- Beschleunigungswiderstand
-
Der Beschleunigungswiderstand ist einer der Widerstandskräfte, die auf ein Fahrzeug einwirken und dessen Leistungs- und Energiebedarf beim Betrieb bestimmen. Neben diesem sind es zusätzlich der Rollwiderstand, der Ludtwiderstandund gegebenenfalls der Steigungswiderstand. Der Beschleunigungswiderstand wird verursacht durch das physikalische Prinzip der Trägheit, nach dem jeder mit einer Masse behaftete Körper in seinem Bewegungszustand verharrt, so lange keine äußere Kraft auf ihn einwirkt.
Inhaltsverzeichnis
Translatorischer Anteil
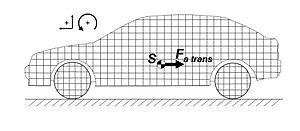 Am Fahrzeug wirkende translatorische Trägheitskraft
Am Fahrzeug wirkende translatorische Trägheitskraft
Die sich bei einer translatorischen Beschleunigung ergebende Kraft erhält man mit dem Ansatz für Trägheitskräfte nach d'Alembert.
Mit der Trägheitskraft ergibt sich die translatorische Widerstandskraft
 zu:
zu:mit:
Rotatorischer Anteil
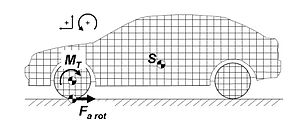 Am Antriebsrad wirkende rotatorische Trägheitskraft
Am Antriebsrad wirkende rotatorische TrägheitskraftBei der translatorischen Beschleunigung des Fahrzeugs müssen die sich drehenden Teile des Antriebsstrangs (Wellen, Räder, Zahnräder im Getriebe etc.) rotatorisch beschleunigt werden. Hierzu ist zusätzlich eine rotatorische Widerstandskraft zu überwinden, die sich aus dem Massenträgheitsmoment sowie der Winkelbeschleunigung des jeweiligen Bauteils ergibt.[1] Zur Bestimmung der sich hieraus ergebenden Gesamtkraft werden die Massenträgheitsmomente der sich drehenden Teile auf die Antriebsachse reduziert.
Analog zur translatorischen Berechnung gilt:
Daraus ergibt sich die rotatorische Widerstandskraft zu:
mit:
Aus der Beziehung
ergibt sich durch zweimalige Differenzierung nach der Zeit:
Damit folgt unter Verwendung von
 :
:Für das reduzierte Massenträgheitsmoment sind folgende Trägheitsmomente zu berücksichtigen:
-
Zu berücksichtigende Trägheitsmomente Bauteil, Fahrzeugkomponente Trägheitsmoment (Bezeichnung! Motor 
Kupplung 
Getriebe mit jeweiliger Übersetzung i (bezogen auf die Getriebeeingangswelle) 
Antriebswelle, Differential 
Räder (meistens einschließlich Bremsscheiben sowie Achswellen) 
Bei dem Massenträgheitsmoment der Räder ist darauf zu achten, dass alle Räder des Fahrzeugs zu berücksichtigen sind, unabhängig davon, ob die Vorderräder, die Hinterräder oder alle Räder angetrieben werden.
Unter der Berücksichtigung der Übersetzungen im Getriebe
 (für den jeweiligen Gang) und der Achsübersetzung
(für den jeweiligen Gang) und der Achsübersetzung  (für Hinter- bzw. Vorderradantrieb) ergibt sich das auf die Antriebsachse reduzierte Massenträgheitsmoment für einen Gang i mit der Forderung nach dynamischer Gleichwertigkeit von Ausgangs- und Ersatzsystem:
(für Hinter- bzw. Vorderradantrieb) ergibt sich das auf die Antriebsachse reduzierte Massenträgheitsmoment für einen Gang i mit der Forderung nach dynamischer Gleichwertigkeit von Ausgangs- und Ersatzsystem:Zusammenfassung der Beschleunigungsanteile
Der Gesamtbeschleunigungswiderstand ergibt sich aus der Addition der translatorischen und der rotatorischen Widerstandskraft zu:
Zur Vereinfachung und der besseren Handhabbarkeit wegen wird nun ein Massenfaktor
 eingeführt:
eingeführt:-
 ,
,
der nur noch fahrzeugspezifische Daten enthält. Damit ergibt sich für den gesamten Beschleunigungswiderstand:
Da die Getriebeübersetzung in die Ermittlung des reduzierten Massenträgheitsmomentes quadratisch eingeht, kann der Massenfaktor in einem breiten Bereich streuen. So ist beispielsweise bei Gelände- oder Nutzfahrzeugen mit extrem hoch übersetztem Kriechgang ein höherer Kraftbedarf für die Beschleunigung der rotierenden Massen erforderlich, als für die rein translatorische Beschleunigung des Fahrzeugs
 2)" border="0">.
2)" border="0">.Einzelnachweise
- ↑ FHTW-Berlin / Prof. Dr.-Ing. Karlheinz H. Bill / Einführung in die Kraftfahrzeugtechnik, Vorlesungskript
Literatur
- Hans-Hermann Braess, Ulrich Seiffert: Vieweg Handbuch Kraftfahrzeugtechnik. 2. Auflage, Friedrich Vieweg & Sohn Verlagsgesellschaft mbH, Braunschweig/Wiesbaden 2001, ISBN 3-528-13114-4



















Wikimedia Foundation.