- Tourenmotorrad
-
 Honda CBR600RR
Honda CBR600RRDas Motorrad (amtliche Bezeichnung in Deutschland: Kraftrad, Kurzform bei deutschen Behörden und als Selbstbezeichnung der „Kradler“: Krad) ist ein einspuriges Kraftfahrzeug oder Zweirad, üblicherweise mit einem bis zwei Sitzen. Am 1. Januar 2008 waren in Deutschland insgesamt 3,57 Millionen Krafträder zugelassen[1].
Inhaltsverzeichnis
Geschichte
 Gottlieb Daimlers Reitwagen von 1885 (Nachbau)
Gottlieb Daimlers Reitwagen von 1885 (Nachbau) Motorrad der Marke Cyklon um 1900
Motorrad der Marke Cyklon um 1900Die Erfindung wird Karl Drais zugeschrieben, der 1817 eine Laufmaschine als Ersatz für Pferde erfand. Schon 1820 schrieb er, dass er Pferde „durch die Dampfmaschine selbst noch mehr zu übertreffen getraue.“
Beim nächsten Entwicklungsschub fuhren Dampfmotorräder in Frankreich und den USA. Louis Perreaux’ Dampfveloziped als Zweirad 1871 (patentiert seit 1868) ist erhalten, für das Dreirad gab es 1878 einen Verkaufskatalog. Wie viele Fahrzeuge verkauft wurden, ist nicht bekannt. In Roxbury, Massachusetts, baute um 1870 Sylvester Roper mehrere Dampfvelozipede und stellte sie gegen Eintritt aus.
Erstes Serien-Benzinmotorrad ist die Hildebrand und Wolfmüller von 1894. Zwar gab es von Gottlieb Daimler bereits 1885 den „Reitwagen“ als Versuchsträger und Einzelstück, dieser war aber wegen der seitlichen Stützräder eigentlich kein Motorrad. Durch Hildebrand & Wolfmüller findet auch erstmals der Begriff „Motorrad“ in der deutschen Sprache Anwendung.
Motorräder in industriellem Maßstab wurden zuerst von Indian in den USA hergestellt.
Mit den technischen Verbesserungen
- Spritzdüsenvergaser (Patent von Wilhelm Maybach, 1893) und der
- Magnetzündung (Patent von Robert Bosch 1901)
wurde das Motorrad wirklich fahrbar.
Wesentliche Entwicklungen gingen aus von
- Frankreich − durch den Motoreinbau im Rahmen durch die Gebrüder Werner seit 1899,
- Belgien − durch das Vierzylindermotorrad und die Kardanwelle der Firma FN seit 1904,
- England − durch den Kickstarter, Bremse sowie Zweitaktmotor von Scott seit 1908,
- USA − durch den elektrischen Anlasser und die elektrische Beleuchtung von Indian seit 1914 und
- Deutschland (NSU, BMW, DKW, MZ ).
- Italien − (Aprilia, Ducati, Moto Guzzi)
Bis zum Ersten Weltkrieg war Indian die weltweit größte Motorradfabrik. Danach wurde dieser Titel weitergegeben an Harley Davidson, ab 1928 an DKW und nach dem Zweiten Weltkrieg an NSU. Seit dem Anfang der 1970er Jahre bis heute (Stand 2007) ist Honda, Japan, der weltgrößte Motorradproduzent. Honda konstruierte auch mit dem Kleinmotorrad Honda Super Cub das weltweit erfolgreichste Kraftfahrzeug, das seit den 1950er Jahren bis heute in vielen Fertigungsstätten und Lizenzbetrieben in weit mehr als 40 Millionen Exemplaren gebaut wurde.
Honda stellte 1969 mit der CB 750 Four ein richtungsweisendes Motorrad mit einem quer eingebauten Vierzylinder-Viertaktmotor vor, nachdem bereits Gilera seit den 1930er Jahren mit einer Rennmaschine dieses Konzept sehr erfolgreich eingeführt hatte. Auch MV Agusta stellte seit 1966 Motorräder dieser Bauweise her, konnte sich jedoch nie am Massenmarkt durchsetzen und blieb ein Kleinserienanbieter auf hohem Preisniveau.
Als mächtigste der in Serie gefertigten Motorräder gelten die US-amerikanischen Boss-Hoss-Modelle mit V8-Automotoren, über 5 Litern Hubraum und mehr als 225 kW Leistung. Als längstes Motorrad gilt die dreisitzige Böhmerland.
Nach den schlechten Verkaufszahlen von Motorrädern als Folge der steigenden Popularität des Automobils Ende der 1950er Jahre wurde Motorradfahren erst in den 1970ern als Freizeittrend wiederentdeckt. Motorradmarken wie Triumph und MV Agusta erlebten ihre Wiederauferstehung.
Besondere Bauarten
Killinger & Freund Motorrad, eine Zweiradkonstruktion mit Frontantrieb, Baujahr 1938. Ein weiteres Beispiel für diese Bauform ist die Megola.
Sonderformen mit drei Rädern werden den Motorrädern zugeordnet, da sie in der klassischen Form Motorräder mit Beiwagen oder Seitenwagen sind und teils auch getrennt werden können.
Trikes und Quads zählen nicht zu Motorrädern, in Deutschland können sie mit dem Autoführerschein gefahren werden.
Mofas (Motorfahrrad), Mopeds (Motorpedalfahrzeug), Mokicks, und Leichtkrafträder sind motorisierte Zweiräder, die eine geringe Leistung (ab 1 kW) und geringere Führerscheinvoraussetzungen haben. Mofas sind darüber hinaus mit Pedalen ausgerüstet.
