- Überlagerungsgetriebe
-
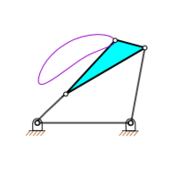
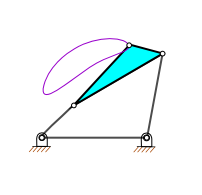
 Getriebe mit vier Gliedern: Antriebsritzel u. re., Zwischenrad li. und Abtriebsrad o. re., sowie Gestell / Rahmen
Getriebe mit vier Gliedern: Antriebsritzel u. re., Zwischenrad li. und Abtriebsrad o. re., sowie Gestell / RahmenGetriebe sind bewegliche Verbindungen von Teilen zum Übertragen und Umwandeln von Drehbewegungen. Für verschiedene Bauarten wird meist der Begriff Mechanismus oder Räderwerk benutzt.
Bekannte Vertreter sind das Fahrzeuggetriebe und das Uhrwerk.
Begriffsdefinitionen
Getriebe sind mechanische Bauteile (Maschinenelemente) zum Übertragen und Wandeln von:
- Drehzahlen
- Drehrichtungen
- Drehmomenten
- Kraftfluss
In Anlehnung an VDI-Richtlinie 2127:
- Getriebe dienen zur Übertragung und Umformung (Übersetzung) von Bewegungen, Energie und/oder Kräften.
Sie sind meist mechanische Vorrichtungen (einfache Maschine), können aber auch auf hydraulischen, pneumatischen, elektromagnetischen Prinzipien beruhen. Sie bestehen aus mindestens drei Gliedern, von denen eines das Gestell bildet.
- Generelle primäre Funktion eines jeden Getriebes ist die Anpassung einer gegebenen Eingangsdrehzahl, z. B. die Drehzahl von Elektromotoren, an eine geforderte Ausgangsdrehzahl, z. B. für ein Werkzeug. Beispiele: Motor des Rasierers an Drehzahl der Rundmesser oder Automotordrehzahl (6000 U./min) am Getriebeeingang soll am Getriebeausgang 1000 U./min haben. Im 4. oder 5. Gang gilt üblich jedoch 1:1, d. h. "direkter" Gang.
- Übersetzungsgetriebe. Beispiel bei Riemenscheiben: Die Drehzahl des Eingangsrades ist am Ausgang um den Faktor n2/n1 größer. Die gewünschte (größere) Ausgangsdrehzahl erreicht man durch das Verhältnis der Durchmesser von Eingang (D1) zu Ausgang (D2); bei D1 = 42 cm mit n = 100 U./min und D2 = 14 cm ergibt sich die Ausgangsdrehzahl n2: D1/D2 = n2/n1. n2 = 42/14 x 100 = 300 U./min. Dies ist ohne Formel, durch Überlegung einfacher zu lösen. Hat das große Rad dreifachen Durchmesser i. Vgl. zum kleinen, hat es auch 3 Mal soviel Umfang. Dreht sich dieser Umfang 1 Mal, muss sich das kleine Rad 3 Mal drehen, also hat es auch dreifache Drehzahl. Dieses Verhältnis kann sich belastet oder unbelastet nicht ändern;
- Die Übersetzung ist bei Getrieben das Verhältnis zwischen Antriebs- und Abtriebsdrehzahl. Das Verhältnis ändert sich in belastetem Zustand natürlich nicht.
- Untersetzungsgetriebe. Ausgangsdrehzahl wird niedriger. Die Zähnezahl Z1 sei 13 mit n1 = 500 U./min und Z2 sei 28. Es gilt: Z1/Z2 = n2/n1; dann ist n2 = Z1/Z2 x n1 = 13/28 x 500= 232,1 U./min.
