechnung zu schwierig oder zu lang zu machen …“
Erst zum Anfang des 19. Jahrhunderts gelang es Augustin Louis Cauchy, der Differentialrechnung die heute übliche logische Strenge zu geben, indem er von den infinitesimalen Größen abging und die Ableitung als Grenzwert von Sekantensteigungen („Differenzenquotienten“) definierte. Die heute benutzte Definition des Grenzwerts wurde schließlich von Karl Weierstraß Ende des 19. Jahrhunderts formuliert.
Definition
Einführung
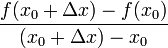
Ausgangspunkt für die Definition der Ableitung ist die Näherung der Tangentensteigung durch eine Sekantensteigung (manchmal auch Sehnensteigung genannt). Gesucht sei die Steigung einer Funktion f in einem Punkt
 . Man berechnet zunächst die Steigung der Sekante an f über einem endlichen Intervall:
. Man berechnet zunächst die Steigung der Sekante an f über einem endlichen Intervall:- Sekantensteigung =
 .
.
Die Sekantensteigung ist also der Quotient zweier Differenzen; sie wird deshalb auch Differenzenquotient genannt. Mit der Kurznotation Δy für f(x0 + Δx) − f(x0) kann man die Sekantensteigung abgekürzt als
 schreiben.
schreiben.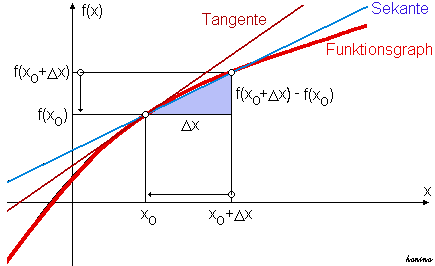
Differenzenquotienten sind aus dem täglichen Leben wohlbekannt, zum Beispiel als Durchschnittsgeschwindigkeit:
- „Auf der Fahrt von Augsburg nach Flensburg war ich um 9:43 Uhr (x0) am Kreuz Biebelried (Tageskilometerstand f(x0) = 198 km). Um 11:04 Uhr (x0 + Δx) war ich am Dreieck Hattenbach (Tageskilometerstand f(x0 + Δx)=341 km). In 1 Stunde und 21 Minuten (Δx) habe ich somit 143 km (Δy) zurückgelegt. Meine Durchschnittsgeschwindigkeit auf dieser Teilstrecke betrug somit 143 km/1,35 h = 106 km/h (Δy / Δx).“
Um eine Tangentensteigung (im genannten Anwendungsbeispiel also eine Momentangeschwindigkeit) zu berechnen, muss man die beiden Punkte, durch die die Sekante gezogen wird, immer weiter aneinander rücken. Dabei gehen sowohl Δx als auch Δy gegen Null. Der Quotient Δy / Δx bleibt aber im Normalfall endlich. Auf diesem Grenzübergang beruht die folgende Definition:
Differenzierbarkeit und Ableitung in einem Punkt: Formale Definition und Notation
→ Hauptartikel: Differenzierbarkeit
Eine Funktion, die ein offenes Intervall U in die reellen Zahlen abbildet (
 ), heißt differenzierbar an der Stelle
), heißt differenzierbar an der Stelle  , falls der Grenzwert
, falls der Grenzwert (mit h = x − x0)
(mit h = x − x0)
existiert. Dieser Grenzwert heißt Differentialquotient oder Ableitung von f nach x an der Stelle x0 und wird als
 oder
oder  oder
oder  oder
oder  notiert
notiert
(gesprochen: „f Strich“, „d f von x nach d x an der Stelle x gleich x null“, „d f nach d x von x null“ respektive „d nach d x von f von x null“).
Die Terme df und dx werden als Differentiale bezeichnet, haben aber in der modernen Analysis (zumindest bis zu diesem Punkt der Theorie) lediglich symbolische Bedeutung und sind bisher nur in dieser Schreibweise des formal notierten Differentialquotienten erlaubt. In manchen Anwendungen (Kettenregel, Integration mancher Differentialgleichungen, Integration durch Substitution) rechnet man mit ihnen fast wie mit „normalen“ Variablen. Die präzise formale Begründung hierfür liefert die Theorie der Differentialformen. Ein Differential ist auch Teil der üblichen Notation für Integrale.
