- Gesamtdrehimpuls
-
Physikalische Größe Name Drehimpuls Formelzeichen der Größe 
Größen- und
Einheiten-
systemEinheit Dimension SI kg · m2 · s−1 M · L2 · T−1 Der Drehimpuls ist physikalische Erhaltungsgröße. Ihre SI-Einheit ist Newtonmeter · Sekunde oder Joule · Sekunde, welche die Basiseinheiten M · L2 · T−1 zusammenfasst. Der Drehimpuls hat die Dimension einer Wirkung. Veraltete Bezeichnungen für den Drehimpuls eines Objekts sind Drall oder Schwung. Die Angabe eines Drehimpuls bezieht sich immer auf eine Achse. Meist wird, ohne dass dies ausdrücklich erwähnt wird, die Achse gewählt, um die sich das betrachtete Objekt dreht.
Der Drehimpuls
eines Massenpunktes ist das Kreuzprodukt seines Ortsvektors  mit seinem Impuls
mit seinem Impuls 
Der Drehimpuls ändert sich, wenn ein Drehmoment wirkt, das heißt, wenn eine Kraft mit einem Hebelarm angreift.
Inhaltsverzeichnis
Grundlagen
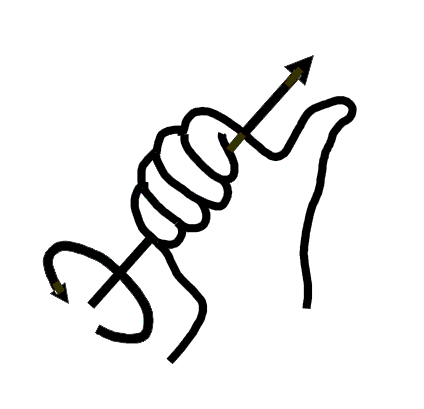
 Rechte-Hand-Regel
Rechte-Hand-RegelBei einer Kreisbewegung kann man sich den Drehimpuls als Pfeil vorstellen, dessen Richtung die Drehachse angibt und dessen Länge den Schwung der Drehung angibt: Je länger der Pfeil, desto mehr Drehimpuls. Der Drehimpuls wächst mit:
- höherer Geschwindigkeit,
- größerer Masse sowie
- größerem Abstand zur Drehachse.
Bei einer Kreisbewegung steht der Drehimpuls senkrecht auf der Ebene, in der sich die Masse bewegt. Seine Länge ist gleich dem Produkt aus Masse, Radius und Geschwindigkeit.
Der Drehimpuls zeigt in die Richtung, die mit dem Ort und der Geschwindigkeit eine sogenannte Rechtsschraube bildet. Es gilt die Rechte-Hand-Regel: Wenn die gekrümmten Finger der rechten Hand die Richtung der Drehbewegung angeben, so zeigt der Daumen in Richtung des Drehimpulses. Die Tatsache, dass die rechte und nicht die linke Hand für diese Regel verwendet wird, hängt mit der Definition des Kreuzprodukts zusammen.
Drehimpulserhaltung
Aus der Tatsache, dass die physikalischen Gesetze nicht von der Orientierung im Raum abhängen, folgt dass der Drehimpuls eine Erhaltungsgröße ist. Anders ausgedrückt: Der Drehimpuls eines geschlossenen physikalischen Systems bleibt unverändert, egal welche Kräfte und Wechselwirkungen zwischen den Bestandteilen des Systems wirken. Dies gilt für den Drehimpuls bezüglich beliebiger Achsen und wird verkürzt mit dem Begriff Drehimpulserhaltung bezeichnet.
 Salto vorwärts
Salto vorwärtsIm Sport, beispielsweise beim Eiskunstlauf, macht man sich die Drehimpulserhaltung zunutze: Da der Drehimpuls sowohl von der Rotationsgeschwindigkeit als auch vom Abstand der rotierenden Masse zur Rotationsachse abhängt, geht eine Abstandsänderung mit einer entsprechenden Änderung der Winkelgeschwindigkeit einher. So wird bei der Pirouette die Drehung schneller, wenn man die Arme an den Körper legt. Das Trägheitsmoment der Arme bezüglich der Drehachse wird dabei verringert. Da der Gesamtdrehimpuls aber erhalten bleibt, nimmt die Rotationsgeschwindigkeit zu. Dieser Sachverhalt wird auch als Pirouetteneffekt bezeichnet.
