- Kurs (Navigation)
-
Unter Kurs versteht man den stets dreiziffrig in Grad angegebenen Winkel zwischen einer Bezugsrichtung und der Bewegungs- oder Vorausrichtung eines Schiffs oder Flugzeugs. Bei ortsfesten Beobachtern spricht man von einer Peilung.
Kurse in Bezug zum geografischen Nordpol werden als rechtweisend, in Bezug zum magnetischen Nordpol als missweisend bezeichnet. Die Winkel werden dabei im Uhrzeigersinn gezählt. Kurs 090 bedeutet also Kurs Ost.
Aus der gemessenen oder geschätzten Geschwindigkeit und der Zeit bis zur Kursänderung werden die in Kursrichtung zurückgelegten Wegstrecken während der Fahrt laufend errechnet und in die Karte eingetragen. Das Verfahren heißt Koppelnavigation. Sie wird durch Standortbestimmungen überprüft und bei Bedarf korrigiert. Standortbestimmungen können durch Peilung von Landmarken bekannter Positionen, durch andere Methoden der terrestrischen Navigation und Astronavigation sowie mit technischen Hilfsmitteln der Ortsbestimmung wie zum Beispiel GPS vorgenommen werden.
Inhaltsverzeichnis
Bezeichnungen
Winkel relativ zur Nordrichtung nach DIN 13312
 Kurse
Kurse
Es wird zwischen folgenden Kursen, den damit in Zusammenhang stehenden Abkürzungen sowie deren englischen Entsprechungen unterschieden:
- rwN = rechtweisend Nord = True North (TN) = Nordrichtung.
- rwK = rechtweisender Kurs = True Course (TC) = Winkel zwischen dem geplanten oder tatsächlichen Weg eines Schiffes und rechtweisend Nord (z. B. Kartenkurs (KaK) in Bezug zur Lage der Meridiane in der Seekarte).
- mwK = missweisender Kurs = Magnetic Course (MC) = Winkel zwischen dem Weg eines Schiffes oder Flugzeugs und missweisend Nord (vom Erdmagnetfeld bestimmte Nordrichtung).
- OM = Ortsmissweisung = Ortsabhängige Differenz zwischen rechtweisend und missweisend Nord (Isogonen der Karte); OM ist in obiger Zeichnung als „Dek“ (Deklination) bezeichnet. Die Ortsmissweisung ist kein Kurs sondern ein Korrekturwert.
- MgK = Magnetkompasskurs = Compass Course (CC) = Winkel zwischen dem Weg eines Schiffes und Kompass-Nord (vom Erdmagnetfeld und von der Deviation bestimmtes Nord).
Der Steuerkurs (englisch: heading) zeigt die Rechtvoraus-Richtung entlang der Längsachse eines Flugzeugs bzw der Kiellinie eines Schiffes an. Wegen der Störeinflüsse von Wind und Meeresströmung unterscheidet sich der Steuerkurs fast immer von der Bewegungsrichtung und den oben genannten Kursen:
- rwSK = rechtweisender Steuerkurs = True Heading (TH) = Winkel zwischen der Kiellinie eines Schiffes und rechtweisend Nord.
- mwSK = missweisender Steuerkurs = Magnetic Heading (MH) = Winkel zwischen der Kiellinie eines Schiffes und missweisend Nord.
- KSK = Kompass-Steuerkurs = Compass Heading (CH) = Winkel zwischen der Kiellinie eines Schiffes und Kompass-Nord.
Folgende beiden Kurse werden durch rechnerische Korrektur aus Steuerkursen ermittelt:
- KdW = Kurs durchs Wasser durch die Berücksichtigung der Abdrift.
- KüG = Kurs über Grund zusätzlich wegen der Strömung durch Berücksichtigung der Stromversetzung.
Analoges gilt für die Flugnavigation in der Luftfahrt in Bezug auf den Luvwinkel (L).
Kurskorrekturen
 Richtungsbezeichnungen
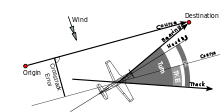
RichtungsbezeichnungenDer direkte Weg von einem Ausgangspunkt (origin) zum Ziel (destination) führt über den Kurs. Das ist die Verbindungslinie beider Punkte, siehe Zeichnung. Bei einer Störung, beispielsweise eine Strömung oder Querwind, wird das Ziel verfehlt. Der zurückgelegte Weg, der Weg über Grund oder Track, weicht vom Kurs ab. Der Schiffs- oder Flugzeugführer steuert gegen. Da der Antrieb mit der Fahrzeugachse (Heading) verbunden ist, dreht er das gesamte Fahrzeug in Richtung der Störung. Wenn es gelingt, den Kursfehler (TKE, Abweichung zwischen geplantem Kurs und Track) auszugleichen, folgt das Fahrzeug seinem ursprünglichen Kurs, aber parallel versetzt um die sogenannte Querablage zum Sollkurs. Da nun TKE Null ist, bestimmt der Driftwinkel die Verkippung des Fahrzeugs aus der Fortbewegungsrichtung.