Die Notation einer Ableitung als Quotient zweier Differentiale wurde von Leibniz eingeführt. Newton benutzte einen Punkt über der abzuleitenden Größe, was in der Physik für Zeitableitungen bis heute üblich geblieben ist (
 , sprich: „x Punkt“). Die Notation mit Strich (
, sprich: „x Punkt“). Die Notation mit Strich ( ) geht auf Joseph-Louis Lagrange zurück, der sie 1797 in seinem Buch Théorie des fonctions analytiques einführte.
) geht auf Joseph-Louis Lagrange zurück, der sie 1797 in seinem Buch Théorie des fonctions analytiques einführte.Im Laufe der Zeit wurde folgende gleichwertige Definition gefunden, die sich im allgemeineren Kontext komplexer oder mehrdimensionaler Funktionen als leistungsfähiger erwiesen hat:
Eine Funktion heißt in einem Punkt x0 differenzierbar, falls eine Konstante L existiert, so dass
Der Zuwachs der Funktion f, wenn man sich von x0 nur wenig entfernt, etwa um den Wert h, lässt sich also durch Lh sehr gut approximieren, man nennt die lineare Funktion g mit g(x0 + h) = f(x0) + Lh deswegen auch die Linearisierung von f an der Stelle x0.
Eine weitere Definition ist: Es gibt eine an x0 stetige Funktion r mit r(x0) = 0 und eine Konstante L, für die gilt
 .
.
Dabei ist der Limes des „Restgliedes“ r(h) für h gegen x0 gleich null.
Der Vorteil dieser Formulierung ist, dass Beweise einfacher zu führen sind, da kein Quotient betrachtet werden muss. Diese Darstellung der besten linearen Approximation wurde schon von Weierstraß, Henri Cartan und Jean Dieudonné konsequent angewandt.
Bezeichnet man eine Funktion als differenzierbar, ohne sich auf eine bestimmte Stelle zu beziehen, dann bedeutet dies die Differenzierbarkeit an jeder Stelle des Definitionsbereiches, also die Existenz einer eindeutigen Tangente für jeden Punkt des Graphen.
Eine differenzierbare Funktion ist immer stetig, die Umkehrung gilt jedoch nicht. Noch Anfang des 19. Jahrhunderts war man überzeugt, dass eine stetige Funktion höchstens an wenigen Stellen nicht differenzierbar sein könne (wie die Betragsfunktion). Bernard Bolzano konstruierte dann als erster Mathematiker tatsächlich eine Funktion, die überall stetig, aber nirgends differenzierbar ist, was in der Fachwelt allerdings nicht bekannt wurde; Karl Weierstraß fand dann in den 1860er Jahren ebenfalls eine derartige Funktion, was diesmal unter Mathematikern Wellen schlug. Ein bekanntes Beispiel für eine stetige, nicht differenzierbare Funktion ist die von Helge von Koch 1904 vorgestellte Koch-Kurve.
Ableitung als eine Funktion
Die Ableitung der Funktion f an der Stelle x0, bezeichnet mit
 , beschreibt lokal das Verhalten der Funktion in der Umgebung der betrachteten Stelle x0. Nun wird x0 im Allgemeinen nicht die einzige Stelle sein, an der f differenzierbar ist. Man kann daher versuchen, jeder Zahl x aus dem Definitionsbereich von f die Ableitung an dieser Stelle (also
, beschreibt lokal das Verhalten der Funktion in der Umgebung der betrachteten Stelle x0. Nun wird x0 im Allgemeinen nicht die einzige Stelle sein, an der f differenzierbar ist. Man kann daher versuchen, jeder Zahl x aus dem Definitionsbereich von f die Ableitung an dieser Stelle (also  ) zuzuordnen. Auf diese Weise erhält man eine neue Funktion
) zuzuordnen. Auf diese Weise erhält man eine neue Funktion  , deren Definitionsbereich eine Teilmenge des Definitionsbereiches von f ist. heißt die Ableitungsfunktion oder kurz die Ableitung von f. Beispielsweise hat die Quadratfunktion
, deren Definitionsbereich eine Teilmenge des Definitionsbereiches von f ist. heißt die Ableitungsfunktion oder kurz die Ableitung von f. Beispielsweise hat die Quadratfunktion  an einer beliebigen Stelle x0 die Ableitung
an einer beliebigen Stelle x0 die Ableitung  . Daher ist die zugehörige Ableitungsfunktion gegeben durch
. Daher ist die zugehörige Ableitungsfunktion gegeben durch  .
