- Raumzeigerdarstellung
-
Unter dem Begriff Raumzeigerdarstellung versteht man in der Elektrotechnik die Darstellung von physikalischen Größen im Dreiphasensystem als Zeiger in einer komplexen Ebene. Das Hauptanwendungsgebiet der Raumzeigerdarstellung ist die Beschreibung von Magnetfeldern, Spannungen und Strömen in Drehfeldmaschinen. Die Raumzeigerdarstellung darf nicht mit der Zeigerdarstellung in der Wechselstromtechnik verwechselt werden.
Inhaltsverzeichnis
Raumzeiger
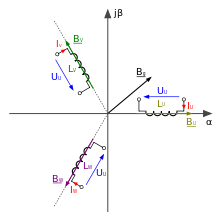 Statorspulen im statorfesten αβ-Koordinatensystem. Jede Spule erzeigt ein Magnetfeld mit vorgegebener Richtung. Durch Überlagerung dieser ergibt sich der resultierender Raumzeiger Bg
Statorspulen im statorfesten αβ-Koordinatensystem. Jede Spule erzeigt ein Magnetfeld mit vorgegebener Richtung. Durch Überlagerung dieser ergibt sich der resultierender Raumzeiger Bg
Der Grundgedanke der Raumzeigerdarstellung beruht auf der Erfüllung der Nullbedingung. Das heißt, der Sternpunkt der Last (sofern vorhanden) ist nicht mit dem Neutralleiter im Dreiphasensystem verbunden. Somit ergibt die Summe der Phasenströme immer null, die Nullbedingung ist also erfüllt. Aufgrund dieser Voraussetzung kann durch Kenntnis zweier Größen immer auf die Dritte geschlossen werden. Ein derartiges Dreiphasensystem kann also durch zwei Größen vollkommen beschrieben werden.
Bei einer Drehfeldmaschine sind drei Spulen im geometrischen Winkel von 120° angeordnet. Jede dieser Spulen erzeugt bei Stromfluss in der Maschine ein eigenes Magnetfeld. Wird die Maschine nun an ein Drehstromsystem angeschlossen, ergibt sich für jeden Momentanwert eine andere Magnetisierung der Spulen. Da sich die drei Magnetfelder überlagern, ergibt sich im Luftspalt der Maschine eine magnetische Flussdichteverteilung, welche nicht gleichförmig ist. Die Flussdichteverteilung entlang des Umfangs des Luftspalts hat ein Maximum an einer bestimmten Stelle. Die magnetische Flussdichte hat somit für jeden Momentanwert der Phasenströme eine bestimmte Orientierung in der Maschine. Diese geometrische Orientierung kann nun durch zwei Werte (Realteil und Imaginärteil) als Raumzeiger dargestellt werden.
Berechnung des Raumzeigers
Allgemein kann der Raumzeiger aus den drei Einzelgrößen durch folgende Beziehung berechnet werden, wobei vorausgesetzt wird, dass das Koordinatensystem so angeordnet ist, dass die Wicklung U dieselbe Phasenlage wie die Realachse aufweist.
Wobei a und a² die Drehoperatoren darstellen.
Da vorausgesetzt wird, dass die Nullbedingung erfüllt ist, wird durch die Raumzeigerdarstellung das dreiphasige Wicklungssystem durch ein zweiphasiges Wicklungssystem, bestehend aus zwei senkrecht zueinanderstehenden Wicklungen, ersetzt.
Die Darstellung als Raumzeiger ist nicht nur auf die magnetische Flussdichte beschränkt, sondern kann analog dazu für alle anderen elektrischen Größen wie Spannung, Strom und Fluss angewandt werden.
Koordinatensystem
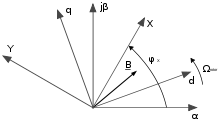 Übersicht der Koordinatensysteme. Das rotorfeste dq-Koordinatensystem rotiert um das statorfeste αβ-Koordinatensystem.
Übersicht der Koordinatensysteme. Das rotorfeste dq-Koordinatensystem rotiert um das statorfeste αβ-Koordinatensystem.Bei der vorhergehenden Betrachtung wurde davon ausgegangen, dass das Koordinatensystem ortsfest und mit dem Stator verbunden ist. Weiters wurde vorausgesetzt, dass die reelle Achse des Koordinatensystems mit der Wicklungsachse der U Wicklung zusammenfällt.
Der Raumzeiger muss jedoch nicht zwingend in dem bisher beschriebenen αβ-Koordinatensystem mit der Clarke-Transformation dargestellt werden. Für spezielle Anwendungen, wie beispielsweise die feldorientierte Regelung, ist es nötig, das Koordinatensystem mit dem Rotor der Drehfeldmaschine rotieren zu lassen. Das Rotorfeste dq-Koordinatensystem rotiert somit mit der mechanischen Winkelgeschwindigkeit Ωrotor um das Statorfeste αβ-Koordinatensystem. Der Raumzeiger im dq-Koordinatensystem kann durch die dq0-Transformation aus den Phasengrößen berechnet werden.
Unabhängig davon kann genauso ein beliebiges Koordinatensystem, welches sich beispielsweise am Statorfluss, dem Luftspaltfluss oder dem Rotorfluss orientiert, gewählt werden.
Anwendung
Die Raumzeigerdarstellung findet vorwiegend in der elektrischen Antriebstechnik bei der Regelung von Drehfeldmaschinen Anwendung. Frequenzumrichter arbeiten zum Teil intern mit Raumzeigern, welche zur Steuerung der elektrischen Maschine mithilfe der Raumzeigermodulation ausgegeben werden.
Literatur
- Dierk Schröder: Elektrische Antriebe - Grundlagen 1. Auflage, Springer Berlin Heidelberg, Berlin, Heidelberg, 2009, ISBN 978-3-642-02989-9
- Joachim Specovius: Grundkurs Leistungselektronik 2. Auflage, Vieweg, 2008, ISBN 978-3-8348-0229-3
Weblinks
Siehe auch





Wikimedia Foundation.