Technik
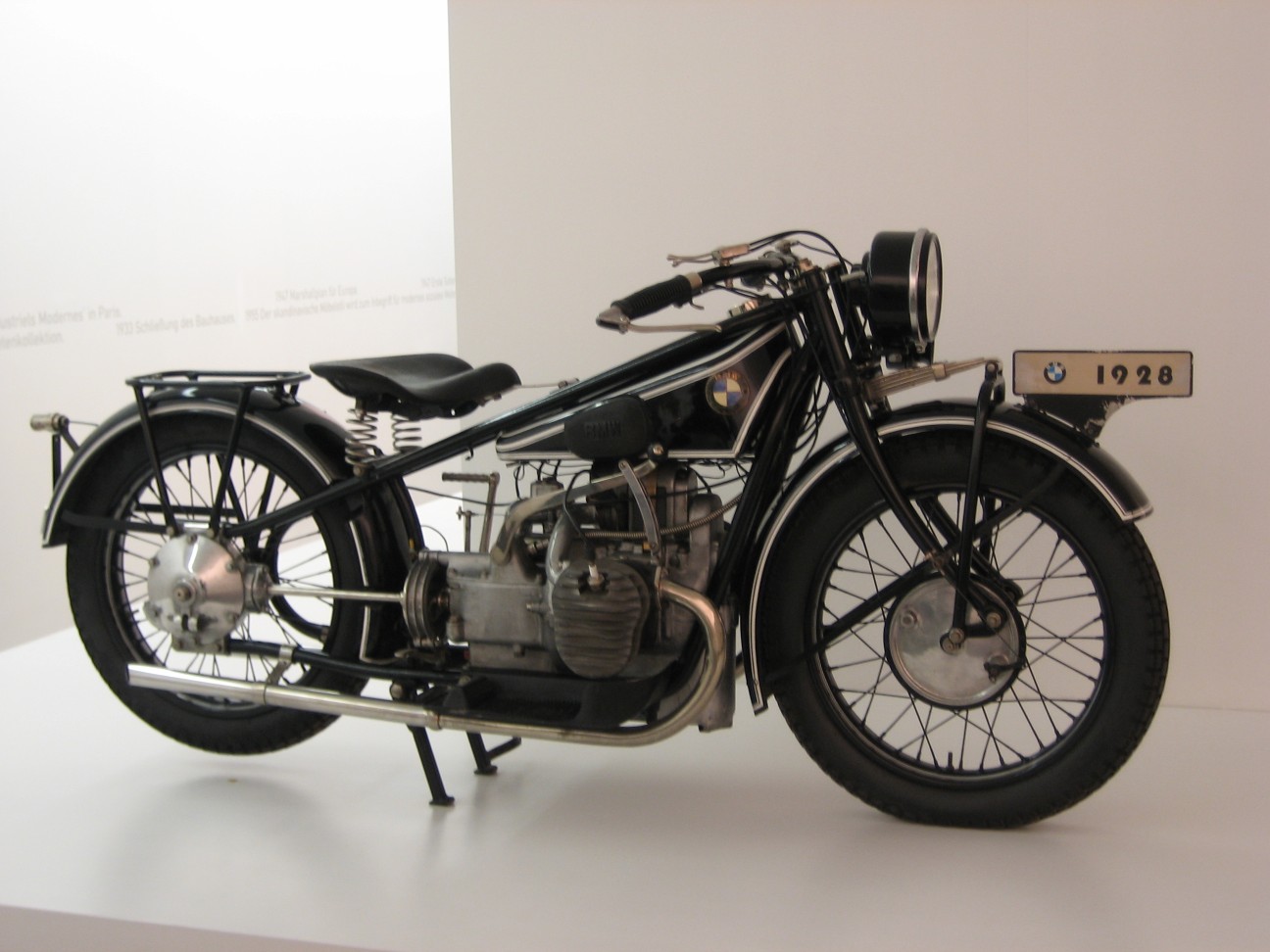
 BMW R 52, 1928
BMW R 52, 1928 Indian Chief, Baujahr 1947
Indian Chief, Baujahr 1947Der Antriebsmotor ist in den meisten Fällen ein Viertakt-Ottomotor, seltener ein Zweitaktmotor. Zweitaktmotoren werden zunehmend seltener, weil sie Geräusch- und Abgasregelungen nur unzureichend erfüllen. Motorräder haben typischerweise einen bis vier Zylinder; Zweizylindermotoren sind überwiegend als Reihenmotoren oder V-Motoren, seltener als Boxermotoren angeordnet, Drei- und Vierzylindermotoren sind fast immer Reihenmotoren.
Maschinen mit untypischen Motoren sind die Honda-Modelle PanEuropean und VFR mit Vierzylinder-V-Motor und einzelne Modelle von Honda, Kawasaki und Benelli mit sechs Zylindern in Reihenanordnung, die BMW-K100/K1100-Reihe mit liegendem Vierzylinder, die Honda Goldwing mit Vier- oder Sechszylinder-Boxermotoren, die Boss-Hoss-Modelle mit acht Zylindern in V-Anordnung und verschiedene Wettbewerbsfahrzeuge mit drei Zylindern (zwei Zylinder stehend, ein Zylinder liegend, DKW-Rennmaschine, Spitzname „Singende Säge“). Außergewöhnlich sind die Megola mit einem Fünfzylinder-Umlaufmotor im Vorderrad sowie die Hercules K2000, die Suzuki RE 5, die Norton TT und die Van Veen OCR mit Wankelmotoren.
In neuerer Zeit waren, ausgehend zunächst von Europa, auch Umbauten von Motorrädern mit Dieselmotoren zunächst im Kommen (meist Enfield India mit Einbaumotoren süddeutscher und italienischer Hersteller), bis ihnen die EU-Zulassungsvorschriften zum Geräuschverhalten zuwiderliefen.
Mit Dieselmotoren umgebaut entstanden die Modelle
- Taurus 325/Centaurus 851 und
- Sommer-Hatz-Diesel,
- bis schließlich der indische Hersteller des Basismotorrads selbst mit einer Enfield Diesel an den Markt ging.
- Hercules brachte in den späten 1970er Jahren erstmals ein Mofa mit Elektroantrieb heraus, das sich aber am Markt genauso wenig etablieren konnte wie eine gewisse Anzahl von immer wieder versuchten Neubelebungen dieser Antriebsart.
Ein gänzlich anderes Antriebskonzept ist die Wellenturbine:
Andere alternative Antriebe, wie Wasserstoffmotoren, Solarmotoren, Hybridantriebe o. ä. wurden bislang (Stand 2007) noch nicht in Motorradrahmen eingebaut.
In den meisten Fällen wird die Motorleistung mit einer Kette auf das Hinterrad übertragen. Daneben werden als wartungsärmere Alternativen Kardanwellen oder Zahnriemen benutzt. Der Nachteil der Kardanwelle ist zum einen das höhere Gewicht, zum anderen auch durch Lastwechsel bedingte Aufstellmomente, die allerdings durch Einbau einer Momentabstützung (z. B. Paraleverstrebe) abgefangen werden können. Dies erhöht jedoch wiederum das ohnehin hohe Gewicht des Kardanantriebs, weswegen bei sportlichen Motorrädern fast immer Kettenantrieb verwendet wird. Diese Art der Kraftübertragung hat aber auch spezifische Nachteile, wie die Pflegebedürftigkeit (Spannen und Schmieren) sowie den Verschleiß von Antriebsritzel, Kettenrad und Kette. Seit den 1960er Jahren ist bekannt, dass der Endantrieb mit den geringsten Verlusten ein Kettenantrieb ist, der vollständig gekapselt im Ölbad läuft. Dieser wird jedoch kaum gebaut und gilt wegen der Optik als „unsportlich“.
Das Vorderrad wird nur bei sehr wenigen Modellen zusätzlich angetrieben. Bereits seit über 40 Jahren gibt es Allrad-Motorräder der Marke ROKON (USA), bei denen beide Räder durch Ketten angetrieben werden.
Bedient wird ein Motorrad mit Händen und Füßen, jedoch ist die Anordnung der Bedienelemente anders als beispielsweise beim PKW. Am weitesten verbreitet ist folgende Kombination: Die Gangschaltung wird mit dem linken Fuß bedient, die Kupplung mit der linken Hand, das Gas mit der rechten Hand (Drehgriff), ebenso wie die Vorderradbremse (Bremshebel), während die Hinterradbremse mit dem rechten Fuß bedient wird. Der Blinkerschalter ist meist links zu finden, während die Schalter für die Beleuchtung oft auch rechts sind.