.Die Ableitungsfunktion ist im Normalfall eine andere als die ursprüngliche, einzige Ausnahme ist die Exponentialfunktion ex und ihre Vielfachen.
Ist die Ableitung stetig, dann heißt f stetig differenzierbar. In Anlehnung an die Bezeichnung C(Ω) des Raums der auf der Menge Ω stetigen Funktionen wird der Raum der stetig differenzierbaren Funktionen mit C1(Ω) abgekürzt.
Berechnung von Ableitungen
Das Berechnen der Ableitung einer Funktion wird Differentiation genannt; sprich, man differenziert diese Funktion.
Um die Ableitung elementarer Funktionen (z. B. xn, sin(x),…) zu berechnen, hält man sich eng an die oben angegebene Definition, berechnet explizit einen Differenzenquotienten und lässt dann Δx gegen Null gehen. Allerdings vollzieht der typische Mathematikanwender diese Berechnung nur ein paar wenige Male in seinem Leben nach. Später kennt er die Ableitungen der wichtigsten elementaren Funktionen auswendig und schlägt Ableitungen nicht ganz so geläufiger Funktionen in einem Tabellenwerk (z. B. im Bronstein-Semendjajew oder unserer Tabelle von Ableitungs- und Stammfunktionen) nach.
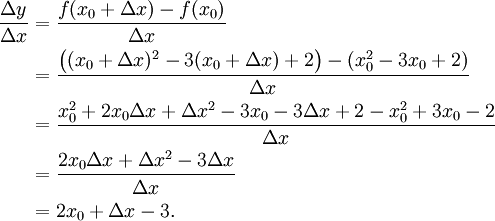
Beispiel für die elementare Berechnung einer Ableitungsfunktion
Gesucht sei die Ableitung von f(x) = x2 − 3x + 2. Dann berechnet man den Differenzenquotienten als
und erhält im Limes
 die Ableitung
die AbleitungBeispiel für eine nicht überall differenzierbare Funktion
f(x) = | x | ist an der Stelle 0 nicht differenzierbar:
Für alle x > 0 gilt nämlich f(x) = x und damit
 .
.
Für alle x < 0 gilt dagegen f(x) = − x und folglich
 .
.
Da der links- und der rechtsseitige Grenzwert nicht übereinstimmen, existiert der Grenzwert nicht. Die Funktion f ist somit an der betrachteten Stelle nicht differenzierbar. Die Differenzierbarkeit der Funktion an allen anderen Stellen ist dagegen noch immer gegeben.
Es existieren an der Stelle 0 jedoch die rechtsseitige Ableitung
und die linksseitige Ableitung
 .
.
Betrachtet man den Graphen von f, so kommt man zu der Erkenntnis, dass der Begriff der Differenzierbarkeit anschaulich bedeutet, dass der zugehörige Graph knickfrei verläuft.
Ein typisches Beispiel für nirgends differenzierbare stetige Funktionen, deren Existenz zunächst schwer vorstellbar erscheint, sind fast alle Pfade der brownschen Bewegung. Diese wird zum Beispiel zur Modellierung der Charts von Aktienkursen benutzt.
