- Robonaut
-
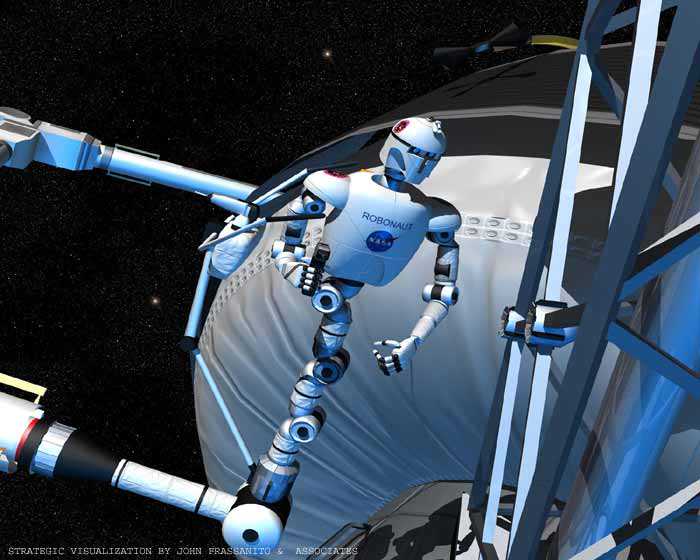
 Robonaut arbeitet an der Internationalen Raumstation (ISS) (Computergrafik)
Robonaut arbeitet an der Internationalen Raumstation (ISS) (Computergrafik)
 Robonaut auf einer Segway-Plattform
Robonaut auf einer Segway-PlattformEin Robonaut (Robotic Astronaut) ist ein humanoider Roboter, der von der NASA sowie der Defense Advanced Research Projects Agency (DARPA) für die Extra-vehicular Activity, d.h. Außenbordaktivitäten während Weltraumflügen oder bei Raumstationen (ISS) konzipiert worden ist. Der Name Robonaut ist ein Kofferwort aus Robotic (Robotik) und Astronaut.
Der Robonaut wurde in Zusammenarbeit von der NASA sowie der Defense Advanced Research Projects Agency im Johnson Space Center entwickelt. Ziel war es, einen Roboter zu entwickeln, der während Außenbordtätigkeiten im All (beispielsweise an einem Space-Shuttle-RMS für Reparaturen an der Außenhülle befestigt) gleichwertige oder sogar bessere Fähigkeiten aufweist als ein menschlicher Astronaut.[1]
Es gibt mehrere Modelle dieses Roboters. Manche sind mit verschiedenen Antriebsmitteln versehen, wie beispielsweise etwa eine Segway-Plattform[2] auf vier Rädern. Diese bodengestützten