Von der augenblicklichen Position aus liegt das Ziel in Peilrichtung (bearing). Um dort anzukommen, muss der Winkel zwischen Peilung und Track, also die Kursabweichung (turn), auf Null reduziert werden.
In der Vergangenheit war es außerordentlich schwierig, den Weg über Grund und damit den eigenen Standort zu bestimmen. Heute zeichnen GPS-Empfänger in Echtzeit Tracks an jedem Ort der Erde auf.
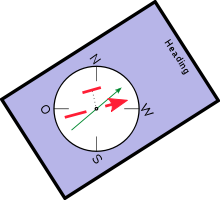 GPS-Richtungsanzeiger für Kurs (rot) und Peilung (grün). Norden ist oben. Ausrichtung entlang der Orientieurung des Flugzeugs aus oberer Grafik.
GPS-Richtungsanzeiger für Kurs (rot) und Peilung (grün). Norden ist oben. Ausrichtung entlang der Orientieurung des Flugzeugs aus oberer Grafik.Bezeichnungen, siehe Zeichnung oben:
- Kurs (Course, Desired Track, DTK)
- Der geplante Weg vom Ausgangspunkt (Origin) zum Ziel (Destination);
- Weg über Grund (Track, TRK, Course over Ground, COG)
- Tatsächlich zurückgelegter Weg, Bodenspur;
- Peilung (Bearing)
- Verbindungslinie von der aktuellen Position zum Ziel;
- Orientierung (Heading)
- Orientierung des Fahrzeugs;
- Querabweichung zum Sollkurs (Off Course, Crosstrack distance, Crosstrack error, XTK)
- Abstand zwischen geplantem und aktuellem Kurs;
- Kursabweichung(TKE, Turn)
- Winkel zwischen Peilung und Track, also die Abweichung vom Ziel relativ zum zurückgelegten Weg; da es heutzutage möglich ist, den Track kontinuierlich zu erfassen, kann der Turn auf Null gesteuert und fortlaufend ein Peilkurs eingehalten werden;
- Kursfehlerwinkel (Track (error) angle, TKE)
- Winkel zwischen geplantem Kurs (Course) und dem Weg über Grund (Track);
- Driftwinkel (Drift Angle, DA)
- Winkel zwischen Weg über Grund und Orientierung. Wenn TKE=0, heißt der Winkel auch Luvwinkel (WCA).
Die Grafik zeigt die Richtungsanzeiger eines GPS-Empfängers im Flugzeug aus der oberen Grafik. Der Querabstand des unterbrochenen Kurs-Pfeils (rot) korreliert mit der Querabweichung. Der grüne Pfeil zeigt die Peilung, der äußere Rahmen die Orientierung des Flugzeugs. Norden ist oben.
Abgeleitete Größen
Kurs und Geschwindigkeit bestimmen weitere Größen:
- Geschwindigkeit über Grund (engl. speed over ground SOG): Geschwindigkeit bezogen auf die Erdoberfläche.
- Gutgemachte Geschwindigkeit, auch Vektorgeschwindigkeit (engl. Velocity Made Good VMG): effektive Geschwindigkeit zum Ziel
- Zeit bis zum Ziel (engl. estimated Time elapsed ETE): geschätzte Zeit bis zum Erreichen des Ziels
- Geschätzte Ankunftszeit (engl. Estimated time of arrival ETA)
Geschwindigkeitsbegriffe und -messgeräte
In der Luftfahrt wird die Geschwindigkeit durch die umgebende Luft als Fahrt bezeichnet, in der Seefahrt die analoge Geschwindigkeit als Fahrt durch das Wasser (FdW), die Geschwindigkeit auf der Erdoberfläche jedoch als Fahrt über Grund (FüG). Die Messung der Fluggeschwindigkeit erfolgt mit dem Fahrtmesser. Einer groben Bestimmung der Fahrt durch das Wasser dient das Log bzw. die Logge eines Schiffes.
weitere Kursbegriffe
Vor allem für windgetriebene Boote gibt es – praktisch ohne Bedeutung für die Navigation – verschiedene Begriffssysteme unter der Bezeichnung Kurs zum Wind. Hierbei ist als Bezugsrichtung für (schnelle) Eissegler die auf der Erdoberfläche wahrzunehmende Windrichtung festgelegt. Bei (langsamen) Segelfahrzeugen herrscht hingegen derzeit (2007) die Tradition vor, die Richtung des auf dem Fahrzeug verspürten Windes (scheinbarer Wind), der sich aus meteorologischem Wind und Fahrtwind durch Vektoraddition zusammensetzt, als Bezugsrichtung anzunehmen.



Wikimedia Foundation.