- Model Predictive Control
-
Die Modellprädiktive Regelung, zumeist Model Predictive Control (MPC) oder auch Receding Horizon Control (RHC) genannt, ist eine moderne Methode zur prädiktiven Regelung von komplexen Prozessen.
Inhaltsverzeichnis
Funktionsweise
 Beispielhaftes zeitdiskretes MPC Modell
Beispielhaftes zeitdiskretes MPC Modell
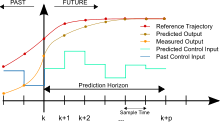
Beim MPC wird ein zeit-diskretes dynamisches Modell des zu regelnden Prozesses verwendet, um die zukünftigen Zustände des Prozesses in Abhängigkeit von den Eingangssignalen zu berechnen und aufgrund dieser Vorhersage geeignete Eingangssignale zu wählen. Dies ermöglicht die Berechnung des - im Sinne einer Gütefunktion - optimalen Eingangssignales unter der gleichzeitigen Berücksichtigung von Eingangs- und Zustandsbeschränkungen. Während das Modellverhalten bis zu einem bestimmten Zeithorizont N prädiziert wird, wird in der Regel nur das Eingangssignal u für den nächsten Zeitschritt verwendet und danach die Optimierung wiederholt. Dabei wird die Optimierung im nächsten Zeitschritt mit dem dann aktuellen (gemessenen) Zustand durchgeführt, was als eine Rückkopplung aufgefasst werden kann und die MPC im Gegensatz zu Optimalsteuerungen zu einer Regelung macht. Dies erlaubt die Berücksichtigung von Störungen, erfordert aber auch eine erhebliche Rechenleistung.


Neben den zumeist linearen Prozessmodellen werden gelegentlich künstliche neuronale Netze verwendet, um ein Prozessmodell zu erstellen. Diese Regler gehören dann zur Klasse der NMPC (Non-Linear Model Predictive Control), wie auch Formen von adaptiven Reglern.
Anwendungsgebiete
Im Gegensatz zu vielen anderen modernen Regelungsverfahren wurde MPC aufgrund seiner Fähigkeit, Beschränkungen explizit zu berücksichtigen, bereits vielfach in der Industrie angewendet. MPC-Regler werden bevorzugt in verfahrenstechnischen Prozessen (auch Verbrennungsprozesse in Kraftwerken, Müllverbrennungsanlagen, Papiermaschinen, Walzwerken und Zementwerken) genutzt, in welchen klassische Regler (P-, D-, PID-Regler) und Fuzzy-Regler eine nicht ausreichende Regelgüte erlangen, und die relevanten Systemdynamiken langsam genug sind, um eine Optimierung in jedem Abtastschritt durchführen zu können.
Varianten
- Move Blocking
- Explizites MPC
- Minimum-time MPC
- Infinite horizon MPC
Siehe auch
Literatur
- Rainer Dittmar, Bernd-Markus Pfeiffer: Modellbasierte prädiktive Regelung: Eine Einführung für Ingenieure (2004), Oldenbourg ISBN 3486275232
- Jan M. Maciejowski: Predictive Control with Constraints (2002), Prentice Hall, ISBN 0-201-39823-0
- M. Morari und N. L. Ricker: Model Predictive Control Toolbox User's Guide (1995), The Mathworks Inc.
- M. Rau: Nichtlineare modellbasierte prädiktive Regelung auf Basis lernfähiger Zustandsraummodelle (PDF-Datei; 4,75 MB)

Wikimedia Foundation.