- Die Abtriebswelle soll eine geforderte Drehzahl n2 erreichen. Je nach Verhältnis der Zähnezahlen von Eingangs-(Z1) und Ausgangszahnrad (Z2) wird die Anpassung der Drehzahl n1 (Motor) am Getriebeausgang n2 erreicht. Es gilt: n1/n2 = Z2/Z1. Beispiel: Motorwelle n = 2000 U./min; d. h. Eingang Getriebe n1 = 2000 U./min mit Z1 = 12 Zähne; das Ausgangszahnrad (Z2) habe 24 Zähne. Es wird sich somit mit n2 = Z1/Z2 x n1 drehen = 12/24 b 2000 = 1000 U./min.
- Multipliziert man die Nennleistung mit den Betriebsfaktoren, so erhält man die Bemessungsleistung.
- Der Wirkungsgrad η eines Getriebes ergibt sich aus dem Verhältnis der Abtriebs- zur Antriebsleistung (ca. 93-95 Prozent).
- Der Stellbereich R oder SV ist das Verhältnis der maximalen zur minimalen Übersetzung.
Getriebe mit gleichmäßiger Übersetzung (für Drehbewegung)
Der Einsatz dieser Form von Getrieben erfolgt hauptsächlich
- zur Wandlung der Drehzahl
- zur Wandlung des Drehmoments
- zur Wandlung des Masseträgheitsmoments
Das Getriebe wird meist zwischen dem Antriebsaggregat (Motor) und dem zu treibenden Maschinenteil mittels Kupplungen eingebunden. Getriebe werden nach verschiedenen Kriterien unterteilt:
Nach Bauart
- Feste Getriebe - Drehzahlverhältnis und Drehmomentwandlung sind nicht veränderbar
- Verstellgetriebe können in gestufte und stufenlose Getriebe unterteilt werden.
- Schaltgetriebe: Drehzahl und Drehmoment können abgestuft geschaltet werden. Die Funktion kann auch in einer Drehrichtungsumkehr in Form eines Rückwärtsganges liegen. (Typ. Verwendung in Kraftfahrzeugen.)
- Zugmittelgetriebe, siehe Continuously variable transmission (CVT)
- Kettengetriebe
- Schubkettengetriebe mit Schubgliederband
- Zugmittelgetriebe, siehe Continuously variable transmission (CVT)
- Reibgetriebe
- Wälzkörpergetriebe
- Zugmittelgetriebe, siehe Continuously variable transmission (CVT)
- Riemengetriebe (Flachriemen, Keilriemen)
- Automatisches Getriebe: siehe Fahrzeuggetriebe
- Schaltgetriebe: Drehzahl und Drehmoment können abgestuft geschaltet werden. Die Funktion kann auch in einer Drehrichtungsumkehr in Form eines Rückwärtsganges liegen. (Typ. Verwendung in Kraftfahrzeugen.)
- Leistungsteilungsgetriebe: beispielsweise Differentialgetriebe
Nach der Art der Kraftübertragung
Mechanische Getriebe
Formschlüssige Getriebe
- Getriebe mit Zahnrädern
- Stirnradgetriebe: Eingangs- und Ausgangswelle sind parallel.
- Planetengetriebe: An- und Abtriebswelle sind koaxial. Um das Innenrad kreisen Planetenräder, die ihrerseits wieder in ein Außenrad eingreifen. Sonderform der Stirnradgetriebe (zum Beispiel in der Nabenschaltung von Fahrrädern).
- Kegelradgetriebe: An- und Abtriebswelle sind nicht parallel (meist 90°) angeordnet. Die äußere Form der Zahnräder (Hüllkurve) entspricht Kegeln, deren Mittelachsen sich schneiden.
- Kronenradgetriebe: Verwendung und Bauform wie Kegelradgetriebe; allerdings ist das Ritzel als Stirnrad ausgeführt, und das Gegenrad hat die Form einer Krone mit der Verzahnung an der Radseite. Daher nennt man es Kronenrad.
- Schraubenradgetriebe: Wellen kreuzen sich. Die Wellenachsen sind windschief, haben also keinen Schnittpunkt.
- Ausgleichsgetriebe (auch Differentialgetriebe): Spezialgetriebe, das vor allem im Kraftfahrzeugbau eingesetzt wird.
