- Einstellregeln nach Chien, Hrones und Reswick
-
Als Faustformelverfahren werden in der Automatisierungstechnik bzw. in der Regelungstechnik heuristische Methoden zur Dimensionierung eines Reglers bezeichnet, die ohne mathematisches Modell der Regelstrecke auskommen. Anstatt der Modellbildung müssen in der Regel Experimente an der zu regelnden Anlage vorgenommen werden.
Inhaltsverzeichnis
Methode von Ziegler und Nichols
Die Methode von Ziegler und Nichols ist ein heuristisches Verfahren zur Bestimmung von Reglerparametern[1]. Der resultierende Regler kann ein P-, PI- oder PID-Regler sein.
Die Methode ist daher nur für existierende Anlagen geeignet, die stabil sind oder an denen instabiles Verhalten keine Schäden verursachen kann. Sie eignet sich daher nicht zum Einsatz in der Projektierungsphase einer Anlage.
Gültigkeitsbereich
Die Reglereinstellungen nach Ziegler-Nichols sind für stark verzögernde Prozesse, wie sie z. B. in verfahrenstechnischen Prozessen auftreten, vorgesehen. Charakteristisch für solche Prozesse ist die s-förmige Gestalt der Sprungantwort. Bei Einstellung des Reglers nach diesem Verfahren, wird ein leicht schwingendes Führungsverhalten (schlechter als beim Reglerentwurf nach dem Betragsoptimum) aber ein gutes Störverhalten erreicht. Es eignet sich deshalb vor allem für Prozesse, bei denen überwiegend Störungen ausgeregelt werden sollen.
Verfahren
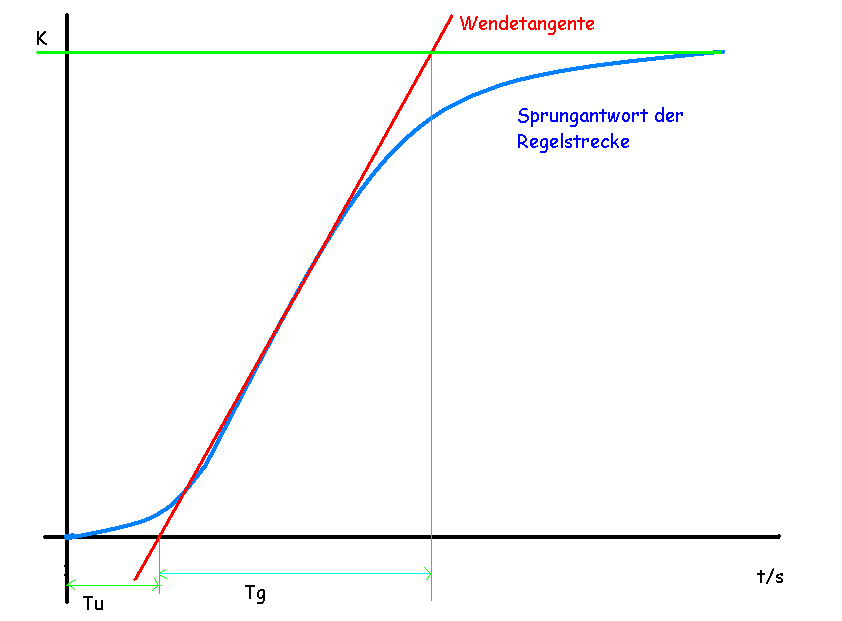
Das Verfahren steht in zwei Varianten zur Verfügung. In der ersten Variante (auch: erste Einstellregel nach Ziegler/Nichols) wird die Regelstrecke als Übertragungsglied erster Ordnung mit Totzeit (PT1Tt-Glied) approximiert. Es müssen dessen statische Verstärkung Ks, die Zeitkonstante T sowie die Totzeit Tt bekannt sein und ggf. experimentell durch einen Sprungversuch (siehe Bild, Sprungantwort) ermittelt werden. Es gilt Näherungsweise mit den Werten aus der Sprungantwort T = Tg und Tt = Tu.
In der zweiten Variante (auch: zweite Einstellregel nach Ziegler/Nichols) wird keine Annahme bezüglich des Übertragungsverhaltens der Regelstrecke getroffen. Der Regelkreis wird mit Hilfe eines proportionalen Reglers geschlossen und die Reglerverstärkung solange erhöht, bis der Ausgang des Regelkreises bei konstantem Eingang eine Dauerschwingung mit der Periode Tkrit bei der Reglerverstärkung Kp,krit ausführt.
Die Einstellregeln für die Verstärkung Kp, die Nachstellzeit Tn und die Vorhaltezeit Tv lauten für beide Verfahren wie in folgender Tabelle angegeben.
Voraussetzung Regler Reglerparameter Approximation der Strecke durch PT1Tt-Glied P 
PI 
PID 
Kritische Verstärkung und Periodendauer bekannt P 
PI 
PD 
PID 
Einschränkung
Ein Sprungversuch wie oben beschrieben kann jedoch nur dort durchgeführt werden, wo ein Ausscheren des realen Systems in den grenzstabilen Bereich keine schädlichen Folgen hat. Ein instabiler Tempomat am Auto würde konstant Vollgas geben, ein instabiler Kühlschrank würde laufen bis zur Überhitzung des Motors.
Einstellregeln nach Chien, Hrones und Reswick
Die Einstellregeln nach Chien, Hrones und Reswick sind eine 1952 entwickelte Vorgehensweise zur günstigen Einstellung von Reglern. Sie gelten als eine Weiterentwicklung der zweiten Methode von Ziegler und Nichols. Vorteilhaft ist, dass die Regelparameter getrennt sind für ein günstiges Stör- und Führungsverhalten. Sie sind ebenso unterteilt für aperiodische oder periodische Regelungen[2].
Gültigkeitsbereich
Die Regeln gelten für Strecken höherer Ordnung, von denen die Parameter: statische Verstärkung Ks, Verzugszeit Tu und Ausgleichszeit Tg bekannt sein müssen.
Verfahren
Die Einstellregeln für die Verstärkung Kp, die Nachstellzeit Tn und die Vorhaltezeit Tv lauten wie in folgender Tabelle angegeben.
Regler Aperiodischer Regelverlauf Regelverlauf mit 20% Überschwingen Störung Führung Störung Führung P Kp 
PI Kp 
Tn 



