- Mobiler Manipulator
-
Als mobiler Manipulator wird allgemein ein aus einer selbstfahrenden Basis und einem Roboterarm zusammengesetztes Robotersystem bezeichnet. Sie werden oftmals, vor allem in der Forschung und bei nicht-industriellen Anwendungen, mit dem sehr viel pauschaleren Begriff Serviceroboter bezeichnet. Bei industriellen Anwendungen wird dagegen meist von mobilen Manipulatoren oder mobilen Roboter(armen) gesprochen.
Inhaltsverzeichnis
Komponenten
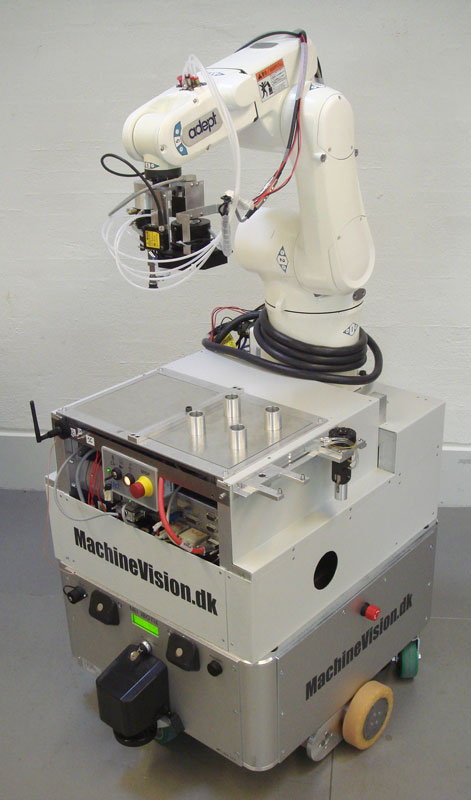
 Mobiler Manipulator Little Helper, entwickelt an der Universität Aalborg.
Mobiler Manipulator Little Helper, entwickelt an der Universität Aalborg.
Mobile Roboterplattform
Als mobile Basis können sowohl klassische fahrerlose Transportsysteme als auch mobile Roboter verwendet werden. Die Verwendung eines mobilen Roboters hat den Vorteil, dass dieser frei und autonom im Raum navigieren kann und so den Manipulator bei Problemfällen (Zielobjekt außer Reichweite, Manipulation von der aktuellen Position aus kinematisch nicht möglich, Änderung in der Position der zu bearbeitenden Teile, etc.) unmittelbar unterstützen kann anstatt ihn nur auf eine fest vorgegebene Position zu transportieren. Dabei ist die Manövrierfähigkeit der Plattform von großer Bedeutung. Im Gegensatz zu FTS kann ein mobiler Roboter auch jederzeit dynamisch zugewiesene Positionen anfahren. Allerdings stößt die klassische Differentialkinematik besonders in unmittelbarer Nähe zu Arbeitsstationen an ihre Grenzen und das Versetzen des Roboters ist dann nur durch mehr oder weniger aufwändiges Rangieren möglich. Die Verwendung omnidirektionaler Antriebe setzt sich deshalb immer mehr durch.
Ablagemöglichkeiten
Wenn der mobile Manipulator Objekte auch effizient transportieren soll, muss er mit geeigneten Ablagemöglichkeiten ausgestattet sein. Diese können, bei entsprechender Gestaltung, auch verwendet werden, um das Wechseln des Griffs zu ermöglichen, ohne dass ein zweiter Arm eingesetzt wird. (Eine Bierflasche, die am Verschluss aus dem Kasten gezogen wurde, muss zum Beispiel erst abgestellt und am Korpus gegriffen werden, ehe eingeschenkt werden kann.) Größere Ablagemöglichkeiten machen die Arbeit des Roboters zwar prinzipiell effizienter, erschweren aber auch die Navigation des Fahrzeugs.
Manipulatorarm
Dies kann sowohl ein Industrieroboter als auch ein speziell entwickelter Roboterarm sein. Da mittlerweile auch eine Auswahl kleiner und leichter Roboterarme kommerziell erhältlich ist, ist die Verwendung von selbst entwickelten Armen stark zurückgegangen. (Siehe hierzu auch: Flexibler Manipulatorarm)
Greifer
Der Endeffektor muss passend für das zu manipulierende Gut ausgewählt werden. Anthropomorphe Greifer mit mehreren beweglichen Fingern sind zunehmend verfügbar und werden vor allem in der Forschung eingesetzt.