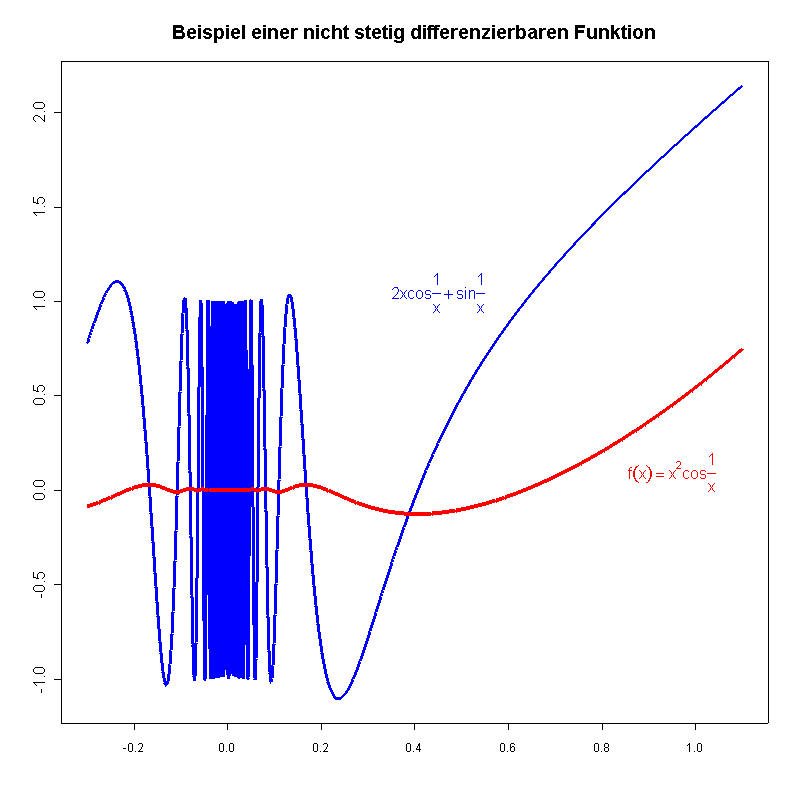
Beispiel für eine nicht überall stetig differenzierbare Funktion
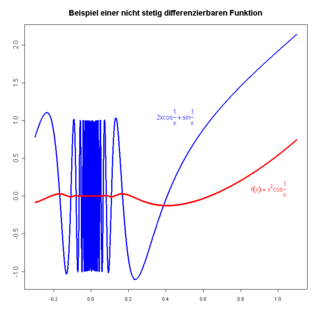 Beispiel einer nicht stetig differenzierbaren Funktion
Beispiel einer nicht stetig differenzierbaren FunktionEine Funktion heißt stetig differenzierbar, wenn ihre Ableitung stetig ist. Selbst wenn eine Funktion überall differenzierbar ist, muss die Ableitung nicht stetig sein. Zum Beispiel ist die Funktion
in jedem Punkt, inklusive x = 0, differenzierbar. Die Ableitung
ist dagegen im Punkt 0 nicht stetig.
Ableitungsregeln
Ableitungen zusammengesetzter Funktionen, z.B. sin(2x) oder
 , führt man mit Hilfe von Ableitungsregeln auf die Differentiation elementarer Funktionen zurück (siehe auch: Tabelle von Ableitungs- und Stammfunktionen).
, führt man mit Hilfe von Ableitungsregeln auf die Differentiation elementarer Funktionen zurück (siehe auch: Tabelle von Ableitungs- und Stammfunktionen).Mit den folgenden Regeln kann man die Ableitung zusammengesetzter Funktionen auf Ableitungen einfacherer Funktionen zurückführen. Seien f, g und h (im Definitionsbereich) differenzierbare, reelle Funktionen, n und a reelle Zahlen, dann gilt:
- Umkehrregel
- Ist f eine an der Stelle x0 differenzierbare, bijektive Funktion mit
 , und ihre Umkehrfunktion f − 1 bei f(x0) differenzierbar, dann gilt:
, und ihre Umkehrfunktion f − 1 bei f(x0) differenzierbar, dann gilt:
-
- Spiegelt man einen Punkt P des Graphen von f an der 1. Mediane und erhält damit P * auf f − 1, so ist die Steigung von f − 1 in P * der Kehrwert der Steigung von f in P
- Logarithmische Ableitung
- Aus der Kettenregel folgt für die Ableitung des natürlichen Logarithmus einer Funktion f:
- Ein Bruch der Form
 wird logarithmische Ableitung genannt.
wird logarithmische Ableitung genannt.
