- De Casteljau-Algorithmus
-
Der Algorithmus von de Casteljau ermöglicht die effiziente Berechnung einer beliebig genauen Näherungsdarstellung von Bézierkurven durch einen Polygonzug. Der Algorithmus wurde Anfang der 1960er Jahre von Paul de Faget de Casteljau bei Citroën entwickelt.
Inhaltsverzeichnis
Idee
Der Algorithmus von de Casteljau beruht darauf, dass eine Bézierkurve geteilt und durch zwei aneinandergesetzte Bézierkurven dargestellt werden kann. Diese Unterteilung kann rekursiv fortgesetzt werden. Das Kontrollpolygon der zusammengesetzten Bézierkurve nähert sich dabei der Originalkurve an. Nach ausreichend vielen Verfeinerungsschritten kann der entstandene Polygonzug als Näherung für die Originalkurve verwendet werden. Ein Verfeinerungsschritt, der das Kontrollpolygon einer Ausgangskurve in ein Kontrollpolygon einer zusammengesetzten Kurve zerlegt, besteht nur aus wenigen einfachen Teilungen von Polygonkanten.
Darüber hinaus ermöglicht der Algorithmus die schnelle Bestimmung jedes einzelnen Punktes auf der Bézierkurve durch seine parametrische Darstellung.
Erweiterungen findet der Algorithmus im Blossoming wie auch im fokalen Algorithmus von de Casteljau.
Algorithmus
Gegeben sind die Kontrollpunkte
 der Ausgangskurve
der Ausgangskurve 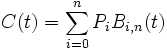 (
(![t \in [0, 1]](/pictures/dewiki/100/d9a06fde4663cdd5b1ba693e9127232f.png) ).
).Von den Kontrollpunkten der Ausgangskurve C(t) liegen im Allgemeinen nur P0 und Pn auf der Kurve. Der Algorithmus berechnet im ersten Schritt einen weiteren Punkt C(t0) der Kurve. Dabei kann
 frei gewählt werden. Die Kurve wird im Weiteren an diesem Punkt C(t0) geteilt. Es bietet sich daher die Wahl von
frei gewählt werden. Die Kurve wird im Weiteren an diesem Punkt C(t0) geteilt. Es bietet sich daher die Wahl von  an, weil dies eine gleichmäßige Aufteilung und damit eine schnelle Annäherung des Kontrollpolygons an die Ausgangskurve gewährleistet.
an, weil dies eine gleichmäßige Aufteilung und damit eine schnelle Annäherung des Kontrollpolygons an die Ausgangskurve gewährleistet.Bilden von Teilverhältnissen
 Konstruktion der ersten Folge von Hilfspunkten Pi(1) aus den Ausgangspunkten Pi(0).
Konstruktion der ersten Folge von Hilfspunkten Pi(1) aus den Ausgangspunkten Pi(0).Statt durch direktes Einsetzen von t0 in die Gleichung der Kurve C(t) geschieht die Berechnung von C(t0) über die Konstruktion von Punkten
 aus den gegebenen Kontrollpunkten
aus den gegebenen Kontrollpunkten  . Die Konstruktion startet mit den Ausgangspunkten
. Die Konstruktion startet mit den Ausgangspunkten  . Aus diesen werden durch Teilen der Verbindungslinien
. Aus diesen werden durch Teilen der Verbindungslinien  im Verhältnis
im Verhältnis  neue Punkte
neue Punkte  konstruiert. Der Punkt berechnet sich nach der intuitiv einsichtigen Formel:
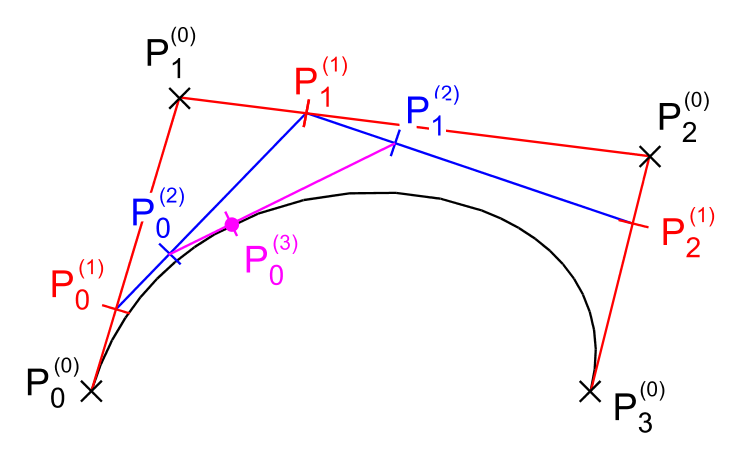
konstruiert. Der Punkt berechnet sich nach der intuitiv einsichtigen Formel:In nebenstehender Abbildung sind die Punkte
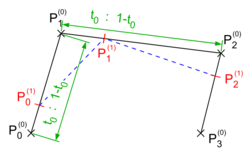
 , die aus den Ausgangspunkten hervorgegangen sind, rot eingezeichnet. Durch Fortsetzen der Berechnungsvorschrift werden in gleicher Weise Punkte
, die aus den Ausgangspunkten hervorgegangen sind, rot eingezeichnet. Durch Fortsetzen der Berechnungsvorschrift werden in gleicher Weise Punkte  bestimmt. Zur Berechnung von
bestimmt. Zur Berechnung von  werden dazu die blau gestrichelten Verbindungslinien der im ersten Schritt berechneten Punkte
werden dazu die blau gestrichelten Verbindungslinien der im ersten Schritt berechneten Punkte  im selben Verhältnis geteilt, usw.
im selben Verhältnis geteilt, usw.Konstruktion eines Kurvenpunktes
Es gilt die folgende Aussage (siehe Beweis der Punktkonstruktion):
 Komplette Konstruktion von P0(3) für n=3
Komplette Konstruktion von P0(3) für n=3Das heißt, dass der Punkt
 , welcher in der nten Iteration durch fortgesetztes Streckenteilen konstruiert wird, ein Punkt der Kurve ist. Das Teilungsverhältnis t0 bestimmt dabei seine Lage auf der Kurve.