- Schieberadgetriebe: Bei Schieberadgetrieben werden die verschiedenen Übersetzungsstufen durch axiales Verschieben eines Räderblocks auf einer Getriebewelle hergestellt.
- Harmonic-Drive-Getriebe (auch Taumelradgetriebe): es fällt unter die sogenannten Umlaufgetriebe. Beim Harmonic-Drive-Getriebe wird das Antriebselement durch einen elliptischen Kurvenkörper permanent verformt. Das Untersetzungsverhältnis von HD-Getrieben ist systembedingt hoch. Es wird unter anderem bei Robotern, Geräten und Maschinen, auch in Luft- und Raumfahrt eingesetzt, wenn dort eine Drehzahl stark reduziert oder ein Moment stark erhöht werden muss. Aus Aufbau und Wirkart ergibt sich eine nahezu spielfreie Verzahnung.
- Zykloidgetriebe
- Schneckengetriebe
- Kettengetriebe (siehe auch Antriebskette und Kettenarten)
- Zahnriementrieb
- Schrittgetriebe
Kraftschlüssige Getriebe
Hauptartikel: Reibgetriebe
- Riemengetriebe (hierzu werden auch kraftschlüssige Kettengetriebe gezählt)
- Kegelringgetriebe: An- und Abtriebswelle sind in Form von Kegeln dargestellt, die über einen stufenlos verstellbaren Ring eine (nahezu) beliebige Übersetzung ermöglichen.
- Wälzkörpergetriebe (auch: Reibradgetriebe)
- Rollringgetriebe
Hydraulische Getriebe
Bei hydraulischen Getrieben (siehe Strömungsgetriebe) sind An- und Abtriebsseite nicht mechanisch miteinander verbunden (kraftschlüssiges Getriebe). Die Antriebsseite setzt eine Flüssigkeit im Inneren in Bewegung, die die Abtriebsseite antreibt. Es wird zwischen hydrostatischen und hydrodynamischen Getrieben unterschieden.
Pneumatische Getriebe
Pneumatische Getriebe sind nicht bekannt, jedoch werden Pneumatik-Motoren (linear oder drehend) häufig als Antrieb für Getriebe und Mechanismen verwendet.
Bekannt sind Elektro-Pneumatische Getriebe. Eine Steuerelektronik steuert über elektrisch schaltbare Ventile die Druckluft für Pneumatikzylinder an. Somit wird das Getriebe elektropneumatisch geschaltet.
Man könnte die Turbinenantriebe von Zahnarztbohrern als pneumatische Getriebe bezeichnen. Ein niedrig drehender Kompressor komprimiert Luft, die dann im Handstück des Zahnarztes eine hochdrehende winzige Turbinenwelle in Bewegung setzt.
Elektrische und elektronische Getriebe
Das einfachste „elektrische Getriebe“ ist ein Generator (Antrieb), der mit einer bestimmten Drehzahl angetrieben wird, und einen daran angeschlossenem Elektromotor (Abtrieb), der, von diesem gespeist, mit einer anderen Drehzahl dreht.
Über die Feldsteuerung des Generators kann die elektrische Spannung und somit die Drehzahl des Motors (Abtriebes) variiert werden. Eine solche Anordnung nennt man Leonardsatz, wenn zum Antrieb des Generators ein Elektromotor verwendet wird. Dient zum Antrieb ein Dieselmotor, liegt ein sogenannter dieselelektrischer Antrieb vor. Solche Antriebe werden in Dieselloks und Schiffen verwendet; der Dieselmotor kann nun immer mit optimaler Drehzahl arbeiten, der Abtrieb kann ab Drehzahl null das volle Drehmoment liefern. Der Abtrieb kann auf mehrere Räder oder Propeller verteilt werden und diese ggf. mit unterschiedlichen Drehzahlen und Momenten antreiben.
Beispielsweise in Schiffen werden auch Gasturbinen als Antriebsmaschinen eingesetzt.
Diesel- und Ottomotoren werden in Hybridfahrzeugen verwendet.