- Ableitung der Potenzfunktion
- Um
 abzuleiten, erinnert man sich, dass Potenzen mit reellen Exponenten auf dem Umweg über die Exponentialfunktion definiert sind:
abzuleiten, erinnert man sich, dass Potenzen mit reellen Exponenten auf dem Umweg über die Exponentialfunktion definiert sind:  . Anwendung der Kettenregel und – für die innere Ableitung – der Produktregel ergibt
. Anwendung der Kettenregel und – für die innere Ableitung – der Produktregel ergibt  .
.
- Leibnizsche Regel
- Die Ableitung n-ter Ordnung für ein Produkt aus zwei n-fach differenzierbaren Funktionen f und g ergibt sich aus
 .
.- Die hier auftretenden Ausdrücke der Form
 sind Binomialkoeffizienten.
sind Binomialkoeffizienten.
- Formel von Faà di Bruno
- Diese Formel ermöglicht die geschlossene Darstellung der n-ten Ableitung der Komposition zweier n-fach differenzierbarer Funktionen. Sie verallgemeinert die Kettenregel auf höhere Ableitungen.
Der Fundamentalsatz der Analysis
Die wesentliche Leistung von Leibniz war die Erkenntnis, dass Integration und Differentiation zusammenhängen. Diese formulierte er im Hauptsatz der Differential- und Integralrechnung, auch Fundamentalsatz der Analysis genannt. Er besagt:
Ist
 ein Intervall,
ein Intervall,  eine stetige Funktion und
eine stetige Funktion und  ein beliebiger Punkt, so ist die Funktion
ein beliebiger Punkt, so ist die Funktionstetig differenzierbar, und ihre Ableitung ist
 .
.Hiermit ist also eine Anleitung zum Integrieren gegeben: Gesucht ist eine Funktion, deren Ableitung der Integrand ist. Dann gilt:
 .
.
Mittelwertsatz der Differentialrechnung
Ein weiterer zentraler Satz der Differentialrechnung ist der Mittelwertsatz, der von Cauchy bewiesen wurde.
Es sei
![f: [a,b] \to \mathbb{R}](/pictures/dewiki/51/332d0f0f6103ad3c4ec22d3af5b36e7c.png) eine Funktion, die auf dem abgeschlossenen Intervall [a,b] (mit a < b) definiert und stetig ist. Außerdem sei die Funktion f im offenen Intervall (a,b) differenzierbar. Unter diesen Voraussetzungen gibt es mindestens ein
eine Funktion, die auf dem abgeschlossenen Intervall [a,b] (mit a < b) definiert und stetig ist. Außerdem sei die Funktion f im offenen Intervall (a,b) differenzierbar. Unter diesen Voraussetzungen gibt es mindestens ein  , sodass
, sodass  gilt.
gilt.Mehrfache Ableitungen
Ist die Ableitung einer Funktion f wiederum differenzierbar, so lässt sich die zweite Ableitung von f als Ableitung der ersten definieren. Auf dieselbe Weise können dann auch dritte, vierte etc. Ableitungen definiert werden. Eine Funktion kann dementsprechend einfach differenzierbar, zweifach differenzierbar etc. sein.
Die zweite Ableitung kann geometrisch als die Krümmung eines Graphen interpretiert werden. Sie hat zahlreiche physikalische Anwendungen. Zum Beispiel ist die erste Ableitung des Orts x(t) nach der Zeit t die Momentangeschwindigkeit, die zweite Ableitung die Beschleunigung. Aus der Physik kommt die Schreibweise
, (Sprich: x Punkt), für Ableitungen einer beliebigen Funktion nach der Zeit.Wenn Politiker sich erfreut über den „Rückgang des Anstiegs der Arbeitslosenzahl“ äußern, dann sprechen sie von der zweiten Ableitung (Änderung des Anstiegs), um die unangenehme Aussage der ersten Ableitung (Anstieg der Arbeitslosenzahl) zu relativieren.