Das gleiche Prinzip nutzen Turner beim Salto. In der Luft werden Arme und Beine angezogen, um so aus dem beim Absprung erhaltenen Drehimpuls eine möglichst schnelle Drehung zu gewinnen. Eine Öffnung der Haltung vor dem Auftreffen auf den Boden verringert die Drehgeschwindigkeit und erlaubt eine stehende Landung.
Verschiebung, Drehung, Spiegelung
Der Drehimpuls hängt davon ab, welchen Punkt man als Ursprung wählt. Bei Verschiebung des Ursprungs ändert sich der Vektor jedes Ortes in
 und der Drehimpuls in
und der Drehimpuls inOft wählt man als Ursprung den Schwerpunkt oder einen Punkt, der bei den betrachteten Drehungen ruht.
Weil der Drehimpulsvektor ein Kreuzprodukt ist, ändert sich der Drehimpuls bei Drehungen so wie der Ort oder die Geschwindigkeit.
Bei einer Spiegelung am Ursprung geht der Ort in den entgegengesetzten Ort über, und auch das Vorzeichen der Geschwindigkeit kehrt sich um. Daher ändert sich der Drehimpuls nicht bei der Spiegelung am Ursprung. Um das verschiedene Verhalten bei Spiegelungen zu unterscheiden, nennt man den Drehimpuls einen Axialvektor oder Pseudovektor. Beim Ortsvektor und der Geschwindigkeit spricht man von polaren Vektoren.
Ebene Bahn, Flächensatz
Behält der Drehimpuls eines Teilchens (beispielsweise die Erde, die die Sonne umläuft) jederzeit den anfänglichen Wert, dann verläuft die Bahn des Teilchens in einer Ebene und kann in Polarkoordinaten angegeben werden.
Denn das Kreuzprodukt steht senkrecht auf seinen Faktoren und zu allen Zeiten t gilt
Wenn nun der Drehimpuls zeitunabhängig ist,
 dann erfüllt jeder Bahnpunkt die Ebenengleichung
dann erfüllt jeder Bahnpunkt die EbenengleichungEs handelt sich also um eine Bewegung in der Ebene durch den Ursprung senkrecht zum Drehimpuls.
Zudem gilt das zweite Keplersche Gesetz: Der Fahrstrahl zum Ursprung überstreicht in gleichen Zeiten gleich große Flächen.
Denn in einer kurzen Zeit dt ändert sich der Fahrstrahl
 um
um  und überstreicht dabei die Fläche des Dreiecks mit diesen beiden Seiten. Das Dreieck ist halb so groß wie das von beiden Vektoren aufgespannte Parallelogramm, dessen Größe durch das Kreuzprodukt gegeben ist. In der Zeit dt überstreicht der Fahrstrahl folglich die Fläche
und überstreicht dabei die Fläche des Dreiecks mit diesen beiden Seiten. Das Dreieck ist halb so groß wie das von beiden Vektoren aufgespannte Parallelogramm, dessen Größe durch das Kreuzprodukt gegeben ist. In der Zeit dt überstreicht der Fahrstrahl folglich die FlächeWenn der Drehimpuls sich nicht mit der Zeit ändert, ist folglich die Flächengeschwindigkeit konstant.
Der Flächensatz gilt auch in relativistischer Physik, wenn zudem die Energie E erhalten ist. Denn in relativistischer Physik ist
und
Eulerscher Drehimpulssatz
Um den Impuls eines Körpers zu ändern, muss eine Kraft wirken. Die zeitliche Änderung des Impulses ist die Kraft,
Um den Drehimpuls eines Körpers zu ändern, muss eine Kraft mit einem Hebelarm angreifen. Solch eine Hebelkraft nennt man Drehmoment.
Genauer besagt der Eulersche Drehimpulssatz:
Die zeitliche Änderung des Drehimpulses ist gleich dem Drehmoment,
Er wurde 1754 von Leonhard Euler formuliert.
