- Laseraltimetrie
-
 Laserscanner zur 3D-Vermessung auf Stativ
Laserscanner zur 3D-Vermessung auf StativLaserscanning (auch Laserabtastung) bezeichnet das zeilen- oder rasterartige Überstreichen von Oberflächen oder Körpern mit einem Laserstrahl, um diese zu vermessen oder zu bearbeiten oder um ein Bild zu erzeugen.
Geräte, die den Laserstrahl entsprechend ablenken, heißen Laserscanner.
Inhaltsverzeichnis
Der Laserscanner
Ein Laserscanner besteht aus einem Scankopf und einer Treiber- und Ansteuerelektronik. Die Elektronik besteht aus einem leistungselektronischen Teil, der die Ströme für die Antriebe liefert, und aus einer z. B. auf einem PC oder eingebetteten System laufenden Scannersoftware, die die Treiberelektronik anspricht.
Bei Messanwendungen wird das Ergebnis des Scanvorganges von Sensoren über den gleichen oder einen getrennten optischen Weg empfangen und von der Scannersoftware erfasst, die auch die anderen Komponenten anspricht und kontrolliert.
 3D-Laserscanner
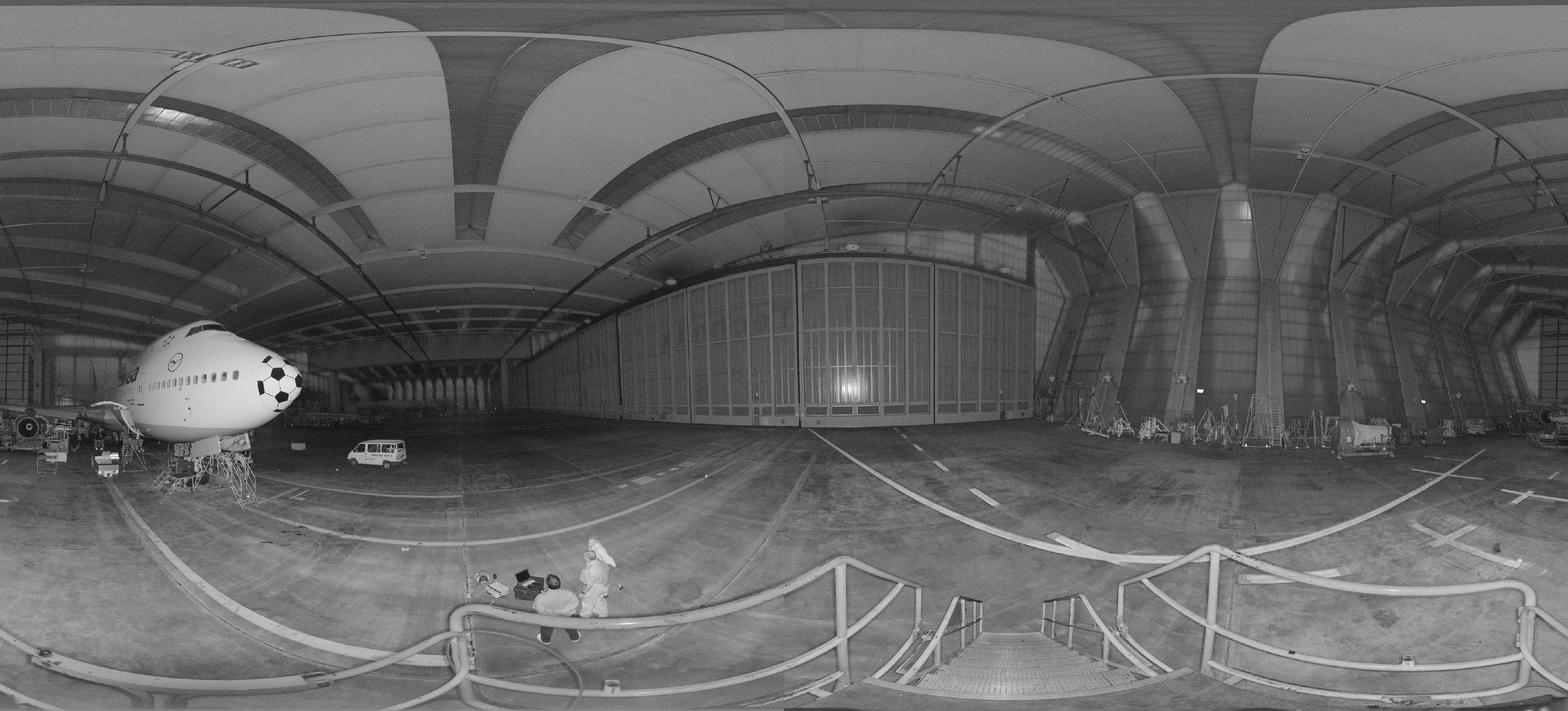
3D-Laserscanner Reflexionsbild des 3D-Scans einer Flugzeughalle
Reflexionsbild des 3D-Scans einer FlugzeughalleScankopf
Zum Erzeugen einer einzelnen Zeile wird der Winkel eines Spiegels verändert, an dem der Laserstrahl reflektiert wird. Das kann durch einen Galvanometerantrieb (kurz: Galvo) oder ein sich drehendes Spiegelprisma (Polygon) erfolgen, je nachdem, ob eine periodische (Zeile, Bild) oder eine frei programmierbare Bewegung (Vektorsteuerung) erforderlich ist.