 Harley-Davidson mit Handschaltung links am Tank und Fußkupplung; links am Lenker der Handbremshebel
Harley-Davidson mit Handschaltung links am Tank und Fußkupplung; links am Lenker der HandbremshebelUnterschiedliche Bedienungsvarianten finden sich insbesondere in der Getriebebetätigung. Normalerweise wird der erste Gang durch Druck von oben auf den linken Fußschalthebel eingelegt; die anderen Gänge werden mit stufenweisem Hochziehen des Schalthebels erreicht. Der Schalthebel federt nach einem Schaltvorgang jeweils in Mittellage zurück. Der Leerlauf befindet sich in der Mitte zwischen erstem und zweitem Gang. Abwandlungen hiervon baut Kawasaki, bei der der Leerlauf, eigentlich folgerichtig, „unter“ dem ersten Gang liegt. Viele italienische Motorräder hatten ein umgekehrtes Schaltschema; der erste Gang wird nach oben eingelegt, die höheren Gänge nach unten. Bis in die 1970er-Jahre war auch bei italienischen und englischen Motorrädern die Schaltung rechts (mit „umgekehrtem“ Schema) und die Fußbremse links anzutreffen. In noch früheren Jahren waren Handschalthebel am Tank verbreitet, bei manchen Modellen mit Fußkupplungen kombiniert.
Bis in die 1950er Jahre gab es an Motorrädern noch die manuelle Verstellung des Zündzeitpunktes anzutreffen, mit einem Drehgriff am linken Lenkerende.
Ein Motorrad zeichnet sich durch ein im Verhältnis zum PKW niedrigeres Leistungsgewicht aus. Die Motorleistung muss so weniger Masse beschleunigen. Relativ hohe Beschleunigungswerte sind die Folge (z. B.: 0−100 km/h in knapp über 3 Sekunden).
Die leistungsstärksten modernen Serienmotorräder können Höchstgeschwindigkeiten über 300 km/h erreichen. Wegen des gegenüber Pkw geringeren Luftwiderstandes können diese Geschwindigkeiten mit Motorleistungen erreicht werden, die deutlich unter denen liegen, die für Pkw nötig wären. In Europa haben sich die Importeure und Hersteller 2002 eine freiwillige Geschwindigkeitsobergrenze von 299 km/h auferlegt, um einer gesetzlichen Regulierung entgegenzuwirken.
Inzwischen werden für zahlreiche Motorräder Fahrassistenzsysteme wie an Autos angeboten, so das ABS und Verbundbremsen; und ab 2007 auch die Antriebsschlupfregelung (Automatic Stability Control - ASC) bei BMW-Motorrädern.[2]
Motorräder entwickeln je nach Fahrweise mehr Verkehrslärm als PKW, bei denen vorwiegend die Abrollgeräusche als störend wahrgenommen werden, während hier die Motor- und Ansauggeräusche des freiliegenden Antriebsaggregats eher wahrgenommen werden. Auch sind die Frequenzbereiche aufgrund der Drehzahlen teils höher und dem menschlichen Ohr unangenehmer.
Typen
 Verschiedene moderne Motorräder
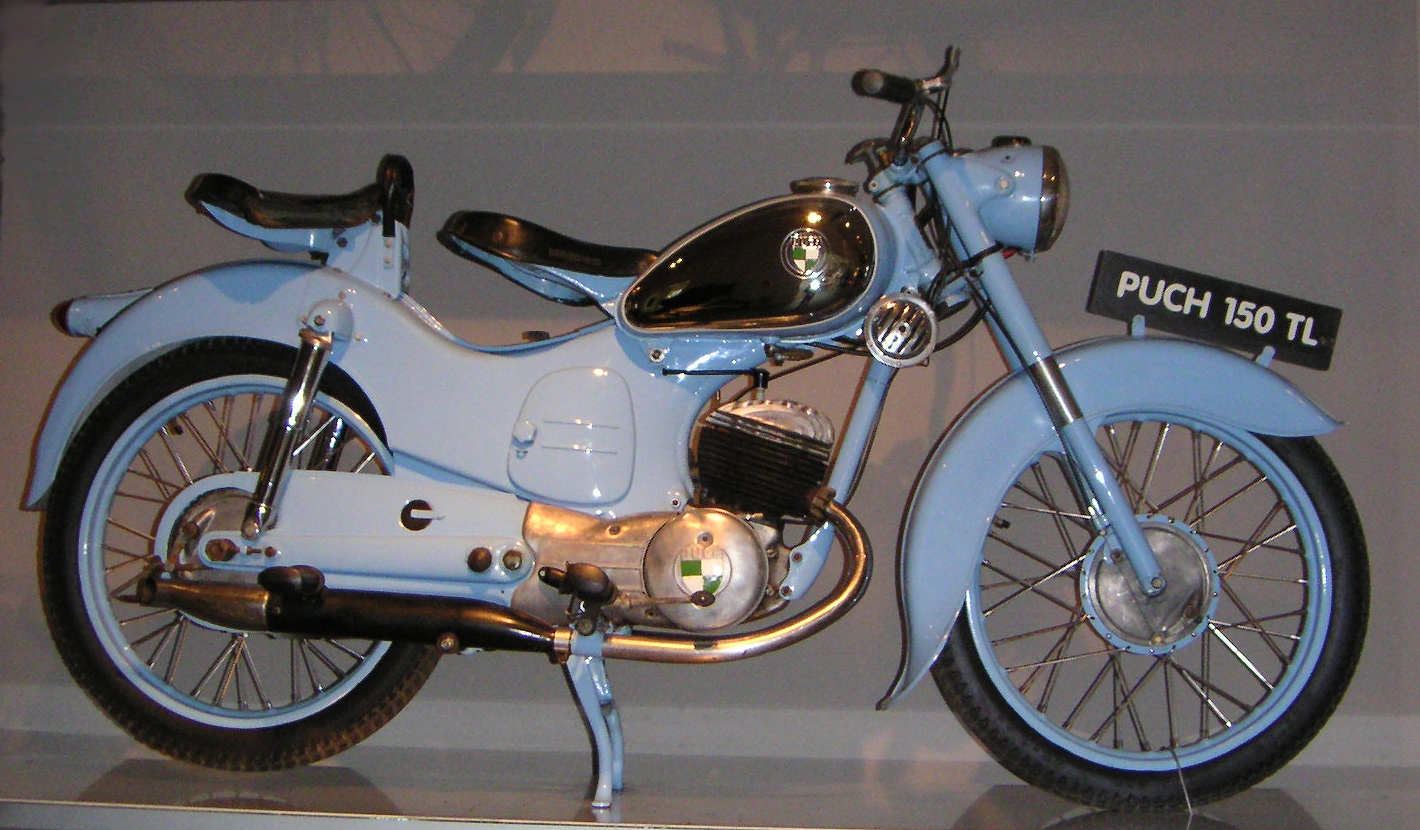
Verschiedene moderne Motorräder Puch 150 TL, 1953
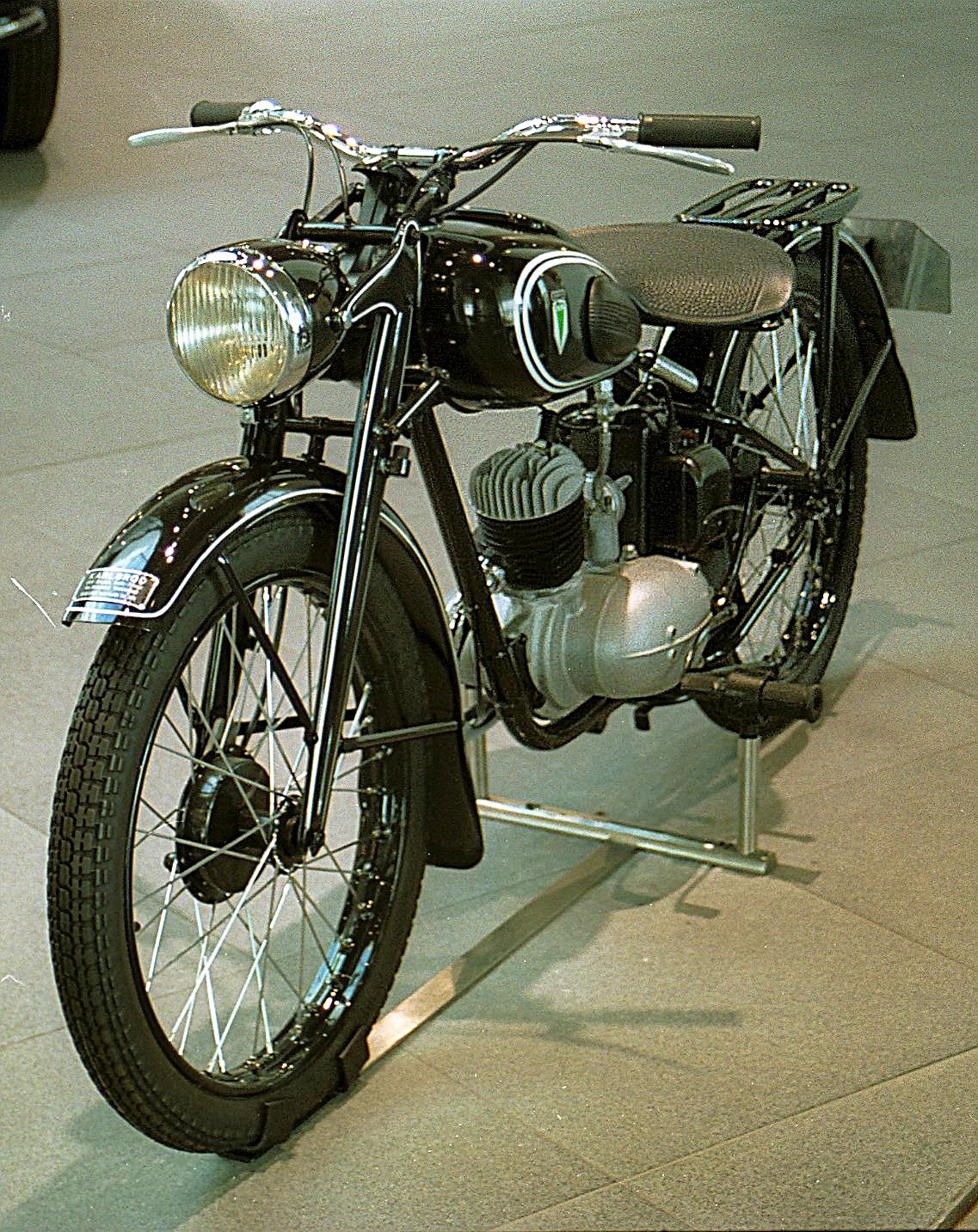
Puch 150 TL, 1953 Das meist kopierte Motorrad: eine DKW RT 125, 1939–1965
Das meist kopierte Motorrad: eine DKW RT 125, 1939–1965Nach Einsatz und Charakteristik werden Motorräder in Typen unterteilt:
- Motorroller (sog. Scooter)
- Straßenmotorräder (ausschließlich oder überwiegend für den Einsatz auf der Straße konzipierte motorisierte Zweiräder)
- Geländemotorräder (ausschließlich oder überwiegend für den Geländeeinsatz konzipierte motorisierte Zweiräder)
- Sonderformen
- Custombike
- Dragster
- Gespann
- Lastenmotorrad
- Pocket Bike
- Ratbike
- Steherrennen-Motorrad
- Steilwand-Motorrad