Bildverarbeitung
Wenn der Roboter Teile in der Arbeitsumgebung manipulieren soll, ist fast immer ein Bildverarbeitungssystem erforderlich. Wenn nur fest gelernte Armbewegungen ausgeführt werden sollen, muss zumindest der Versatz zwischen der aktuellen und der beim Einlernen verwendeten Plattformposition festgestellt und berücksichtigt werden. Um die Aufgaben menschlicher Arbeiter zu übernehmen muss der Roboter zusätzlich noch mit mehr oder weniger ungeordneten Teilen (auch als Griff in die Kiste bekannt) oder variablen Ablageorten zurechtkommen.
Koordinierende Steuerung
Die einzelnen Steuerungen von mobilen Robotern und Roboterarmen sind bereits seit Jahrzehnten im Einsatz und weit entwickelt. Bei der Kombination beider Systeme entsteht jedoch eine sehr große Anzahl möglicher Fehler- und Problemfälle die es nötig macht, eine zusätzliche koordinierende Steuerung hinzuzufügen. Diese sollte vor allem selbstständig Lösungswege finden, wenn die befohlene Manipulation nicht ausgeführt werden kann, aus einer anderen Pose aber möglich wäre. Hilfreich ist dabei die Steuerung des Gesamtsystems als eine geschlossene kinematische Kette, was jedoch in der Umsetzung aufgrund hoher Redundanz ausgesprochen schwierig ist.
Sicherheitssystem
Prinzipiell ist es möglich, die Sicherheitseinrichtungen, die für stationäre Manipulatorarme bzw. normale autonome Fahrzeuge eingesetzt werden, auch für mobile Manipulatoren zu nutzen. Wenn sich ein mobiler Manipulator jedoch den Arbeitsbereich mit Personen oder zumindest anderen Fahrzeugen teilt, werden an das Sicherheitssystem gänzlich neue und sehr hohe Anforderungen gestellt, da sehr viele mögliche Gefahrensituationen entstehen.
Vor- und Nachteile
Bei der Kombination von mobilen Roboterplattformen mit Roboterarmen sind die sich ergebenden Vor- und Nachteile größer als die Summe ihrer jeweiligen Teile.
Vorteile:
- Der Funktionsumfang und die möglichen Anwendungen steigen sprunghaft.
- Das gesamte Robotersystem wird erheblich unabhängiger von unterstützenden Systemen (Be- und Entladestationen, Fördertechnik, Übergabeeinrichtungen, …) und kann dadurch, zumindest theoretisch, preiswerter werden.
- Durch mobile Manipulatoren ist auch die Automatisierung komplexerer körperlicher Tätigkeiten möglich, die bisher nur durch Menschen ausgeführt werden konnten und bei diesen durch die körperliche Belastung häufig zu Gesundheitsproblemen führen.
- Das Gesamtsystem kann erheblich flexibler auf Ungenauigkeiten und Abweichungen reagieren, zum Beispiel indem die Basis des Armes nachgeführt wird, wenn ein Objekt nicht direkt erreichbar ist.
Nachteile:
- Durch die Anforderungen beider Komponenten behindern sich diese oftmals gegenseitig:
- Der Arm benötigt eine große stabile Basis, um effizient arbeiten zu können, die Plattform sollte jedoch klein und leicht sein, um effizient navigieren zu können.
- Je kleiner die Taktzeiten der Plattform werden sollen, desto schneller muss sie fahren und umso ungenauer werden Zielpositionen erreicht. Je ungenauer aber die Startposition des Armes bekannt ist, desto länger werden aufgrund der erforderlichen Korrekturen dessen Taktzeiten.
- Um die Laufzeit einer batteriebetriebenen Plattform zu erhöhen sollten das Gesamtgewicht und der Stromverbrauch minimiert werden. Ein Roboterarm arbeitet jedoch umso effizienter, je mehr Funktionen (und damit meist auch Zusatzkomponenten) er vereint.
- Dadurch, dass sich die Arbeitsumgebung des Armes ständig ändert, sind viele vorher verwendete Hilfskonstruktionen (Teilezuführung mit relativ zum Arm definierter Endlage, unveränderliche Übergabepositionen für Bauteile, definierte Beleuchtung, etc.) nicht mehr oder nur noch sehr schwer einsetzbar.