Zur zweidimensionalen Ablenkung müsste ein Spiegel in zwei Richtungen ausgelenkt werden; um die Mechanik zu vereinfachen, werden jedoch meist zwei jeweils orthogonal zueinander bewegte Spiegel nahe beieinander aufgestellt, über die der Laserstrahl reflektiert wird. Die beiden Plan- bzw. Polygonspiegel werden von je einem Galvanometerantrieb oder einem Elektromotor angetrieben.
Es gibt auch Laserscanner, bei denen eine zusätzliche Feder und entsprechende Ansteuerung für eine resonante Drehschwingung sorgen.
Für einfache Showzwecke werden oft Planspiegel leicht verkippt auf einer Motorwelle montiert, sodass sich mit dem Lichtpunkt Lissajous-Figuren und Kardioiden erzeugen lassen
Des weiteren existieren Scanköpfe zum 3D-Lasermarkieren, die neben den zwei Spiegeln für X- und Y-Achse noch eine verstellbare Optik für die Tiefe, also die Z-Achse besitzen. Damit ist es möglich, den Laser auch in der dritten Dimension anzusteuern und auf einen bestimmten Punkt zu fokussierten.
Auch die Veränderung der Laserintensität oder die Justierung des Lasers kann mechanisch erfolgen.
Bei Laserprojektoren werden drei Laserstrahlen mit den drei Grundfarben rot, grün und blau in einem gemeinsamen Strahlengang über die zwei Spiegel geführt.
Mikrospiegelfelder werden in modernen Beamern eingesetzt und arbeiten prinzipiell wie viele einzelne kleine Laserscanner.
Anwendungsgebiete
Laseraltimetrie
Laseraltimetrie ist eine Methode der Geodäsie, bei der Objekte mit Hilfe von punktweisen Entfernungsmessungen erfasst werden. Es gibt terrestrisches Laserscanning, bei dem ein Messgerät z. B. vor einem Gebäude installiert und das Objekt damit punktweise abgetastet wird. Daneben gibt es das Luft gestützte Laserscanning Airborne Laserscanning, bei dem die Sensoren in einem Flugzeug oder Hubschrauber installiert werden. Dieses Verfahren dient im Allgemeinen zur Erfassung von Geländehöhen und Objekten auf dem Gelände und ersetzt zunehmend die klassische Photogrammetrie.
Bei der Entfernungsermittlung zum zu erfassenden Objekt können unterschiedliche Messprinzipen zum Einsatz kommen. Bei der Messung unter Ausnutzung der Lichtlaufzeit werden einzelne, kurze Laserpulse ausgesandt und die vom Objekt reflektierte Strahlung mit Sensor registriert. Die Zeit, die zwischen ausgesandten und empfangenen Pulsen liegt, ist ein Maß für die Entfernung zwischen der Sende- und Empfangseinheit. Alternativ kann eine Pulsfolge mit fester Frequenz ausgesandt und ihre Reflexion am zu vermessenden Objekt detektiert werden. Die Phasendifferenz zwischen ausgesandter und empfangener Pulsfolge ist ebenfalls ein Maß für die Entfernung.