Motorradfahren
Nach dem Zweiten Weltkrieg heimkehrende amerikanische Flugzeugbesatzungen, Bomber und Piloten schlossen sich teils zu Motorradgruppen zusammen (in Kalifornien die Hells Angels), um gegen die etablierte Gesellschaft zu protestieren (siehe auch: Rocker). Filme wie Easy Rider von 1969 haben gesellschaftliches Außenseitertum und Motorradfahren romantisch verarbeitet.
Motorradfahrer schließen sich häufig in losen oder organisierten Gruppen oder Clubs zusammen.
Motorradreisen (Touren) sind eine beliebte Tätigkeit der Motorradfahrer. Verbreitet sind Motorradreisen mit mehreren Fahrzeugen oder mit Sozius/Sozia. Sie werden meistens selbst organisiert; typischerweise wird dabei das Gepäck selbst mitgeführt. Es werden aber auch organisierte Motorradreisen angeboten, bei denen häufig das Gepäck auf Begleitfahrzeugen mitgeführt wird. Für Motorradreisen wurden spezielle Motorradarten entwickelt: der Tourer (Tourenmaschine) und der Sporttourer.
Im Jargon wird Motorradfahren zuweilen als Ausritt bezeichnet.
Es gibt Cruiser (Genussfahrer), Tourenfahrer, Sportfahrer und einen harten Kern der Alltagsfahrer, die jeden Weg bei jedem Wetter mit dem Motorrad zurücklegen.
Seit den 1980er Jahren finden in vielen Städten zur Sommerzeit große Motorradgottesdienste (MOGO) statt, die mit einer gemeinsamen Konvoifahrt ins Umland enden.
Motorradfahrer grüßen sich häufig unterwegs mit Handzeichen; diese Geste ist Ende der 1950er Jahre entstanden, als man „unter sich“ war. In Ländern mit Linksverkehr erfolgt der Gruß üblicherweise durch Kopfnicken, da hier sonst die rechte Hand vom Gasgriff genommen werden müsste. In einigen Ländern, so zum Beispiel in Frankreich, ist es üblich, dass Überholende durch Ausstrecken oder Heben des rechten Beines grüßen.
Zum Motorradfahren auf öffentlichen Straßen, Plätzen und Wegen ist eine ausreichende Fahrerlaubnis (je nach Motorleistung) erforderlich. In Deutschland sind es die Klassen A (offen, ab dem 25. Lebensjahr oder nach 2 Jahren, wenn dieser als A (begrenzt) erworben wird), A (begrenzt, ab dem 18. Lebensjahr; max. 25 kW und nicht mehr als 0,16 kW/kg Leergewicht) oder A1 (ab dem 16. Lebensjahr; max. 11 kW und 80 km/h), oder die (weiterhin gültigen) Klassen 1 (unbegrenzt) oder 1a (begrenzt) bzw. 3 (vor dem 1. April 1980, Bestandsschutz für 125 cm³). Motorrad fahren lernt man zwar in den Grundzügen in einer Fahrschule − richtiges Beherrschen des Fahrzeuges aber erst durch genügend Fahrpraxis unter Anleitung von erfahrenen Fahrern. Der Besuch eines Fahrtrainings ist wegen der erhöhten Gefährdung noch mehr als bei PKW empfehlenswert.
Die Motorradindustrie klagt in Deutschland und Europa heute über rückläufige Absatzzahlen. Gründe liegen in den hohen Anschaffungs- und Betriebskosten, die Motorradfahren für junge Fahrer mittlerweile oft unerschwinglich machen. Auch die gestiegenen Freizeitangebote führen nicht mehr automatisch zum Motorrad. Viele junge Menschen werden durch die Eltern vom Motorradfahren abgehalten, die es als zu riskant ansehen. Positiver Nebeneffekt der reiferen Fahrer und der sicheren und gut gewarteten Maschinen sind stark rückgängige Unfallzahlen, was sich auch in rückläufigen Versicherungsprämien bemerkbar macht. Die Zahl der bei Verkehrsunfällen ums Leben gekommenen Motorradfahrer sank in Deutschland von 946 im Jahre 2003 auf 793 im Jahre 2006.