Fast jeder elektrische Hybridantrieb verfügt über Funktionen eines elektrischen Getriebes, teilweise mit anschließender Leistungsverzweigung über mechanische Systeme (Differentialgetriebe) oder zunehmend elektrisch (Einzelradantrieb). Im Hybrid Synergy Drive wird eine Leistungsverzweigung zur Reduzierung der Leistungsübertragung über das elektrische Getriebe integriert um Verluste und Dimensionierung zu minimieren.Ein derartiges elektrisches Getriebe war Anfang der 1990er Jahre auch der serielle Hybridantrieb der FICHTEL & SACHS AG: ein Verbrennungsmotor treibt einen Generator für elektrischen Strom, der erzeugte elektrische Strom wird anschließend über einen Umrichter an zwei Elektromotoren (Tandem-Motoren) an den Rädern geliefert.
Ein Magnetisch-Elektrischer Getriebe-Automat (MEGA) integriert in einem Gehäuse die elektronische Leistungssteuerung, Antriebsrotor, Abtriebsrotor und einen verschiebbaren gemeinsamen Stator. Durch Veränderung der wirksamen Windungszahlen während des Betriebs wird die Auslegung auf hohes Drehmoment oder hohe Drehzahl variiert. So wird ein Wirkungsgrad von 80 bis 90 Prozent über alle Übersetzungen von annähernd Null bis annähernd unendlich erreicht. Die Entwicklung zur Serienreife des MEGA erfordert noch Entwicklungen der Automobil-Zulieferer. Das Antriebskonzept mit dem von Volkswagen entwickelten Getriebe wird als Direkthybrid bezeichnet.[1][2]
Es gibt auch Kopplungen von Synchrongenerator und Synchronmotor, bei denen keine Steuerung erforderlich ist. Diese erreichen insbesondere bei hohen Untersetzungen bessere Wirkungsgrade als mehrstufige mechanische Getriebe.