, welcher in der nten Iteration durch fortgesetztes Streckenteilen konstruiert wird, ein Punkt der Kurve ist. Das Teilungsverhältnis t0 bestimmt dabei seine Lage auf der Kurve.In nebenstehender Abbildung ist die Konstruktion für n = 3 vollständig durchgeführt. Der Punkt
 , der durch dreifache Anwendung der Teilungsvorschrift aus den Ausgangspunkten
, der durch dreifache Anwendung der Teilungsvorschrift aus den Ausgangspunkten 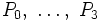 hervorgegangen ist, liegt auf der gesuchten Kurve.
hervorgegangen ist, liegt auf der gesuchten Kurve.Die bei weitem interessantere Aussage ist aber, dass dieser Punkt
die Kurve C(t) in zwei Bézierkurven C1(t) und C2(t) teilt und dass die Punkte  das Kontrollpolygon von C1(t) und die Punkte
das Kontrollpolygon von C1(t) und die Punkte  das Kontrollpolygon von C2(t) bilden.
das Kontrollpolygon von C2(t) bilden.Teilen in zwei Bézierkurven
 Zerlegung von C(t) in C1(t) und C2(t)
Zerlegung von C(t) in C1(t) und C2(t)Nebenstehende Abbildung zeigt die Zerlegung von C(t) in C1(t) und C2(t) für n = 3. Dabei bilden die Punkte
 ,
,  ,
,  und das Kontrollpolygon von C1(t) und entsprechend die Punkte ,
und das Kontrollpolygon von C1(t) und entsprechend die Punkte ,  ,
,  und
und  das Kontrollpolygon von C2(t).
das Kontrollpolygon von C2(t).An der Abbildung erkennt man außerdem, warum in der Regel ein Teilungsverhältnis von
verwendet wird. Da in diesem Beispiel ein Teilungsverhältnis kleiner  verwendet wurde, teilt sich die Kurve C(t) in einem ungleichen Verhältnis in eine kurze Kurve C1(t) und eine lange Kurve C2(t) auf. Der kürzere Teil ist viel besser an sein Kontrollpolygon angenähert als der längere. Möchte man (bei ungefähr gleich langen Strecken des Ausgangskontrollpolygons) eine gleichmäßige Näherung erreichen, eignet sich dazu das Teilungsverhältnis .
verwendet wurde, teilt sich die Kurve C(t) in einem ungleichen Verhältnis in eine kurze Kurve C1(t) und eine lange Kurve C2(t) auf. Der kürzere Teil ist viel besser an sein Kontrollpolygon angenähert als der längere. Möchte man (bei ungefähr gleich langen Strecken des Ausgangskontrollpolygons) eine gleichmäßige Näherung erreichen, eignet sich dazu das Teilungsverhältnis .Die Unterteilung der Kurven wird so lange fortgesetzt, bis sie hinreichend genau durch ihre Kontrollpolygone angenähert sind.
Pseudocode
Zu Beginn liegen die Punkte des Kontrollpolygons in einem Feld
 vor. Bei gegebenem Parameter t0 wird der Punkt C(t0) folgendermaßen berechnet:
vor. Bei gegebenem Parameter t0 wird der Punkt C(t0) folgendermaßen berechnet:BEGIN FOR i:=0..n FOR j:=1..n
FOR i:=0..(n-j)
// Unterteilung mit Faktor t
FOR j:=1..n
FOR i:=0..(n-j)
// Unterteilung mit Faktor t
 RETURN
END
RETURN
END
Der obige Algorithmus ist insoweit unvollständig, dass nur der Punkt C(t0) bestimmt, aber keine fortgesetzte Unterteilung von C(t) durchgeführt wird. Der Algorithmus ist nicht speichereffizient, da für alle
 neue Speicherplätze belegt werden.
neue Speicherplätze belegt werden.Beweis der Punktkonstruktion
Die Aussage, dass über n-fach fortgesetzte Streckenteilung ein weiterer Punkt der Kurve konstruiert werden kann, lässt sich über Lösen der Rekurrenz beweisen, die
definiert.Rekurrenz-Gleichung
Die Rekurrenz-Gleichung definiert die Punkte
in Abhängigkeit von den in der letzten Iteration berechneten Punkten  . Den Start der Rekurrenz bilden die Punkte Pi:
. Den Start der Rekurrenz bilden die Punkte Pi:Zu beweisende Aussage
Zu beweisen ist die Aussage, dass der Punkt
ein Punkt der Kurve an der Stelle t0 ist:Verallgemeinerung der Aussage
Um eine Lösung der Rekurrenz für den speziellen Punkt
zu finden, wird eine geschlossene Form für alle Punkte der Rekurrenz gesucht und gezeigt, dass diese insbesondere für das gesuchte Resultat liefert. Der Beweis für wird über vollständige Induktion mit folgender Induktionsannahme geführt: .
.
Der Induktionsschritt ist dann eine gradlinige Rechnung, bei der Aussagen über Binomialkoeffizienten benutzt werden.
Anwendung
Mit Hilfe des Algorithmus von de Casteljau ist es möglich, Näherungen von Bézierkurven durch gerade Linien zu errechnen. Dadurch kann eine Bézierkurve effizient mit dem Rechner gezeichnet werden.
Weblinks




Wikimedia Foundation.