Das Durchschnittsalter der deutschen Motorradfahrer liegt bei 42 Jahren (Stand 2008) und steigt beständig weiter an. Das erklärt die Tendenz sowohl zu hochpreisigen Maschinen als auch zu sogenannten „Sofa-Rollern“ mit großvolumigen Motoren (z. B. Suzuki Burgman 650 mit 41 kW).
Namensgebung
 Krad-Schützen auf dem Balkan
Krad-Schützen auf dem BalkanIn der deutschen Amtssprache (Zulassungsstelle usw.) gilt die Bezeichnung Kraftrad, in der Zeitungslandschaft und im militärischen und journalistischen Sprachgebrauch hat sich bis heute die Kurzform Krad gehalten. In der Schweiz lautet die offizielle Bezeichnung Motorrad.
Offene dreirädrige Fahrzeuge (mit symmetrischer Radanordnung, d. h. kein Gespann) werden allgemein als Trike bezeichnet, hierfür wird ein Führerschein der Klasse B, sofern das Fahrzeug nicht in die Klasse S (45km/h aus 50 cm³) fällt. Andere Bezeichnungen für „Motorrad“, teils Insiderjargon, sind unter anderem: Bock, Hobel, Ofen, Bike, Karre, Moped (als Verniedlichung auch bei großem Gewicht), Möp, Töff; Letzteres überwiegend in der Schweiz, wo Töff die allgemein übliche umgangssprachliche Bezeichnung für ein Motorrad ist.
Die scherzhafte Bezeichnung Joghurtbecher wird für eine Verkleidung aus Kunststoff bzw. GFK oder gleich das ganze damit versehene Motorrad gebraucht, insbesondere wenn es einen billigen Eindruck macht (rückseitig offen). Diese Bezeichnung wird seit den 1980er Jahren vor allem auf sportliche Motorräder aus Japan angewandt. Der Begriff entstand, als Anfang der 1980er Jahre die ersten Vollverkleidungen an Sportmotorrädern aufkamen, welche sich optisch stark von den in den 1970ern vorherrschenden Naked Bikes unterschieden.
Physikalische Grundlagen des Motorradfahrens
Allgemeines
Die häufig benutzte Erklärung, das Motorrad werde durch die Kreiselkräfte der rotierenden Räder stabilisiert, ist zwar richtig, jedoch nicht vollständig. Im Geschwindigkeitsbereich unter etwa 30 km/h sind die Kreiselmomente, je nach Bauart, sehr klein und reichen für eine vollständige Stabilisierung gar nicht aus. Damit stellt das Motorrad als Einspurfahrzeug mit dem Fahrer ein immanent labiles System um die Längsachse dar.
Im unteren Geschwindigkeitsbereich wird ein Umfallen des Fahrzeuges durch verstärkte Lenkbewegung verhindert. Zum einen wird durch den Nachlauf der Reifenaufstandspunkt des Vorderrades aus der Symmetrieebene des Fahrzeuges (X-Z Ebene) herausbewegt, was zur Folge hat, dass der Systemschwerpunkt über der Reifenaufstandslinie gehalten werden kann, um Rollbewegungen zu vermeiden. Zusätzlich wirken durch die eingeleitete Kurvenfahrt Fliehkräfte am Motorrad, die ebenfalls der Rollbewegung des Motorrades ins Kurveninnere entgegenwirken. Für ideal schmale Reifen spürt der Fahrer in der Motorradebene keine Querkraft. Als Rollen wird hierbei eine Drehung um die X-Achse um den Winkel λ bezeichnet.
Steigert man nun die Geschwindigkeit in den selbst stabilisierenden Bereich hinein, dann werden die gyroskopischen Effekte stärker und bewirken eine metastabile aufrechte Lage des Motorrades. Einspurige Fahrzeuge fahren eigentlich nie aufrecht und geradeaus, da es zur Selbststabilisierung einer ständigen Störung der Gleichgewichtslage bedarf.
Aus den Gleichungen für die Kreiselmomente lässt sich ableiten, dass eine Rollbewegung in Fahrtrichtung nach links einen Lenkeinschlag in dieselbe Richtung verursacht. Das aus dieser Lenkbewegung entstehende Kreiselmoment wirkt seiner Ursache, der Rollbewegung, entgegen und richtet das Motorrad wieder auf.
Gleichungen der Kreiselmomente:
mit
- Θrot : Massenträgheitsmoment des Laufrades um die Radachse;
- ωx : Rollwinkelgeschwindigkeit;
- ωy : Raddrehgeschwindigkeit;
- ωz : Lenkgeschwindigkeit senkrecht zur Fahrebene
Daraus wird ersichtlich, dass ein bei Geradeausfahrt am Lenker aufgebrachtes Lenkmoment nach links ein Rollmoment nach rechts bewirkt, welches das Motorrad in Schräglage bringt. Beim Motorradfahren kann somit ein Lenkimpuls in die entgegengesetzte Richtung der gewünschten Kursänderung gegeben werden, um die Kurvenfahrt einzuleiten, was der gängigen Praxis entspricht.
Kurvenfahrt
Die Kurvenfahrt unterscheidet sich beim einspurigen Fahrzeug stark von derjenigen zweispuriger Fahrzeuge. Während ein Auto stets bestrebt ist, eine Wankbewegung zum Kurvenäußeren auszuführen, ist beim Motorrad eine gegenteilige Bewegung im stabilen Fahrzustand der Fall. Motorräder neigen sich beim Kurvenfahren also ins Kurveninnere, wobei Winkel zwischen Fahrbahnsenkrechter und Motorradsymmetrieebene (λ) von bis zu 60° erreicht werden können. Diese Spitzenwerte sind allerdings nur unter sehr guten Umständen und unter kontrollierten Bedingungen möglich, wie sie z. B. im Rennsport herrschen. Im Straßenverkehr werden solch hohe Schräglagen üblicherweise nicht erreicht. Typischerweise bewegt sich die Abweichung von der Fahrbahnnormalen im Bereich λ < 30°, bei sportlichen Fahrern können aber auch durchaus 50° erreicht werden (siehe auch: Scheinlot).
Wichtig hierbei ist, dass die Grenze des kammschen Kreises nicht erreicht wird. Eigentlich müsste man korrekterweise von einem kammschen Oval sprechen, da die Reifen in Querrichtung und Längsrichtung unterschiedlich starke Kräfte übertragen können.
Stationär
In der unbeschleunigten Kurvenfahrt bei konstantem Kurvenradius muss der Fahrer, nachdem er den Einlenkvorgang bereits abgeschlossen hat, ein Lenkmoment aufbringen, um das Motorrad in Schräglage und auf Kurs zu halten. Dieses ist unter anderem abhängig von folgenden Faktoren:
- Gewichtsmoment des Lenksystems um die Lenkachse (wirkt kurveneindrehend)
- dem Moment, welches der Rollwiderstand um die Lenkachse erzeugt (ebenfalls eindrehend)
- dem Moment, welches durch den Nachlauf und die Reifenlängskräfte entsteht (ausdrehend)
- dem Moment, welches durch den Nachlauf und die Reifenseitenkräfte entsteht (eindrehend)
- Fliehkraftmomente am Lenksystem und am Restmotorrad (ausdrehend, eindrehend)
Die aufzubringenden Lenkmomente sind hierbei relativ klein und liegen typischerweise, in der Größenordnung von max. 25 Nm, weichen aber je nach Geschwindigkeit und Bauart des Motorrades von diesem Wert ab. Für ideal schmale Reifen ist die Lenkachse des Motorrades in Kurvenfahrt momentenfrei.