PID Kp 

Tn 


Tv 


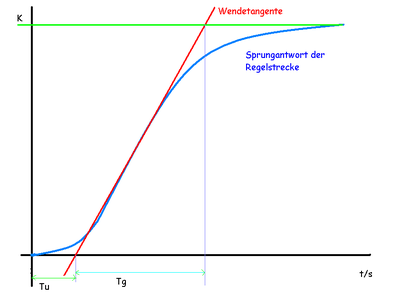 Sprungantwort einer Regelstrecke mit Wendetangente zur Bestimmung von Tu und Tg.
Sprungantwort einer Regelstrecke mit Wendetangente zur Bestimmung von Tu und Tg.Einschränkung
Es gelten die gleichen Einschränkungen wie bei der Methode von Ziegler und Nichols. Zur Bestimmung der Strecken-Kennwerte müssen Experimente am ungeregelten Prozess durchführbar sein, ohne dass dieser dadurch beschädigt wird.
T-Summen-Regel
Diese Regel gilt für Strecken mit Tiefpassverhalten, die eine S-förmige Übergangsfunktion aufweisen. Sie sind durch die Übertragungsfunktion

beschrieben sind, wird die Summenzeitkonstante TΣ als Summe aller verzögernden Zeitkonstanten abzüglich aller differenzierenden Zeitkonstanten gebildet[3]:

Die Summenzeitkonstante kann auch direkt aus der experimentell ermittelten Übergangsfunktion ermittelt werden. Es gilt
mit
 Sprungantwortfunktion der Regelstrecke.
Sprungantwortfunktion der Regelstrecke.Für die Reglereinstellungen gilt dann folgendes:
- PI-Regler:

- PID-Regler:

oder für schnelleren Regelverlauf:
- PI-Regler:

- PID-Regler:

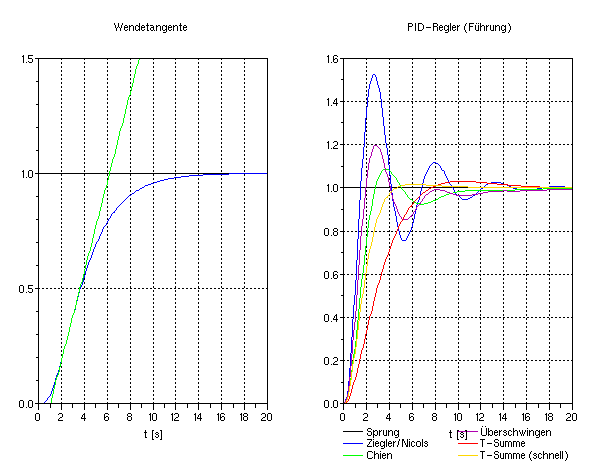
Vergleich der Verfahren
 Vergleich der Faustformeln anhand einer Beispiel-Regelstrecke
Vergleich der Faustformeln anhand einer Beispiel-RegelstreckeMit einem Scilabscript wurden folgende Parameter für die Modell-Regelstrecke ermittelt:
========================================================== Parameter der Regelstrecke T1=2.400000 T2=1.200000 T3=0.600000 T4=0.100000 1 ----------------------------------- 2 3 4 1 + 4.3s + 5.46s + 2.232s + 0.1728s Tu=1.030072 Tg=5.183502 Tg/Tu=5.032175 TSum=4.348428 ========================================================== Ziegler-Nichols KR=6.038610 Tn=2.060144 Tv=0.515036 ========================================================== Chien/Hrones/Reswick (aperiodisch) KR=3.019305 Tn=5.183502 Tv=0.515036 ========================================================== Chien/Hrones/Reswick (überschwingen) KR=4.780567 Tn=6.997728 Tv=0.484134 ========================================================== T-Summe KR=1.000000 Tn=2.900402 Tv=0.726187 ========================================================== T-Summe (schnell) KR=2.000000 Tn=3.478742 Tv=0.847943 ==========================================================Empirische Dimensionierung
In der industriellen Praxis werden Regelkreise häufig ohne Verwendung eines jeglichen Modelles durch Ausprobieren von Reglereinstellungen realisiert. Dabei werden zumeist Proportional-Integral-Differential-Regler (PID-Regler) verwendet. Die Parameter für den Proportional-, Integral- und Differentialanteil werden nach praktischen Erfahrungswerten vorgewählt und dann variiert[4].
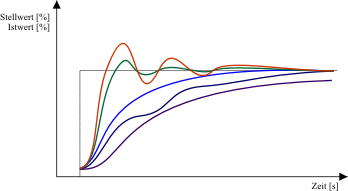 Unterschiedliche Regelgrößenverläufe (Istwerte) nach einem Stellgrößensprung bei verschiedenen Reglereinstellungen.
Unterschiedliche Regelgrößenverläufe (Istwerte) nach einem Stellgrößensprung bei verschiedenen Reglereinstellungen.Anhand der Istwertverläufe kann der Regelkreis nachoptimiert werden:
- Violett: Istwert nähert sich nur langsam dem Sollwert.
Einstellregel: Proportionalanteil erhöhen. Falls dies zu einer Verbesserung führt, anschließend Integrationszeit verkleinern. Dieses wiederholen bis ein zufriedenstellendes Reglerergebnis erreicht ist. - Blau: Istwert nähert sich mit leichten Schwingungen nur langsam dem Sollwert.
Einstellregel: Proportionalanteil erhöhen. Falls dies zu einer Verbesserung führt, anschließend Vorhaltezeit (Differenzierzeit) verkleinern. Dieses wiederholen bis ein zufriedenstellendes Reglerergebnis erreicht ist. - Hellblau: Istwert nähert sich dem Sollwert ohne wesentlich überzuschwingen.
Optimales Reglerverhalten für Prozesse, die kein Überschwingen zulassen. - Grün: Istwert nähert sich dem Sollwert mit leichtem gedämpften Überschwingen.
Optimales Reglerverhalten für schnelles Anregeln und zum Ausregeln von Störanteilen.
Einstellregel: Das erste Überschwingen soll 10% des Sollwertsprungs nicht überschreiten. - Rot: Istwert nähert sich schnell dem Sollwert, schwingt aber weit über. Die Schwingungen sind gedämpft und damit gerade noch stabil
Einstellregel: Proportionalanteil vermindern. Falls dies zu einer Verbesserung führt, anschließend Integrationszeit vergrößern. Dieses wiederholen bis ein zufriedenstellendes Reglerergebnis erreicht ist.
Weitere praktische Aspekte der Regelungstechnik sind der Literatur zu entnehmen.
Literatur
- Jan Lunze: Regelungstechnik, Springer Verlag, Bd. 1 (2005) ISBN 3-540-28326-9, Bd. 2 (2006) ISBN 3-540-32335-X
- Heinz Unbehauen: Regelungstechnik, Vieweg, Braunschweig/Wiesbaden, Bd. 1 (2005) ISBN 3-528-93332-1, Bd. 2 (2000) ISBN 3-52873348-9
- Manfred Schleicher: Regelungstechnik für den Praktiker (2006), Fa. JUMO GmbH & Co, ISBN 3-935742-00-2
- Berthold Heinrich [Hrsg.]: Messen, Steuern, Regeln (2005), Vieweg Verlag, Wiesbaden, ISBN 3-8348-0006-6
Quellen
- ↑ Ziegler, J. G.; Nichols, N. B.: Optimum settings for automatic controllers, Trans. ASME, 64 (1942), pp. 759-768
- ↑ Manfred Reuter, Serge Zacher: Regelungstechnik für Ingenieure, Vieweg Verlag, 11. Auflage (2004), ISBN 3-528-05004-7
- ↑ Udo Kuhn: Eine praxisnahe Einstellregel für PID-Regler: Die T-Summen-Regel, Automatisierungstechnische Praxis, Nr. 5, 1995, S. 10-16
- ↑ Jürgen Müller: Regeln mit SIMATIC, Publicis Corporate Publishing, Erlangen (2004), ISBN 3-89578-248-3
- PI-Regler:
Wikimedia Foundation.