- Verstärkerlinearisierung
-
Bei Verstärkern bezeichnet die Verstärkerlinearisierung eine Form der Fehlerkorrektur (engl. error correction) die nichtlinearer Verzerrungen durch Messung der Abweichung, die anschließend als Korrektursignale dienen, kompensiert. Dem Übertragungssignal beigemischt erfolgt idealerweise eine vollständige Elimination aller Verzerrungen.
Inhaltsverzeichnis
Grundgedanke
Die Minimierung nichtlinearer Verzerrungen durch Gegenkopplung erfordert eine hohe Kreisverstärkung. Die zunehmende Verstärkung geht mit einer größeren Gefahr der Instabilität des Regelkreises einher und erfordert deswegen schnelle Elektronik. Die Fehlerkorrektur dagegen benötigt lediglich eine Verstärkung von eins für die Messung des Fehlersignals.
Feedforward
 Feedforward
Feedforward
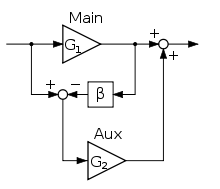
Der Signalflussplan für eine Feedforward-Fehlerkorrektur verdeutlicht das Konzept sehr gut. Die Differenz zwischen Eingangs- und Ausgangssignal vom Übertragungsglied G1 bildet das Korrektursignal. Das Übertragungsglied G2 agiert als Leistungsverstärker für das Korrektursignal. Dem fehlerbehafteten Signal beaufschlagt resultiert ein verzerrungsarmes Ausganganssignal.
Das Glied β macht die Verstärkung des Eingangssignals durch G1 rückgängig, entspricht also dessen Kehrwert. Das Korrektursignal benötigt die gleiche Verstärkung wie das Hauptsignal, daher besitzt G2 den gleich Verstärkungsfaktur wie G1.
Die Voraussetzung G2 = 1/β ermöglicht folgende Umformungen:
Die durch die Nichtlinearität von G1 eingebrachten Verzerrungen kürzen sich vollständig. Da keinerlei Signal-Rückführung vorhanden ist, sind Eigenschwingungen ausgeschlossen.
Error-Feedback
Active-Error-Feedback
 Error-Feedback Typ A
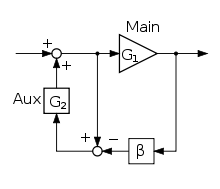
Error-Feedback Typ ADie nebenstehende Anordnung enthält zwar eine Gegenkopplungsschleife, gesamt betrachtet handelt es sich um das Fehlerkorrektur-Prinzip. Die Regelschleife aus G2 und β regelt solange, bis die Abweichung des Ausgangs- zum Eingangssignal gegen null geht und kompensiert damit die von G1 eingebrachten Abweichungen.
Damit nur Linearitätsfehler korrigiert werden gilt:
Durch diese Struktur bleiben die von Gegenkopplung bekannten Stabiliätsprobleme erhalten. Die Verlagerung der Schleife zu G2 bietet Vorteile, denn das Korrektursignal hat eine deutlich kleinere Amplitude und G2 kann daher grundsätzlich anders ausgelegt werden als G1.
 Error-Feedback Typ B
Error-Feedback Typ BBei der zweiten Variante des Error-Feedback-Prinzips agiert nur G1 als Leistungsverstärker. Durch entsprechendes Übertragungsverhalten von G2 bleibt die Fehlerkorrektur auf den unteren Frequenzbereich beschränkt und daher minimiert sich die Gefahr der Schwingungsneigung. Nur ein einziges leistungsverstärktes Signal liegt am Ausgang, eine Addition von Ausgangssignalen entfällt, dies verringert die Verluste, Rückwirkung und den Ausgangswiderstand.
Damit nur Linearitätsfehler korrigiert werden gilt:
Hawksford
 Hawksford-Error-Feedback
Hawksford-Error-FeedbackDie ungewöhnlichste Variante machte Malcolm Hawksford für Audio-Verstärker populär. Das Verständnis zur Funktionsweise ist nicht trivial. Hier knapp zusammengefasst die mathematische Herleitung:
Parallelstruktur aus G1, β und unterem Additionspunkt zusammenfassen:
Kreisstruktur aus G2 und obiger Parallelstruktur auflösen:
Für das Auslagern des Ausgangssignal aus der Parallelstruktur den Knoten hinter G1 nach vorne verschieben und anschließend mit der Kreisstruktur zusammenführen (Verschiebungsregeln):
Damit nur Linearitätsfehler korrigiert werden gilt:
Als besonders vorteilhaft erweist sich das G2 nur eine geringe Verstärkung von eins erfordert. Das erhöht die Stabilität der Schaltung gegenüber Eigenschwingungen.
Anmerkung: Die Gleichungen sind nur bei geringen Verzerrungen zur Stabilitätsanalyse geeignet, da G1 nichtlinear ist und damit die LZI-Bedingungen nicht vollständig erfüllt sind.
Current Dumping
 Current Dumping
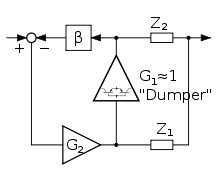
Current DumpingAuch Verstärker mit dem Konzept des Current Dumping gehören in die Kategorie der Fehlerkorrektur. Der Dumper ist ein Klasse-B-Gegentaktverstärker, der Verstärker G2 dagegen ein verzerrungsarmer Klasse-A-Verstärker und liefert nur ein hundertstel der Ausgangsleistung des Dumpers.
1975 von P. J. Walter als Patent eingereicht und erteilt worden. (U.S. Patent 3,970,953, ausgelaufen)
Anwendungen
Allgemein zur Linearisierung von analogen Schaltungen. Beispiele hierfür sind:
Weblinks
- Malcolm Hawksford
- Distortion Correction in Audio Power Amplifiers (PDF-Datei)
- Distortion Correction Circuits for Audio Amplifiers (PDF-Datei)
- Towards a Generalisation of Error Correction Amplifiers (PDF-Datei; 895 kB)
- A MOSFET Power Amplifier with (Hawksfork) Error Correction, cordellaudio.com
- Feedforward Error Correction in Power Amplifiers, Vanderkooy, John; Lipshitz, Stanley P., JAES Volume 28 Issue 1/2 pp. 2-16; February 1980 (kostenpflichtig)
- paX, power amplifier eXperimental von Jan Didden
Ausführlich beschrieben in den Elektor Ausgaben April 2008 + Mai 2008 (kostenpflichtig)
- Funktechnik
- An Adaptive Feedforward Amplifier Application for 5.8 GHz, Engin Kurt und Osman Palamutcuogullari (PDF-Datei; 485 kB)
- Balanced error correction for power amplifiers, Warren Guthrie (PDF-Datei; 541 kB)



















Wikimedia Foundation.