Für die gefahrene Schräglage gegenüber dem Erdschwerefeld, also ohne Einbeziehung der Fahrbahnneigung, ergibt sich unter Vernachlässigung der Kreiseleffekte und der Reifenbreite:

wobei
- v: gefahrene Geschwindigkeit
- g: Erdbeschleunigung
- R: Radius zum Momentanpol der Kurvenbewegung
 : Querbeschleunigung im erdfesten Koordinatensystem.
: Querbeschleunigung im erdfesten Koordinatensystem.
Durch den Rollwinkel führt die Resultierende aus sämtlichen am Schwerpunkt angreifenden Kräfte durch den Reifenaufstandspunkt. Besonderen Einfluss haben hier die Gewichtskraft und die Fliehkraft.
Durch den Umstand, dass die Reifen nicht ideal schmal sind, wandert der Reifenaufstandspunkt durch die Schräglage aus der Fahrzeugsymmetrieebene heraus, was den reellen Rollwinkel vermindert. Die Symmetrieebene des Motorrades hat also stets einen größeren Rollwinkel, als der Winkel zwischen den resultierenden Kräften und dem Erdschwerefeld ist. Es existiert somit ein physikalisch wirksamer Rollwinkel, welcher geringer ist als der geometrische Rollwinkel. Bei breiteren Reifen wandert der Reifenaufstandspunkt stärker aus, als bei schmalen, was zur Folge hat, dass man für den gleichen Kurvenradius bei gleicher Geschwindigkeit mit breiten Reifen mehr Schräglage benötigt, als mit schmalen. Allerdings beträgt der Anteil dieses Zusatzrollwinkels nur etwa 10 % des Gesamtrollwinkels.
Der maximalen Schräglage sind näherungsweise durch die Coulombsche Reibung Grenzen gesetzt. Wenn der Haftbeiwert μ beispielsweise 1 beträgt, dann ist es nicht möglich, einen physikalisch größeren Rollwinkel als 45° zu fahren.
Das Reibgesetz von Coulomb lautet hier im Grenzfall:

mit
- FZ: Normalkraft (Gewichtskraft)
- FQ,max: maximal übertragbare Querkraft (Zentripetalkraft)
- μ: Haftbeiwert
Das Verhältnis der Kräfte gibt also Aufschluss über den Haftbeiwert, welcher auch in Prozent ausgedrückt werden kann. Wenn der Haftbeiwert kleiner eins ist, dann ist die maximal übertragbare Querkraft und somit auch der maximale Rollwinkel geringer. Bei sehr guten Straßenbelägen kann der Haftbeiwert bei 1,2 liegen, bei Schnee ist er unter 0,1.
Instationär
Bei der instationären Kurvenfahrt (bei Beschleunigung in der Kurve beziehungsweise Einleiten einer Kurvenfahrt) treten weitere Effekte auf, die zum Teil starke Einflüsse auf den Fahrzustand haben können.
Bewegt sich ein Motorrad in einer Kurve, fährt es auf einem Reifenlatsch, der außerhalb der Symmetrieebene liegt. Sowohl der Reifenaufstandspunkt des Vorderrades, als auch der des Hinterrades sind also nicht mittig. Wirken nun Kräfte an den Reifenaufstandspunkten in Fahrtrichtung, entstehen Momente um die Symmetrieebene. Ein Bremsen am Vorderrad bewirkt hierdurch ein einlenkendes Moment um die Lenkachse. Gelingt es dem Fahrer nicht, dieses Moment zu kompensieren, dreht der Lenker nach Kurveninnen, das Motorrad richtet sich auf, das Motorrad fährt einen größeren Kurvenradius. Dies kann dazu führen, dass Fahrzeug und Fahrer aus der Kurve herausgetragen werden und verunfallen. Da man mit dem Handbremshebel im Grunde beliebig schnell Bremsdruck aufbauen kann, ist die Zeit, in der ein sehr großes Bremslenkmoment aufgebaut werden kann, recht gering, was zu einer schnellen Änderung des Kurvenradius führt und Stress beim ungeübten Fahrer auslöst.
Aus der Verhaltensforschung (Prof. Spiegel, Die obere Hälfte des Motorrades) ist bekannt, dass Fahrer in Paniksituationen wie einer Notbremsung in der Kurve dazu neigen, das Fahrzeug aufzurichten, um vermeintlich besser bremsen zu können. Dies findet sich in der Unfallstatistik wieder. Beispielsweise findet Sporner in Unfalldatenbanken oft die Kombination der Unfallmerkmale "Verlassen der Fahrbahn nach rechts", "Alleinunfall" und "Fahrunfall".
Am Hinterrad kommt dieser Effekt weniger zum Tragen, da die Hinterradführung nur elastisch verformbar ist und keinen Freiheitsgrad abgesehen der Einfederung und Reifenrotation bietet. Aus der größeren Reifenbreite erfolgt jedoch die Tatsache, dass der Reifenaufstandspunkt weiter auswandert und immer noch merkliche Momente um die Hochachse des Fahrzeuges in dieses eingeleitet werden. Ein Beschleunigen des Fahrzeugs in Kurvenfahrt erzeugt somit ein Kurvenausdrehendes Gier-Moment, ein Bremsen des Hinterrades ein Kurveneindrehendes Gier-Moment. Dies ist häufig der Grund, weshalb man beim Anbremsen einer Kurve verstärkt die Hinterradbremse betätigt, um das Motorrad „in die Kurve hinein zu ziehen“. Des Weiteren ist eine Überbremsung des Hinterrades leichter zu kontrollieren als eine Überbremsung des Vorderrades, insbesondere in Schräglage.
Das Überbremsen des Vorderrades über einen Zeitraum von wenigen Zehntelsekunden in Schräglage ist vom Menschen nicht mehr auszuregeln.
Siehe auch: Stützgas
Stabilitätsprobleme
Wie bereits weiter oben erwähnt ist das Motorrad systembedingt instabil. Die Hauptstabilitätsstörung folgt aus dem Kippen des Fahrzeuges, was aber einfach zu beherrschen ist. Das Kippen des Einspurfahrzeuges an sich ist nicht schwingend und somit als unkritisch zu bezeichnen, wenn man die oben genannten Stabilisierungsmöglichkeiten in Betracht zieht. Es existieren jedoch Stabilitätsstörungen, die periodisch auftreten können oder andere Störungen hervorrufen und somit besonderer Betrachtung bedürfen.