Mehrfache Ableitungen können auf drei verschiedene Weisen geschrieben werden:
oder im physikalischen Fall (bei einer Ableitung nach der Zeit)
Naheliegenderweise wird die Multi-Apostroph-Schreibweise bei niedrigen, die eine oder andere Zahlen-Schreibweise bei hohen Ableitungen bevorzugt. Für die formale Bezeichnung beliebiger Ableitungen f(n) legt man außerdem fest, dass
 und f(0) = f.
und f(0) = f.Taylor-Reihen und Glattheit
Ist f eine (n + 1)-mal stetig differenzierbare Funktion im Intervall I, dann gilt für alle a und x aus I die Darstellung der sogenannten Taylor-Formel:
- f(x) = Tn(x) + Rn + 1(x)
mit dem n-ten Taylorpolynom an der Entwicklungsstelle a
und dem (n + 1)-ten Restglied
Eine beliebig oft differenzierbare Funktion wird glatte Funktion genannt. Da sie alle Ableitungen besitzt, kann die oben angegebene Taylor-Formel erweitert werden auf die Taylor-Reihe von f mit Entwicklungspunkt a
Es stellt sich allerdings heraus, dass die Existenz aller Ableitungen nicht ergibt, dass f sich durch die Taylor-Reihe darstellen lässt. Anders ausgedrückt: Jede analytische Funktion ist glatt, aber nicht umgekehrt, wie das im Artikel Taylorreihe gegebene Beispiel einer nicht analytischen glatten Funktion zeigt.
Häufig findet man in mathematischen Betrachtungen den Begriff hinreichend glatt. Hiermit ist gemeint, dass die Funktion so oft differenzierbar ist, wie nötig um den aktuellen Gedankengang durchzuführen.
Anwendungen
Berechnung von Minima und Maxima
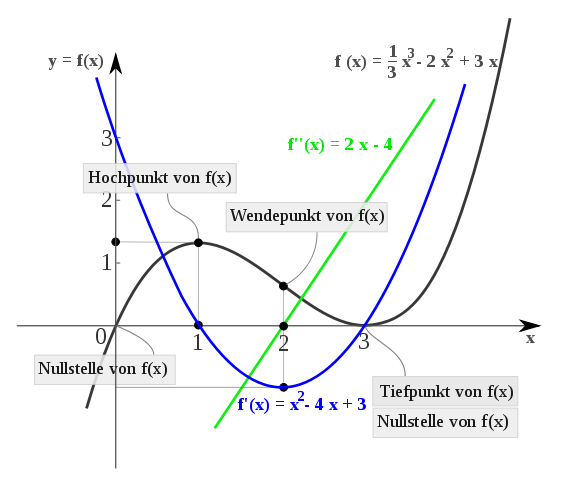
Eine der wichtigsten Anwendungen der Differentialrechnung ist die Bestimmung von Extremwerten, meist zur Optimierung von Prozessen. Diese befinden sich unter anderem bei monotonen Funktionen am Rand des Definitionsbereichs, im Allgemeinen jedoch an den Stellen, wo die Ableitung Null ist. Eine Funktion kann einen Maximal- oder Minimalwert haben, ohne dass die Ableitung an dieser Stelle existiert, im folgenden werden jedoch nur zumindest lokal differenzierbare Funktionen betrachtet. Als Beispiel nehmen wir das Polynom
Die Abbildung zeigt den Verlauf von f(x), f'(x) und f''(x) .
Waagerechte Tangenten
Besitzt eine Funktion
 mit
mit  in einem Punkt ihren größten Wert, gilt also für alle x dieses Intervalls
in einem Punkt ihren größten Wert, gilt also für alle x dieses Intervalls  , und ist f im Punkt x0 differenzierbar, so kann die Ableitung dort nur gleich null sein: f'(x0) = 0. Eine entsprechende Aussage gilt, falls f in x0 den kleinsten Wert annimmt.
, und ist f im Punkt x0 differenzierbar, so kann die Ableitung dort nur gleich null sein: f'(x0) = 0. Eine entsprechende Aussage gilt, falls f in x0 den kleinsten Wert annimmt.Geometrische Deutung dieses Satzes von Fermat ist, dass der Graph der Funktion in lokalen Extrempunkten eine parallel zur x-Achse verlaufende Tangente, auch waagerechte Tangente genannt, besitzt.
Es ist somit für differenzierbare Funktionen eine notwendige Bedingung für das Vorliegen einer Extremstelle, dass die Ableitung an der betreffenden Stelle den Wert 0 annimmt:

Umgekehrt kann daraus, dass die Ableitung an einer Stelle den Wert null hat, noch nicht auf eine Extremstelle geschlossen werden, es könnte auch beispielsweise ein Sattelpunkt vorliegen. Eine Liste verschiedener hinreichender Kriterien, deren Erfüllung sicher auf eine Extremstelle schließen lässt, findet sich im Artikel Extremwert. Diese benutzen meist die zweite oder noch höhere Ableitungen.