Für eine korrekte Georeferenzierung der Entfernungsmessung ist es erforderlich, dass Position und Orientierung des Sensors im Raum zum Zeitpunkt der Messung bekannt sind. Im Falle des Luft gestützten Laserscanning wird dazu eine Kombination aus mindestens einem GPS-Empfänger und inertialem Navigationssystem (INS) verwendet. Hierbei ist es wichtig, dass die verschiedenen Messwerte der unterschiedlichen Sensoren synchron ermittelt oder über geeignete Verfahren zumindest synchronisiert werden können. Beim Luft gestützten Laserscanning lassen sich gemäß Herstellerangaben bzw. Dienstleistungsunternehmen unter günstigen Bedingungen (vegetationslose Flächen, schwache bis mittlere Geländeneigung) Genauigkeiten in der Höhe von 5–15 cm und in der Lage von 30 bis 50 cm erreichen.
Mittels geeigneter Verfahren lassen sich dann aus den Daten der Entfernungsmessung und der Komponente GPS/INS dreidimensionale kartesische Koordinaten der gemessenen Punkte ableiten.
Ein Laserscanner, der neben der dreidimensionalen Position (Koordinaten) auch die Intensität des reflektierten Signals erfasst, wird abbildender Laserscanner genannt. Die Aufnahme der Intensitätwerte des von den aufgenommenen Oberflächen reflektierten Laserlichtes erfolgt bei heutigen Lasermessystemen in 16-bit-Graustufen. Im Ergebnis erhält man ein Abbild der Oberflächen ähnlich dem eines Schwarzweißfotos.
2D-Laserscanning
 Detailansicht einer deutschen Lkw-Maut-Kontrollbrücke. Das rundliche Gerät auf der rechten Seite ist ein 2D-Laserscanner der Firma SICK.
Detailansicht einer deutschen Lkw-Maut-Kontrollbrücke. Das rundliche Gerät auf der rechten Seite ist ein 2D-Laserscanner der Firma SICK. 2D-Laserscanner der Firma SICK.
2D-Laserscanner der Firma SICK.Beim 2D-Laserscanning wird die Kontur von Gegenständen auf einer Ebene digital erfasst.
In Sicherheitssystemen wird 2D-Laserscanning benutzt um zu erkennen, ob Personen oder Gegenstände definierte (Gefahren-)Bereiche überschreiten um dann entsprechende Maßnahmen einleiten zu können (z. B. Abschaltung von Maschinen). 2D-Laserscanner werden auch eingesetzt um Objekte automatisch zu erkennen, so zum Beispiel auf den Lkw-Maut-Kontrollbrücken auf deutschen Autobahnen. Weitere Anwendungsgebiete sind die Erstellung von Karten in der Robotik sowie die Erkennung von Hindernissen bei autonomen mobilen Robotern.
3D-Laserscanning
Beim 3D-Laserscanning wird die Oberflächengeometrie von Gegenständen mittels Pulslaufzeit, Phasendifferenz im Vergleich zu einer Referenz oder durch Triangulation von Laserstrahlen digital erfasst. Dabei entsteht eine diskrete Menge von dreidimensionalen Abtastpunkten, die als Punktwolke bezeichnet wird. Die Koordinaten der gemessenen Punkte werden aus den Winkeln und der Entfernung in Bezug zum Ursprung (Gerätestandort) ermittelt.
Anhand der Punktwolke werden entweder Einzelmaße wie z. B. Längen und Winkel bestimmt oder es wird aus ihr eine geschlossene Oberfläche aus Dreiecken konstruiert (Vermaschung oder Meshing) und z. B. in der 3D-Computergrafik zur Visualisierung verwendet[1]. Das Scannen des menschlichen Körpers oder von Körperteilen ist auch unter dem Begriff Bodyscanning bekannt.
Der Einsatz des Laserscanning findet zunehmend in der Architekturvermessung mit Schwerpunkten in der Bauforschung und Denkmalpflege Anwendung. Insbesondere verformte und beschädigte Bauwerke mit räumlich komplizierten Strukturen können schnell und vollständig erfasst werden. Weitere Anwendungsgebiete sind beispielsweise der Rohrleitungs- und Anlagenbau, die Archäologie, der Denkmalschutz, Re-Engineering und Qualitätssicherung sowie der Tunnelbau, die Forensik und Unfallforschung.