Pendeln (Weave)
Als Pendeln wird eine komplizierte Schwingung des gesamten Motorradsystems im Frequenzbereich zwischen 3 und 4 Hertz bezeichnet. Hierbei vollführt das Motorrad eine gekoppelte Schwingung um Gier-, Roll- und Nickachse. Die Rollachse liegt am Anfang des Pendelns in der Verbindungslinie der Reifenaufstandspunkte, also in der Reifenaufstandslinie. Im weiteren Verlauf wandert diese Linie immer weiter in Richtung Systemschwerpunkt. Ausgelöst wird das Pendeln unter anderem von plötzlichen Lenkbewegungen, Fahrbahnunebenheiten, und anderen vorangegangenen instabilen Fahrzuständen. Es kann begünstigt werden durch unpassende Reifenwahl, Unwuchten an den Rädern, Lenkkopfspiel oder ein zu stramm eingestelltes Lenkkopflager und vieles mehr. Die Dämpfung der Pendelschwingung ist stark von konstruktiven Merkmalen des Fahrzeuges sowie dessen Beladungszustand und vor allem von der Geschwindigkeit abhängig. Unter Umständen kann es vorkommen, dass das Pendeln nicht mehr gedämpft, sondern verstärkt wird, was in der Regel zum Sturz führt. Mit steigender Geschwindigkeit steigt die Schwingneigung an, sodass das einzig sinnvolle Mittel, um ein pendelndes Motorrad zu stabilisieren, eine Herabsetzung der Geschwindigkeit ist.
Lenkerflattern (Wobble, Shimmy)
Das Lenkerflattern bezeichnet eine Eigenschwingung des Lenksystems um die Lenkachse und liegt typischerweise im Bereich um die 10 Hz. Es wird z. B. durch Reifenunwuchten ausgelöst, welche bei passender Geschwindigkeit, normalerweise im Bereich zwischen 55 km/h und 65 km/h, eine harmonische Anregung des Lenksystems bewirken. Die Eigenfrequenzen des Lenksystems lassen sich bei der Konstruktion sehr gut abschätzen und können durch Gewichte an den Lenkerenden beeinflusst werden.
Beginnt ein Motorrad zu flattern, kann man durch festeres oder weniger festes Greifen des Lenkers das Trägheitsmoment des Lenksystems beeinflussen und so die Eigenfrequenz verstimmen. Ebenso verringert ein Verändern der Fahrgeschwindigkeit aus dem kritischen Bereich heraus die Flatterschwingung. Im Allgemeinen ist das Flattern nicht besonders kritisch, es kann jedoch zum Pendeln oder Kickback führen und ist somit als ebenso gefährlich einzustufen.
Lenkerschlagen (Kickback)
Lenkerschlagen wird eine Schwingung des Lenksystems um die Lenkachse genannt, welche wenige, sehr große Amplituden mit sehr großen Lenkgeschwindigkeiten ausführt. Diese Lenkbewegungen können so gewaltig sein, dass der Fahrer den Lenker nicht mehr halten kann. Es tritt verstärkt an modernen leistungsfähigen Sportmotorrädern auf. Grundsätzlich kann Lenkerschlagen sowohl bei Geradeaus- als auch bei Kurvenfahrt auftreten, und zwar in jedem Geschwindigkeitsbereich. Durch heftiges Lenkerschlagen kann es vorkommen, dass die Lenkwinkelfreiheit erschöpft ist und der Lenker an seine Anschläge gerät, die dadurch beschädigt werden können, was weitere Schäden zur Folge haben kann.
Lenkerschlagen wird durch starke Radlastschwankungen am Vorderrad hervorgerufen, wie z. B. beim Abheben des Vorderrades durch einen Wheelie oder eine unebene Fahrbahn. Zusätzlich muss eine Seitenkraft am Vorderrad angreifen, wie z. B. die Haltekraft in Kurvenfahrt, durch eine geneigte Fahrbahn oder Seitenwind. Ebenso kann eine Seitenkraft beim nicht mittigen Überfahren einer Unebenheit durch die Unebenheit selbst in das Motorrad gebracht werden, oder der Lenkwinkel wird während der Flugphase des Vorderrades verstellt. Eine solche Seitenkraft erzeugt durch den konstruktiven Nachlauf des Vorderrades und weitere Faktoren einen Lenkimpuls, der einen Schräglauf des Rades verursacht. Setzt dann das Rad wieder auf, entstehen kurzzeitig durch die Massenträgheiten große Radaufstandskräfte und mit ihnen große Querkräfte, die ein sehr großes Lenkmoment erzeugen.
Lenkerschlagen lässt sich wirksam nur durch einen Lenkungsdämpfer unterbinden.
Fahrfehler
Dynamische Vorderradüberbremsung
Bei Bremsungen verlagert sich die Radlast des Fahrzeugs zum Vorderrad hin. Im Extremfall kann das Hinterrad bei starken Bremsverzögerungen von etwa 10 m/s² abheben. Die Radlastverlagerung benötigt durch das sogenannte Aufbaunicken (umgangssprachlich: Einfederung des Vorderrades) einige Zehntelsekunden. Erst bei stationärem Nickzustand kann das Vorderrad die volle (und vom Fahrer erwartete) Bremskraft übertragen. Ein häufiger Fahrfehler, der oftmals zu schweren Unfällen führt, ist das deutlich zu schnelle Steigern der Bremskraft am Vorderrad. Ist die gewünschte Bremskraft höher als die maximal übertragbare Bremskraft, läuft das Rad "in die Blockade", es hört auf zu drehen. Die Seitenführungskraft verschwindet, die Bremskraft "knickt" das Fahrzeug gegen das Hinterrad ein. Ein Sturz innerhalb von etwa 0,1–0,3 Sekunden ist nicht mehr vermeidbar. Weitere Informationen finden sich in "J. Funke: Belastung und Beanspruchung von Motorradfahrern bei der Bremsung mit verschiedenen Bremssystemen, Fortschr.-Ber. VDI Reihe 12 Band 633, Diss. TU Darmstadt, 2006", S. 20ff. - online: [1] -
Highsider
Ein Highsider ist ein Sturz beim Motorradfahren, bei dem sich das Motorrad zur kurvenäußeren Seite überschlägt. Er entsteht, wenn ein Motorrad in Schräglage nach einer Rutschphase wieder Grip bekommt und sich dadurch ruckartig aufrichtet. In einigen Fällen wirkt das Motorrad dabei, ähnlich dem Stab im Stabhochsprung, als Hebel auf den Fahrer und katapultiert diesen aus dem Sitz. Der Name Highsider leitet sich von der Tatsache ab, dass das Motorrad auf seine "high side", also die Oberseite fällt.
Das Wort Highsider wird gelegentlich auch verwendet, um einen gerade noch vermiedenen Sturz nach diesem Muster zu bezeichnen.
Das Gegenstück zum Highsider ist der sogenannte Lowsider, wobei ein Rad einfach wegrutscht und das Motorrad zur kurveninneren Seite, zur "low side" fällt. Der Highsider ist jedoch wesentlich gefährlicher: Beim Lowsider rutschen das Motorrad und der Fahrer tangential weg, der Fahrer bleibt wegen seiner höheren Bodenhaftung hinter dem Motorrad zurück und hat noch eine Kontrolle der Bewegung durch den Bodenkontakt. Beim Highsider hingegen wird der Fahrer unkontrolliert abgeworfen, das Motorrad folgt dabei dem Fahrer in derselben Richtung und kann somit buchstäblich auf den Fahrer fallen. Dies kann schwere bis tödliche Verletzungen zur Folge haben.