Robonauten werden für Missionen auf Planetenoberflächen entwickelt. Der Roboter kann über Telepräsenz[3] gesteuert werden und besitzt außerdem verschiedene Stufen autonomer Intelligenz (robotic autonomy). Eine Roboterhand hat 14 Freiheitsgrade[4] und Tastsensoren an den Fingern.[5]
Inhaltsverzeichnis
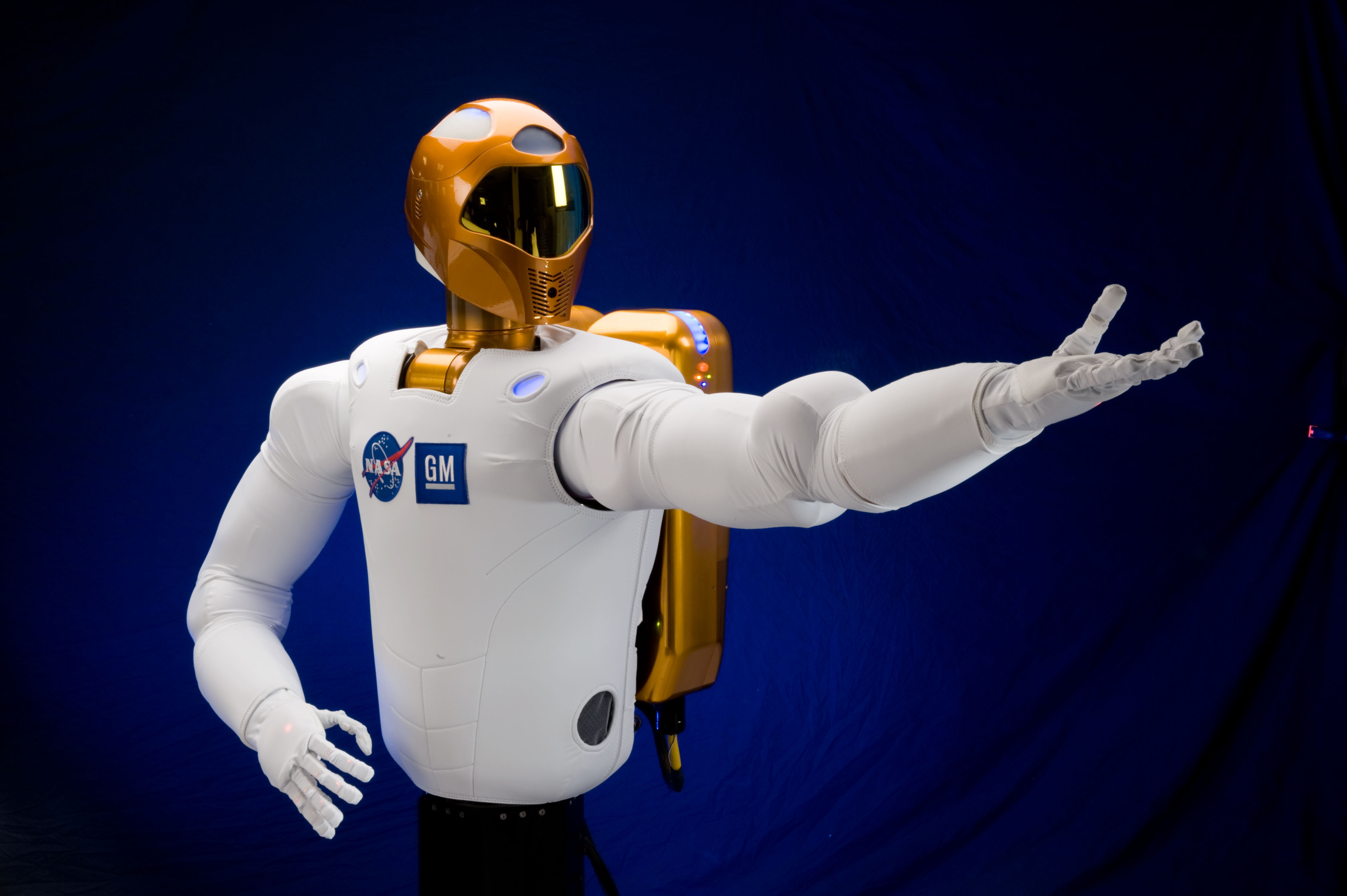
Robonaut 2 (R2)
 Robonaut 2 (R2) im Juli 2009
Robonaut 2 (R2) im Juli 2009Der von der NASA und General Motors gemeinsam entwickelte Robonaut 2 startete im Februar 2011 mit der Mission STS-133 des Space Shuttle Discovery zur Internationalen Raumstation.[6][7] Mit seinen menschenähnlichen Händen soll er dieselben Werkzeuge benutzen wie die menschliche ISS-Besatzung.[8] Der Robonaut 2 ist modular aufgebaut, sodass etwa die Arme, der „Kopf“ oder der Torso ausgetauscht werden können. Nach der Ankunft an der ISS sollen zunächst einige Versuchsreihen durchgeführt werden, wonach der Robonaut durch Austausch einzelner Module schrittweise modifiziert wird. Nachdem er zunächst fest auf einer Basis installiert wird, sollen auf diese Weise Beine zur Fortbewegung in der Station hinzukommen. Später soll Robonaut 2 auf die gleiche Art zu Außenbordeinsätzen befähigt werden.