Der Begriff elektronisches Getriebe wird im übertragenen Sinne für eine elektronische Schaltung verwendet, die sowohl zur Drehzahl- als auch zur Drehmomentsteuerung dienen kann. Dabei werden nur die Motoren (Abtrieb) gesteuert. Verwendet wird dazu beispielsweise ein Frequenzumrichter oder ein Brückenverstärker. Der Antrieb des „Getriebes“ ist ein Drehgeber, der aus der Drehbewegung elektrische Steuersignale erzeugt.
Sind auch die Motoren mit Drehgebern (Winkelaufnehmer, Inkrementalgeber) ausgestattet, sind exakte Übersetzungsverhältnisse erreichbar. Solche Getriebe werden z. B. zur Drehung von Antennen (Antennenrotor zur Peilung oder bei Funkamateuren, Radar-Antennen) oder als „elektronische Welle“ in Manipulatoren und Flugzeugen (fly-by-wire) eingesetzt.Nach Bauform
Offene Bauform
Offene Bauform bedeutet, dass die Elemente des Getriebes frei zugänglich sind. Häufig werden sie jedoch aus sicherheitstechnischen Gründen verkleidet. Beispiele: Riemengetriebe (früher auch Transmission genannt)
Geschlossene Gehäuse
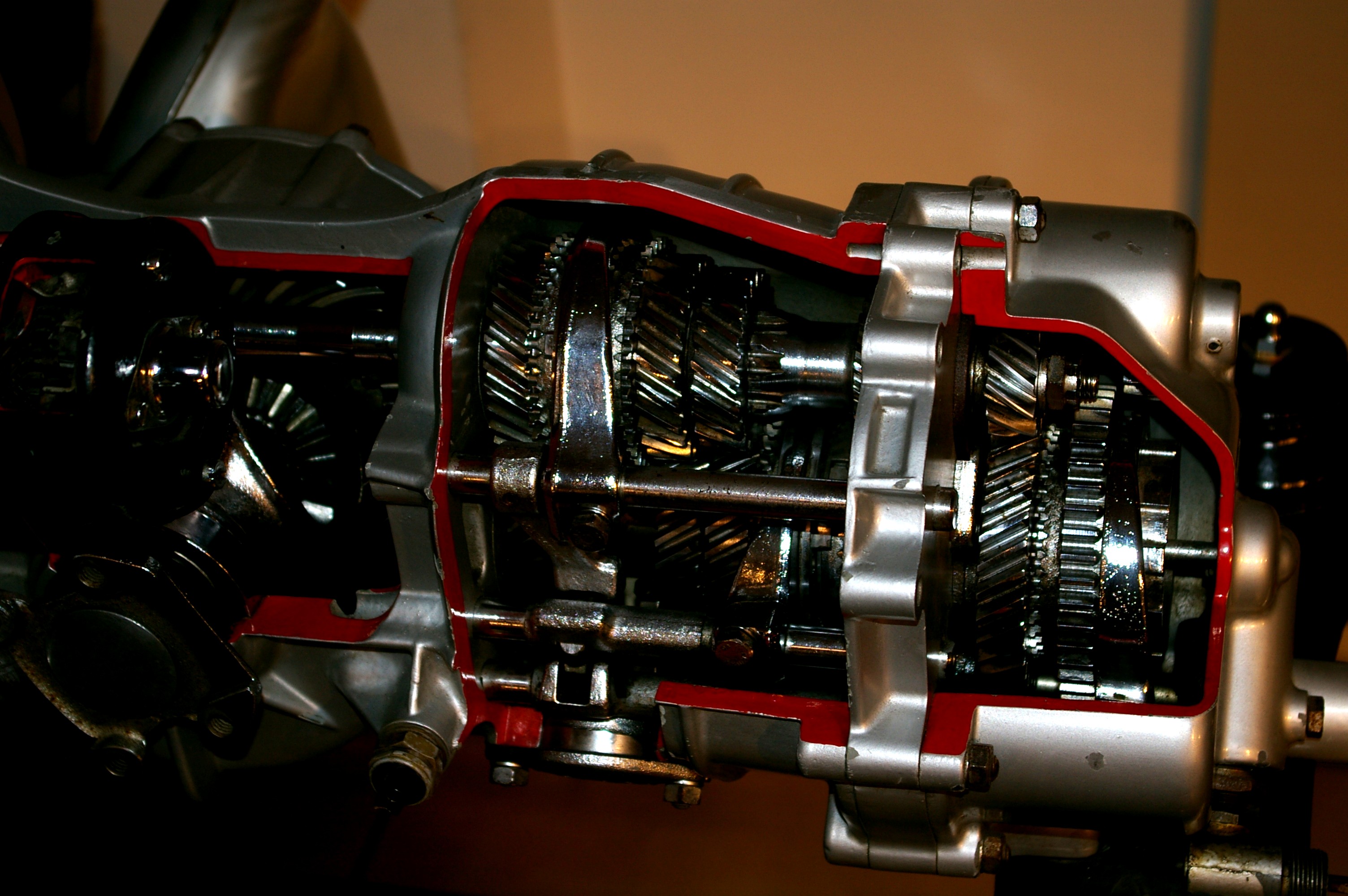
 Schnittmodell eines Autogetriebes
Schnittmodell eines AutogetriebesBei geschlossenen Getrieben kommt kein Sand bzw. Staub in das Getriebe, was wichtig für einen geringen Verschleiß ist. Die Schmierung erfolgt über Fett oder einen geschlossenen Ölkreislauf. Bei einfachen Getrieben reicht es zur Schmierung oftmals aus, wenn ein Zahnrad teilweise in ein Ölbad eintaucht und das beim Betrieb aufspritzende Öl die anderen Zahnräder mitschmiert. Das Gehäuse dient auch dem Lärmschutz und der Sicherheit. Beispiele: Kraftfahrzeuggetriebe, Differentialgetriebe
Getriebe mit einer ungleichmäßigen Übersetzung
Zur Berücksichtigung der Positionsabhängigkeit der Übersetzung von der jeweiligen Position des Antriebes benutzt man die Übertragungsfunktion. Diese zeichnet die Position des Abtriebes über der Position des Antriebes auf.