Notwendige und hinreichende Bedingung im Beispiel
Im Beispiel ist
Daraus folgt, dass
 genau für x = 1 und x = 3 gilt. Die Funktionswerte an diesen Stellen sind f(1) = 4 / 3 und f(3) = 0, d. h. die Kurve hat in den Punkten
genau für x = 1 und x = 3 gilt. Die Funktionswerte an diesen Stellen sind f(1) = 4 / 3 und f(3) = 0, d. h. die Kurve hat in den Punkten  und
und  waagerechte Tangenten, und nur in diesen.
waagerechte Tangenten, und nur in diesen.Da die Folge
abwechselnd aus kleinen und großen Werten besteht, muss in diesem Bereich ein Hoch- und ein Tiefpunkt liegen. Nach dem Satz von Fermat hat die Kurve in diesen Punkten eine waagerechte Tangente, es kommen also nur die oben ermittelten Punkte in Frage: Also ist
ein Hochpunkt und ein Tiefpunkt.Kurvendiskussion
Mit Hilfe der Ableitungen lassen sich noch weitere Eigenschaften der Funktion analysieren, wie Wendepunkte, Sattelpunkt, Konvexität oder die oben schon angesprochene Monotonie. Die Durchführung dieser Untersuchungen wird im Artikel Kurvendiskussion beschrieben.
Differentialgleichungen
→ Hauptartikel: Differentialgleichung
Eine weitere wichtige Anwendung der Differentialrechnung besteht in der mathematischen Modellierung physikalischer Vorgänge. Wachstum, Bewegung oder Kräfte haben alle mit Ableitungen zu tun, ihre formelhafte Beschreibung muss also Differentiale enthalten. Typischerweise führt dies auf Gleichungen, in denen Ableitungen einer unbekannten Funktion auftauchen, eben genau Differentialgleichungen.
Beispielsweise verknüpft das newtonsche Bewegungsgesetz
die Beschleunigung
 eines Körpers mit seiner Masse m und der auf ihn einwirkenden Kraft
eines Körpers mit seiner Masse m und der auf ihn einwirkenden Kraft  . Das Grundproblem der Mechanik lautet deshalb, aus einer gegebenen Beschleunigung auf die Ortsfunktion eines Körpers zurückzuschließen. Diese Aufgabe, eine Umkehrung der zweifachen Differentiation, hat die mathematische Gestalt einer Differentialgleichung zweiter Ordnung. Die mathematische Schwierigkeit dieses Problems rührt daher, dass Ort, Geschwindigkeit und Beschleunigung Vektoren sind, die im Allgemeinen nicht in die gleiche Richtung zeigen, und dass die Kraft – je nach Anwendungsfall – von der Zeit t oder/und vom Ort
. Das Grundproblem der Mechanik lautet deshalb, aus einer gegebenen Beschleunigung auf die Ortsfunktion eines Körpers zurückzuschließen. Diese Aufgabe, eine Umkehrung der zweifachen Differentiation, hat die mathematische Gestalt einer Differentialgleichung zweiter Ordnung. Die mathematische Schwierigkeit dieses Problems rührt daher, dass Ort, Geschwindigkeit und Beschleunigung Vektoren sind, die im Allgemeinen nicht in die gleiche Richtung zeigen, und dass die Kraft – je nach Anwendungsfall – von der Zeit t oder/und vom Ort  abhängen kann.
abhängen kann.Da viele Modelle mehrdimensional sind, sind bei der Formulierung häufig die weiter unten erklärten partiellen Ableitungen sehr wichtig, mit denen sich partielle Differentialgleichungen formulieren lassen. Mathematisch kompakt werden diese mittels Differentialoperatoren beschrieben und analysiert.
Ein Beispiel für angewandte Differentialrechnung
- Sekantensteigung =






















Wikimedia Foundation.