Das Drehmoment ist das Kreuzprodukt von Ortsvektor (Hebelarm) und Kraft:
Der Drehimpulssatz ergibt sich, wenn man den Drehimpuls nach der Zeit ableitet,
Da die Geschwindigkeit und der Impuls parallel sind, verschwindet ihr Kreuzprodukt. Aus der zeitlichen Änderung des Impulses
 folgt so die zeitliche Änderung des Drehimpulses,
folgt so die zeitliche Änderung des Drehimpulses,Handelt es sich bei der Kraft
 um eine Zentralkraft
um eine Zentralkraft  so ist der Drehimpuls erhalten:
so ist der Drehimpuls erhalten: folglich
folglich 
Der Drehimpuls eines starren Körpers
Bei einem starren Körper bezieht man den Drehimpuls auf den Schwerpunkt des Körpers und nennt ihn Eigendrehimpuls oder kürzer, Drehimpuls.
Der Drehimpuls eines starren Körpers (zum Beispiel eines Spielzeugkreisels, eines Autorades oder der Erde) wird durch seine Drehgeschwindigkeit, genauer seine Winkelgeschwindigkeit
 , und den Trägheitstensor bestimmt. Das ist eine Matrix Θ, aus der man die Trägheitsmomente und die Hauptträgheitsachsen berechnen kann. Die Hauptträgheitsachsen sind die Richtungen, in denen der Drehimpuls und die Winkelgeschwindigkeit einander parallel sind.
, und den Trägheitstensor bestimmt. Das ist eine Matrix Θ, aus der man die Trägheitsmomente und die Hauptträgheitsachsen berechnen kann. Die Hauptträgheitsachsen sind die Richtungen, in denen der Drehimpuls und die Winkelgeschwindigkeit einander parallel sind.Der Drehimpuls eines starren Körper ist das Produkt seines Trägheitstensors mit seiner Winkelgeschwindigkeit
Der Trägheitstensor Θ hat für die Drehbewegung vergleichbare Bedeutung wie die Masse für die Translationsbewegung. Allerdings sind die Winkelgeschwindigkeit und der Drehimpuls im Allgemeinen nicht zueinander parallel.
Herleitung
Der Drehimpuls eines starren Körpers ist die Summe der Drehimpulse der Massepunkte, aus denen er besteht. Wir bezeichnen die einzelnen Massepunkte mit
 mit
mit  die Orte, an denen sie sich befinden, und mit
die Orte, an denen sie sich befinden, und mit  ihre Geschwindigkeiten. Der Drehimpuls ist insgesamt
ihre Geschwindigkeiten. Der Drehimpuls ist insgesamt .
.
Dabei ist über alle Massenpunkte zu summieren, aus denen der Körper besteht. Sein Schwerpunkt sei als Koordinatenursprung gewählt.
Wenn der Schwerpunkt ruht, so ist die Bewegung des starren Körpers eine Drehung um den Schwerpunkt. Die Geschwindigkeit der einzelnen Massepunkte ist dabei das Kreuzprodukt von Winkelgeschwindigkeit und Ortsvektor,
Eingesetzt erhalten wir
Das doppelte Kreuzprodukt werten wir mit der BAC-CAB-Formel aus,
Also ist der Drehimpuls
linear in der Winkelgeschwindigkeit und lässt sich daher als Trägheitstensor Θ mal in der Formschreiben. Dabei ist der Trägheitstensor die Matrix
Bei einer kontinuierlichen Massenverteilung steht statt der Summe über die Massepunkte ein Volumenintegral über die Massendichte
 , die je nach Matrixelement mit unterschiedlichen Produkten der Koordinaten gewichtet ist,
, die je nach Matrixelement mit unterschiedlichen Produkten der Koordinaten gewichtet ist,Siehe auch
- Pirouetteneffekt, Selbststeuerung, Stabilisierung, Reaktionsrad, Trägheitsrad, Stabilisation (Raumfahrt)
- Spin (interpretierbar als „Eigendrehimpuls“ in der Quantenmechanik)
- Drehimpulsoperator (allgemeiner Drehimpuls in der Quantenmechanik)
















Wikimedia Foundation.