Kurvengetriebe
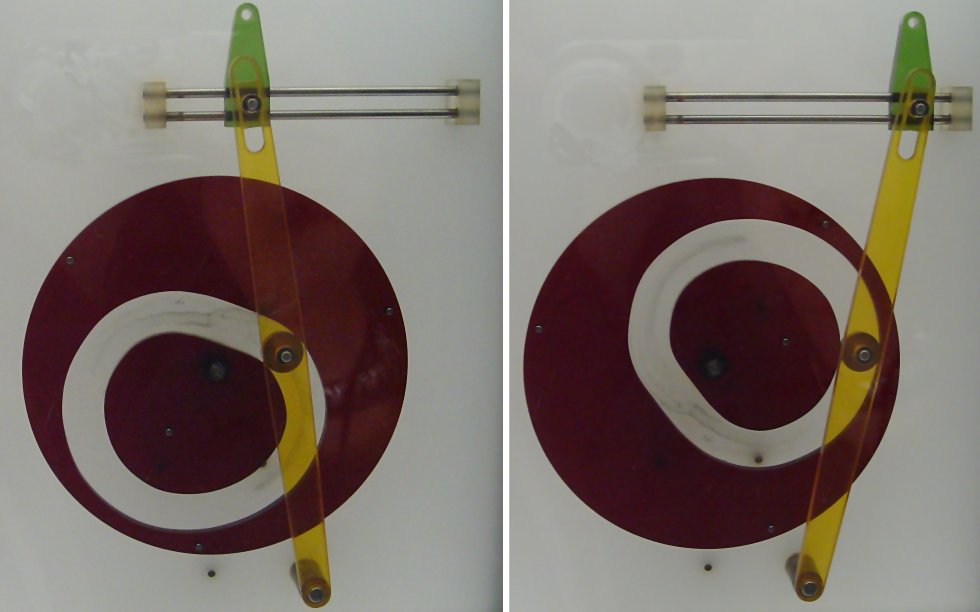
 Kurvengetriebe mit Nutführung
Kurvengetriebe mit Nutführung Kurvengetriebe mit Zylinderkurve
Kurvengetriebe mit ZylinderkurveAls Kurvengetriebe werden Mechanismen bezeichnet, bei denen die Form einer bewegten Kurve von einem Abtaster abgegriffen und an andere Getriebeelemente (rotatorische oder translatorische) weitergeleitet wird. Die Abtastung erfolgt meist einseitig, das heißt, der Abtaster läuft auf der Kurve, an die er gedrückt wird, aber bei zu großen abhebenden Kräften kann er auch von der Kurve abheben. Um das zu vermeiden, wurden verschiedene Lösungen zur Zwangsführung der Abtaster entwickelt.
Kurvenkörper können ihre Kurve durch Rotation oder Längsverschiebung auf den Abtaster übertragen. Oft werden Kurvenkörper eingesetzt, die nur als Kreissegment ausgebildet sind und zum Zweck der Abtastung darum hin und her schwingen, entsprechend der Hin- und Herbewegung ebener Kurvenkörper.
Kurvengetriebe werden sehr häufig in der Automation eingesetzt, um Schalter zu bedienen, oder um komplizierte Bewegungsabläufe auszuführen. Am geläufigsten ist der Einsatz in Verbrennungsmotoren, wo Kurvengetriebe (Nockenwelle) das Öffnen und Schließen der Ventile steuern. Von dort ist auch das Problem des Abhebens des Abtasters bekannt (Ventilflattern).
Die Synthese von Kurvengetrieben geht meistens einher mit der Synthese von Koppelgetrieben, die üblicherweise die abgetasteten Bewegungen weiterleiten und umformen. Es gibt spezielle Kurvenformen zur Optimierung des Abtastverhaltens:
- Geschwindigkeitsoptimal
- Beschleunigungsoptimal
- Kraftoptimal
- Geräuschminimierend
u. a. Dazu werden im Allgemeinen entsprechend geneigte Sinoiden verwendet.