Der Robonaut 2 besitzt Kameras und kann aufgrund der zugrundeliegenden Bildanalyse eigenständig entscheiden, welche Aktionen auszuführen sind. Die dazu nötige komplexe Bildverarbeitung wurde von der NASA mit der deutschen Softwarebibliothek für die Bildverarbeitung HALCON von MVTec umgesetzt. Diese Bildverarbeitungssoftware setzt das Gesehene in Echtzeit in Motorik-Befehle um. So ist der Robonaut 2 in der Lage, einen Text in ein Handy einzugeben, Schalter zu erkennen und zu bedienen sowie Werkzeuge aufzunehmen und einzusetzen. Der Robonaut 2 kann also selbstgesteuert Arbeiten übernehmen, beispielsweise außerhalb der Raumstation. Dort soll er tatsächlich eingesetzt werden, um die Astronauten zu entlasten.
Projekt M
Das „Projekt M“ der NASA ist ein Konzept, das vorsieht, eine Version des Robonaut 2 mit Beinen im Jahr 2013 auf dem Mond zu landen. Ziel der Mission wäre vor allem eine Demonstration der YEA-Technologie. Neben dem Robonaut würde auch der Mondlander neue Technologie verwenden.[9] Dennoch soll der Roboter auch wissenschaftliche Arbeiten übernehmen. So sind die Sammlung von Proben oder auch Reparaturen an einigen Instrumenten denkbar. [10]
Technische Publikationen
- R.O. Ambrose, H. Aldridge, R.S. Askew, R. Burridge, W. Bluethman, M.A. Diftler, C. Lovchik, D. Magruder, F. Rehnmark: ROBONAUT: NASA’s Space Humanoid, IEEE Intelligent Systems Journal, Vol. 15, Nr. 4, S. 57-63, Juli/Aug. 2000, doi:10.1109/5254.867913.
- M. A. Diftler, C. J. Culbert, and R.O. Ambrose: Evolution of the NASA/DARPA Robonaut Control System. In: IEEE International Conf. Robotics Automation, S. 2543-2548, 2003.
- G. Landis: Teleoperation from Mars Orbit: A Proposal for Human Exploration In: Acta Astronautica, Vol. 61, No. 1, Jan. 2008, S. 59-65; IAC-04-IAA.3.7.2.05, 55th International Astronautical Federation Congress (2004).
Siehe auch
Weblinks
 Commons: Robonaut – Sammlung von Bildern, Videos und Audiodateien
Commons: Robonaut – Sammlung von Bildern, Videos und Audiodateien- NASA: Robonaut home page (englisch)
- NASAtelevision - Robonaut 2 Joins ISS Crew (YouTube-Video, 18. März 2011, englisch)
Einzelnachweise
- ↑ http://robonaut.jsc.nasa.gov/
- ↑ USA Today, Rise of Robots, 20. Oktober 2004
- ↑ http://www.heise.de/tp/r4/artikel/18/18079/1.html
- ↑ http://er.jsc.nasa.gov/SEH/Robotics/index.html
- ↑ M.K. O'Malley and R.O. Ambrose, Haptic feedback applications for Robonaut. In: Industrial Robot: An International Journal, Vol. 30, pp. 531-542 (2003) DOI: 10.1108/01439910310506800
- ↑ http://www.youtube.com/watch?v=lY-SJyS18lA
- ↑ http://www.golem.de/1004/74559.html
- ↑ Netzwelt vom 15. April 2010
- ↑ http://robonaut.jsc.nasa.gov/m-whitepaper.asp
- ↑ http://www.golem.de/1007/76229.html

Wikimedia Foundation.