- Außerdem sind viele mobile Manipulatoren nicht flexibel genug, um für schnell wechselnde Aufgaben eingesetzt zu werden. Dies ist eine der größten Hemmschwellen für den verbreiteten Einsatz auch in kleinen und mittleren Betrieben.[1]
- Bei der Interaktion mit Menschen ergeben sich völlig neue Gefahrensituationen, die erhöhte Anforderungen an die Sicherheitstechnik stellen und den Anteil der durchsetzbaren Lösungen im Vergleich zu den bereits technisch machbaren Lösungen stark einschränken.
- Zurzeit gibt es keine vollständig passenden Normen, Richtlinien oder Gestaltungsvorschläge für diese Art Roboter, so dass die möglichen rechtlichen Folgen von Verletzungen oder Schäden schwer abzusehen sind.
- Mit der gestiegenen Anzahl an Handlungsmöglichkeiten sind auch überproportional höhere Anforderungen an die Steuerung des Gesamtsystems verbunden, insbesondere was die autonome Fehlerbehandlung angeht. Damit steigt auch das Risiko eines Maschinenstillstands.
Einsatzbereiche
Die möglichen Einsatzbereiche mobiler Manipulatoren sind vielfältig und zurzeit noch nicht vollständig absehbar. Einige bekannte Anwendungen sind:
Hol- und Bringdienste im Haushalt
Angeführt von der weit verbreiteten Applikation Bier holen[2] werden vor allem in Forschungsprojekten im Bereich Servicerobotik vorzugsweise Aufgaben zu Demozwecken herangezogen, die auch in Privathaushalten auftreten und dementsprechend medienwirksam sind. Die wissenschaftliche Herausforderung ist bei diesen Aufgaben meist erheblich höher als der zu erwartende wirtschaftliche Nutzen.
Pflege
Mit zunehmendem Anteil älterer und pflegebedürftiger Menschen wird auch der Bedarf an Pflegekräften zunehmen. Es wird erwartet, dass sich bis 2050 der Anteil der pflegebedürftigen Menschen bezogen auf die Zahl der Erwerbstätigen verdreifacht.[3] In diversen Forschungsprojekten wird deshalb, vor allem in Japan, intensiv an Pflegerobotern gearbeitet.
Kommissionierung
Momentan laufen Entwicklungsprojekte, um mobile Manipulatoren in der Kommissionierung schwerer oder unhandlicher Bauteile einzusetzen. Dort sollen Fehlgriffe, die hohe Folgekosten verursachen können, verhindert werden. Außerdem werden menschliche Arbeiter von auf Dauer gesundheitsschädlichen Aufgaben befreit, was umso relevanter wird, je weiter das Durchschschnittsalter in der Belegschaft steigt.
Meilensteine
Jahr Projekt / Produkt Firma / Einrichtung Land 1996 Hilare 2bis LAAS-CNRS  Frankreich
Frankreich2000 Jaume Universität Jaume, Robotic Intelligence Lab  Spanien
Spanien2004 Fausto Universität Verona  Italien
Italien2005 ASSISTOR BMBF-Forschungsprojekt  Deutschland
Deutschland2006 MM-500 SK Neobotix GmbH Deutschland2008 PR2 Willow Garage  USA
USA2008 MM-KR16 Neobotix GmbH Deutschland2009 Little Helper Universität Aalborg  Dänemark
Dänemark2010 Omnirob KUKA Roboter DeutschlandHersteller
Die wichtigsten Hersteller von kommerziellen mobilen Manipulatoren sind:
- Deutschland:
- Artur Bär Maschinenbau GmbH
- KUKA
- Neobotix GmbH
- USA
Weblinks
Hersteller
Forschungsprojekte und -Institute
- HAW Ingolstadt: Mobile Robotik in der Vorkommissionierung
- BMBF-Projekt ASSISTOR
- Universität Aalborg: Projekt „Little Helper“
- Fraunhofer IPA: Projekt rob@work
Einzelnachweise
- ↑ Martin Hägele, Nikolaus Blümlein, Oliver Kleine et al.: EFFIROB – Wirtschaftlichkeitsanalysen neuartiger Servicerobotik-Anwendungen und ihre Bedeutung für die Robotik-Entwicklung, Fraunhofer IPA & ISI, 2011, S. 11
- ↑ Willow-Garage Applikation Beer-Me-Robot. Abgerufen am 5. August 2011 (englisch).
- ↑ R. Schnabel: Zukunft der Pflege – Pressemitteilung. Universität Duisburg-Essen und ZEW, 2. Mai 2007
Wikimedia Foundation.