Moderne Lasermesssysteme erreichen eine Punktgenauigkeit von bis zu 1 mm. Ein Laserscanner, dessen Entfernungsbestimmung nach dem Impuls- oder Phasenmessverfahren funktioniert, speichert zusätzlich die Reflektanz des reflektierten Laserlichtes ab. In Kombination mit einer Digitalkamera können die Punktwolken mit photorealistischen Texturen versehen werden.
Im Bereich der Laserscanner, die nach dem Phasendifferenzverfahren (Phasenmessverfahren) arbeiten, wurden in den letzten Jahren enorme Fortschritte insbesondere in Hinblick auf die Abtastrate erzielt. So erreichen aktuelle Geräte,wie zum Beispiel der FARO Photon 120, Messgeschwindigkeiten von deutlich über 900000 3D-Messpunkten pro Sekunde. Dabei wird, im Gegensatz zum Impulslaufzeitmessverfahren, ein kontinuierlicher Laserstrahl ausgesandt. Die Amplitude des ausgesandten Laserstrahls wird mit mehreren sinusförmigen Wellen unterschiedlicher Wellenlänge moduliert. Der entstehende zeitliche Abstand des empfangenen Signals gegenüber dem gesendeten Signal ist eine Folge der Entfernung zum Objekt. Bei gleichzeitiger Betrachtung der Phasenlage des gesendeten und des empfangenen Signals ergibt sich eine Phasendifferenz, die die Bestimmung des Objektabstandes erlaubt.
Konfokales Laserscanning
Ist ein spezielles dreidimensionales Laserscanning-Verfahren, das in der Mikroskopie (siehe Laser-Scanning-Mikroskop) und der Augenheilkunde (Scanning-Laser-Ophthalmoskop) eingesetzt wird. Das Prinzip des konfokalen Laserscanninges beruht darauf, dass ein fokussierter Laserstrahl über eine Probe gescannt wird (in der Mikroskopie wird manchmal stattdessen das Objekt selbst bewegt) und das zurückfallende Licht hinter einer kleinen Punktblende detektiert wird. Durch die Anordnung der Blende wird nur Licht aus der Brennebene detektiert und man erhält ein Schnittbild nur aus dieser Ebene. Wie dick diese Ebene ist, hängt von der Schärfentiefe des verwendeten Mikroskops ab. Ändert man zwischen einzelnen Aufnahmen die Fokussierung, so kann man einen ganzen Bildstapel aufnehmen und erhält so einen 3D-Datensatz (siehe auch Konfokalmikroskop).
Materialbearbeitung und Fertigung
Ist die Laserleistung ausreichend groß, kann die gescannte Oberfläche bearbeitet werden. Laserscanner werden insbesondere zum Gravieren, Schweißen und Härten eingesetzt. Auch beim Rapid Prototyping können Laserscanningverfahren zum Einsatz kommen, zum Beispiel, um einen Prototyp mit dem sog. Lasersinterverfahren aus lokal durch Lasererwärmung gesinterten Pulverschichten aufzubauen.
Ein weiteres Anwendungsgebiet ist das In-Glass-Marking, die Herstellung einer dreidimensionalen Struktur innerhalb eines Glaskörpers.
Barcodelesegerät
Siehe hierzu unter Barcodescanner.
Bildgebende Verfahren und Showtechnik
Hierbei werden Laserstrahlen verschiedener Farben im sichtbaren Wellenlängenbereich verwendet. Die Ablenkung geschieht mit Prismenspiegeln (zeilenweise Erzeugung eines Bildes ähnlich wie in einer Fernsehbildröhre) oder Galvanometerantrieben (Zeichnen von Figuren). Laserprojektoren verwenden drei Laserstrahlen der Grundfarben Rot, Grün und Blau und können durch getrennte Modulation der Teilstrahlen farbige Bilder projizieren.
Einzelnachweise
- ↑ C. Teutsch, Model-based Analysis and Evaluation of Point Sets from Optical 3D Laser Scanners, volume 1 of Magdeburger Schriften zur Visualisierung. Shaker Verlag, 2007. ISBN 978-3-8322-6775-9
Siehe auch
Weblinks
- Abbildende Laseraltimetrie
- DAVID-Laserscanner - Freeware-Programm und Wiki zum 3D-Laserscannen
- Model-based Analysis and Evaluation of Point Sets from Optical 3D Laser Scanners - Anwendung des 3D scannings in der optischen Messtechnik




Wikimedia Foundation.