Der Highsider beginnt, wenn das Hinterrad z. B. beim Herausbeschleunigen aus einer Kurve die maximale Haftgrenze überschreitet. Dies hat zur Folge, dass die Seitenführungskraft des Rades geringer und der Schräglaufwinkel größer wird. Ebenso beginnt das Motorrad zu kippen, weil ein Teil der Seitenführung, die zum Kräftegleichgewicht mit dem Fahrzeuggewicht nötig ist, wegfällt. Falls das Rad nun plötzlich wieder mehr Haftung bekommt, was durch Unterschiede im Fahrbahnbelag, Ziehen der Kupplung oder Ähnliches geschehen kann, verringert sich der Schräglauf wieder mit hohem Gradienten, und das Motorrad wird durch seine Trägheit beim Aufrichten in die Federn gedrückt. Hat das Motorrad seine aufrechte Lage wieder erreicht, entspannen sich die Federn im Fahrwerk wieder und schleudern den Fahrer aus dem Sitz. Hinzu kommt noch die Geschwindigkeit, die der Fahrer durch die Rollbewegung beim Aufrichten des Motorrades bekommt. Ein Highsider kann zur Folge haben, dass der Fahrer mehrere Meter durch die Luft fliegt. Der Highsider tritt im Motorrad-Rennsport vor allem gegen Rennende auf, wenn der Reifen-Grip stark abbaut.
Kritik
Der Betrieb von Motorrädern wird in Teilen der Öffentlichkeit kritisch gesehen. Wesentliche Kritikpunkte sind:
- Motorradfahrer haben ein im Vergleich zu Pkw-Nutzern erhöhtes statistisches Unfallrisiko: So stehen im Jahre 2006 793 getöteten Motorradfahrern nur ca. 2800 getöte Pkw-Insassen gegenüber, obwohl in etwa zwölfmal so viele Pkw wie Krafträder zugelassen sind.[3]
- Die Lärmemissionen liegen bei einigen Motorrädern und unter bestimmten Betriebsbedingungen über dem allgemeinen Niveau des Pkw-Verkehrs.
- Der spezifische Verbrauch vor allem leistungsstarker Motorräder liegt zum Teil weit über dem von Pkw.
In Deutschland sind einige Straßen und Gebiete aus unterschiedlichen Gründen (zeitweise) selektiv für den Motorradverkehr gesperrt[4][5]. Für eine Auflistung siehe hier.
Literatur
- Bernt Spiegel: Die obere Hälfte des Motorrads. Motorbuch Verlag, München 2002, ISBN 3-613-02268-0. (Wichtig für den mentalen Hintergrund - hier erklärt ein Verhaltensforscher, Motorradfahrer und Instruktor die Grundlagen, Hilfen und Techniken des Fahrens)
- Harry Niemann: Der Kniff mit dem Knie. Motorbuch Verlag, ISBN 3-613-01737-7.
- Keith Code: Der richtige Dreh II. 1. Aufl. California Superbike Verlag, Schuld 1995 (Band 2), ISBN 3-924662-01-0. (Standardwerk zu den Grundlagen des Motorradfahrens); Amerikanische Originalausgabe: A Twist of the Wrist II. Acrobat Books, Venice 1993, ISBN 0-918226-31-7.
- Jürgen Stoffregen: Motorradtechnik. Vieweg Verlag, Braunschweig 2004, ISBN 3-528-44940-3. (Technisches Fachbuch auf dem neuesten Stand)
- Nepomuck/Janneck: Das Schrauberhandbuch. Moby Dick Verlag, ISBN 3-89595-101-3. (laienverständliche Darstellung von Technik, Wartung und Instandsetzung)
- Hugo Wilson: Das Lexikon vom Motorrad. Motorbuch Verlag, Stuttgart 2001, ISBN 3-613-01719-9. (Gute Übersicht)
- Thomas Krens and Matthew Drutt (Hrsg.): The Art of the Motorcycle. 2003, ISBN 0-8109-9106-3 (Kompendium der Motorradgeschichte, -kultur, -technik und des Designs)
- Erwin Tragatsch: Motorräder - Deutschland, Österreich, Tschechoslowakei 1894 - 1976. Motorbuch Verlag, Stuttgart 1985, ISBN 3-87943-213-9 (Das Buch stellt nahezu 500 Firmen vor, die in den genannten Ländern Motorräder gebaut haben.)
- Alan Dowds: Motorräder. Verlag EDITION XXL, 2005. (100 der weltbesten Superbikes), ISBN 3-89736-329-1
- Bernt Spiegel: Motorradtraining alle Tage. Motorbuch Verlag, München 2006, ISBN 3-613-02501-9. (Praxisband zu Die obere Hälfte des Motorrads. Weniger Theorie, trotzdem gut verständlich auch ohne das Hauptwerk.)
- Alexander Spoerl: Mit Motorrad und Roller auf du, Piper Verlag München, 1955, reprint Schrader Verlag 1995, ISBN 3-613-87139-4. Der berühmte Autor erklärt die Feinheiten und Eigenschaften des Motorradlebens im typischen Stil der 50er Jahre
- Motorräder, Motorroller, Mopeds und ihre Instandhaltung: Ein Lehr- und Nachschlagebuch für Motorradmechaniker und Kraftfahrzeughandwerker, für Techniker und Fachschulen, für Kraftradfahrer, Motorsportler und Fahrschulen. Unter Mitarbeit hervorragender Fachkenner herausgegeben von Hans Trzebiatowsky. Fachbuchverlag Pfanneberg, Gießen 1955. - XVI, 978 S. Mit 1618 Abbildungen. - Reprint: Bulldog Press, Limburg/Lahn 1994.
- Willi Thoelz: Das Kraftrad: Konstruktion, Bau und Betrieb, Pflege und Instandsetzung, Fahrtechnik und Wettbewerbe. Berlin: R. C. Schmidt & Co., 2 Auflagen von 1939 und 1943. 3. Auflage unter dem Titel Das Motorrad ...
- Willi Thoelz: Motorrad und Motorroller: Konstruktion, Bau und Betrieb, Pflege und Reparatur, Fahrtechnik und Wettbewerbe Vollständig neu bearbeitet von Joachim Fischer und Helmut Hütten. Braunschweig; Berlin: R. C. Schmidt, 4. Auflage 1957.
- Helmut Werner Bönsch: Einführung in die Motorradtechnik. Stuttgart: Motorbuch-Verlag, [1978?], ISBN 3-87943-571-5
- Helmut Werner Bönsch: Fortschrittliche Motorrad-Technik: eine Analyse der Motorrad-Entwicklung. Stuttgart: Motorbuch-Verlag, 1985, ISBN 3-613-01054-2
Siehe auch
- ABS
- Allrounder (Motorrad)
- Chopper (Motorrad)
- Cruiser (Motorrad)
- Custombike
- Fahrtechnik
- Krad-Schützen
- Motorradhersteller
- Motorradsport
- Naked Bike
- Schutzausrüstung (Motorradsport)
- Superbike
- Supersportler
- Sporttourer
- Tourer
- Themenliste Straßenverkehr
- Zweirad mit Frontantrieb
Quellen
- ↑ Statistische Bundesamt Deutschland
- ↑ MOTORVISION: „Was können Integral-ABS und ASC?“
- ↑ Statistisches Bundesamt Deutschland
- ↑ MOTORRAD online
- ↑ ZEIT Online
- Für die Fahrdynamik wurde herangezogen: Dr.-Ing Alois Weidele: „Skriptum zur Vorlesung: Motorräder“. TU-Darmstadt, Fachgebiet Fahrzeugtechnik, 2005
Weblinks









Wikimedia Foundation.