Koppelgetriebe
 Koppelgetriebe
Koppelgetriebe- Hauptartikel: Koppelgetriebe
Kurbeltrieb
In die Gruppe der Koppelgetriebe gehört u. a. auch der Kurbeltrieb. Es setzt eine rotatorische (drehende) Bewegung in eine translatorische (geradlinige) Bewegung um oder umgekehrt. Anwendung findet er beispielsweise an Dampfmaschinen oder im Kolbenmotor. (siehe auch Kurbelwelle)
Schrittgetriebe
Schrittgetriebe setzen eine kontinuierliche Drehbewegung in eine intermittierende, schrittweise Drehbewegung um. Zwischen den einzelnen Schritten erfolgt eine Pause, bis der nächste Schritt beginnt. Schrittgetriebe können mit fast jeder Getriebeart realisiert werden.
Schrittgetriebe werden verwendet, um kontinuierliche Bewegungen in schrittweise Bewegungen mit momentaner oder zeitlicher Rast sowie auch mit Pilgerschritt (kurze Rückwärtsbewegung) umzuformen. Schrittgetriebe können u. a. durch Rädergetriebe, Räderkoppelgetriebe oder Koppelgetriebe, aber auch durch Kurvengetriebe und Getriebesonderbauformen realisiert werden.
Die bekannteste Bauform von Schrittantrieben ist das Malteserkreuzgetriebe, bei dem das bestimmende Getriebeteil (je nach Ausprägung) die Form eines Malteserkreuzes annehmen kann. Sie wurden beispielsweise in Filmprojektoren und -kameras eingesetzt, um die schrittweise Bewegung des Filmmaterials auszuführen, sind darüber hinaus aber wenig verbreitet.
Ordnung nach Hauptbestandteilen
- Zahnradgetriebe
- Schraubengetriebe
- Reibradgetriebe
- Zugmittelgetriebe (Riemengetriebe und Kettengetriebe)
- Druckmittelgetriebe (Hydraulikgetriebe und Pneumatikgetriebe)
- Koppelgetriebe
- Keilschubgetriebe
- Kurvengetriebe
Redewendung „Sand im Getriebe“
 „Besser ohne Sand“
„Besser ohne Sand“Aufgrund der Funktion eines Getriebes gibt es den umgangssprachlichen Ausdruck Sand im Getriebe, wenn etwas schleppend oder nur gestört funktioniert. Sand im Getriebe sorgt für erhöhten Verschleiß, kann ein Getriebe auch blockieren oder zerstören. Ihren Ursprung mag die Redewendung im Rennsport sowie bei anderen Wettbewerben haben, wie sie beispielsweise bei Ausschreibungen erfolgen. Dabei soll es mitunter vorkommen, dass tatsächlich Sand nebst anderen Sabotagemaßnahmen in Getriebe und Motoren eingebracht wird, um damit den Konkurrenten Nachteile zu verschaffen. Auch waren und sind nicht alle Getriebe dicht gekapselt, wodurch Sand und Schmutz ins Getriebe gelangen kann, wie beim Fahrrad, landwirtschaftlichen Maschinen oder einem Betonmischer.
Einzelnachweise
- ↑ http://miredaktion.sv-www.de/imperia/md/content/ap/charts/steiger.pdf
- ↑ http://miredaktion.sv-www.de/imperia/md/content/ap/charts/apr_t_007636_beitrag.pdf
Siehe auch
- Getriebemotor
- Direktschaltgetriebe (DSG)
- Themenliste Fahrzeugtechnik
- Kreisschubgetriebe
- Flaschenzug
- Hebel
- Linearantriebe
- Planetengetriebe
- Turbogetriebe
Weblinks
- Dissertation als Beispiel für die enge Verwandtschaft von Kurven- und Koppelgetrieben
- Digitale Mechanismen- und Getriebebibliothek (DMG-Lib)
- Kinematic Models for Design Digital Library (KMODDL)

Wikimedia Foundation.