- Signalflussgraf
-
Der Signalflussgraph ist die Darstellung der Signalverarbeitung in einem System durch gerichtete und gewichtete Graphen. Die Knoten sind Signale und die Kanten beschreiben die Verarbeitung des Signals mittels des Kantengewichts (Operator). Die Richtung der Kante bezeichnet den Signalfluss. Signalflussgraphen stellen nicht die physikalisch-technische Struktur des Systems dar. Vom Signalflussplan unterscheiden sie sich durch die Bedeutung der Knoten und Kanten.
Inhaltsverzeichnis
Begriffe
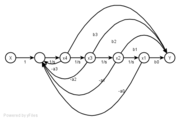
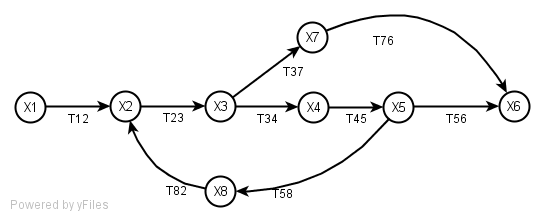
 Bild 1: Beispiel Signalflussgraph
Bild 1: Beispiel SignalflussgraphSignalflussgraphen sind formal definiert. Deshalb zunächst einige Begriffsdefinitionen.
- Ein Pfad ist eine zusammenhängende Folge von Verbindungen (Kanten) zwischen Knoten in einer Richtung. Im Beispiel ist (X3->X4->X5) ein Pfad.
- Ein Eingangsknoten hat nur ausgehende Pfade. X1 ist Eingangsknoten.
- Ein Ausgansknoten hat nur eingehende Pfade. X6 ist Ausgangsknoten.
- Ein Vorwärtspfad führt in Richtung Ausgangsknoten. (X2->X3->X4) und (X3->X7->X6) sind Vorwärtspfade.
- Ein Rückwärtspfad führt in Richtung Anfangsknoten. Endknoten ist. (X5->X8->X2) ist ein Rückwärtsknoten.
- Eine Rückkopplungsschleife liegt vor, wenn Anfangsknoten und Endknoten gleich sind. (X2->X3->X4->X5->X8->X2) ist eine Rückkopplungsschleife.
- Eine selbstbezogene Schleife ist ein Pfad der direkt zum Ausgangsknoten führt.
Bild 1 zeigt einen allgemeinen gerichteten, gewichteten Graphen im mathematischen Sinn. Zum Signalflussgrafen wird er erst durch folgende Vereinbarungen:
- Ein Knoten stellt ein Signal dar.
- Eine Kante stellt über ihr Gewicht die Verarbeitung des Signals dar. Sie Erzeugt also ein neues Signal.
Weiterhin gilt:
 sind statische Signale.
sind statische Signale. sind kontinuierliche Signale.
sind kontinuierliche Signale. sind deren Laplace-Transformierte.
sind deren Laplace-Transformierte. sind diskrete Signale.
sind diskrete Signale. sind deren Z-Transformierte.
sind deren Z-Transformierte.
 sind Übertragungsfaktoren.
sind Übertragungsfaktoren. sind kontinuierliche Impulsantwortfunktionen.
sind kontinuierliche Impulsantwortfunktionen. sind kontinuierliche Übertragungsfunktionen.
sind kontinuierliche Übertragungsfunktionen. sind diskrete Impulsantwortfunktionen.
sind diskrete Impulsantwortfunktionen. sind diskrete Übertragungsfunktionen.
sind diskrete Übertragungsfunktionen.
Elemente eines Signalflussgraphen
Die Addition erfolgt im Zielknoten.





Die Multiplikation mit einer Konstanten wird unter anderem für die Verarbeitung der Koeffizienten einer Differenzialgleichung verwendet.





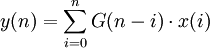
Die Faltung ist ein allgemeines Übertragungsglied.



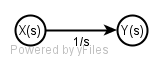
Den Integrator gibt es nur in zeitlich kontinuierlichen Systemen.
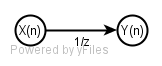
Das Verzögerungsglied gibt es nur in zeitlich diskreten Systemen.


Grundschaltungen
Für Signalflussgrafen gelten gleiche Regeln wie für Signalflusspläne. Der einzige Unterschied ist die grafische Darstellung. Auf eine Darstellung der Beziehungen im Zeitbereich wurde hier verzichtet, da diese zu unübersichtlich sind. Die Verhältnisse sind im Bildbereich wesentlich einfacher. Mit den Grundschaltungen können komplexe Signalflussgraphen umgeformt, und damit vereinfacht, werden.
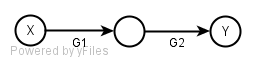
Reihenschaltung



Parallelschaltung




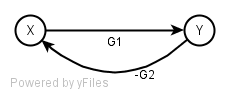
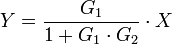
Rückkopplung


Erstellen von Signalflussgraphen
Aus der Differentialgleichung
 Differentialgleichung 4. Ordnung
Differentialgleichung 4. OrdnungGegeben sei die gewöhnliche, lineare, inhomogene Differenzialgleichung mit konstanten Koeffizienten 4. Ordnung

Wir führen die 4 Zustandsgrößen

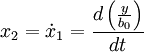
ein. Damit kann die Differenzialgleichung 4. Ordnung in ein System von 4 Differenzialgleichungen 1. Ordnung

und

mit der Ausgangsgleichung

überführt werden. Wir brauchen also eine Reihenschaltung von 4 Integratoren im Vorwärtspfad des Signalflussgrafen. Die Multiplikation mit den Koeffizienten
 erfolgt in den zum Summations-Knoten führenden Rückwärtspfaden.
erfolgt in den zum Summations-Knoten führenden Rückwärtspfaden.Aus der Übertragungsfunktion
 Übertragungsfunktion 4. Ordnung
Übertragungsfunktion 4. OrdnungGegeben sei die Übertragungsfunktion
 .
.Nach Multiplikation von Zähler und Nenner mit
 hat die Übertragungsfunktion eine Form aus der sofort die benötigten Integratoren ersichtlich sind.
hat die Übertragungsfunktion eine Form aus der sofort die benötigten Integratoren ersichtlich sind.
Im Zähler stehen die Faktoren des Vorwärtspfades und im Nenner die des Rückwärtspfades. Damit kann der Signalflussgraph direkt gezeichnet werden.
Aus dem Signalflussplan
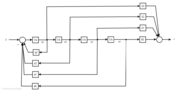 Signalflussplan einer Übertragungsfunktion 4. Ordnung
Signalflussplan einer Übertragungsfunktion 4. OrdnungDurch Vertauschung von Knoten und Kanten erhält man aus dem Signalflussgraphen den Signalflussplan und umgekehrt.
Software
Es gibt einige Programme zur Erstellung von Signalflussgraphen. In diesem Beitrag wurde das freie Programm yEd von yWorks benutzt. Es ermöglicht das Zeichnen von Graphen mit verschieden Knotenformen (z. B. Kreis, Rechteck) und Kanten (Bogen oder Linienzug). Eine Simulation des Systems ist damit im Gegensatz zum den Signalflussplan nutzenden Programm Simulink nicht möglich.

Wikimedia Foundation.