- Fehlerellipse
-
Bei der Ausgleichung geodätischer Lagenetze erhält man im Zuge der Fehlerrechnung die mittleren Fehler der Punktkoordinaten in Richtung der jeweiligen Koordinatenachsen. Zur Analyse der Fehlersituation ist jedoch die Kenntnis der Maximalfehler und deren Ausrichtung erforderlich.
Mit Hilfe der Kofaktoren aus der Ausgleichung lassen sich der Maximal- und der Minimalfehler berechnen. Da deren Achsen senkrecht aufeinander stehen, ist die Konstruktion einer Ellipse möglich, die in einer Übersichtskartierung die Fehlersituation übersichtlich darstellen kann.
Zum Abgleich der Bezeichnungen sind nachstehend die Grundgleichungen einer Ausgleichung nach der Methode der kleinsten Quadrate im Sinne einer Netzausgleichung angegeben:
v ... Vektor der Verbesserungen der Beobachtungen A ... Designmatrix P ... Gewichtsmatrix der Beobachtungen x ... Vektor der gesuchten Koordinatenzuschläge l ... Vektor der Beobachtungen
Verbesserungsgleichungen:
Berechnung der Unbekannten:
Berechnung der Kofaktorenmatrix:
Kofaktorenmatrix mit ihren punktbezogenen Kofaktoren:
Mittlerer Gewichtseinheitsfehler der Ausgleichung (Anmerkung: traditionell werden Standardabweichungen im Vermessungswesen als mittlere Fehler bezeichnet):
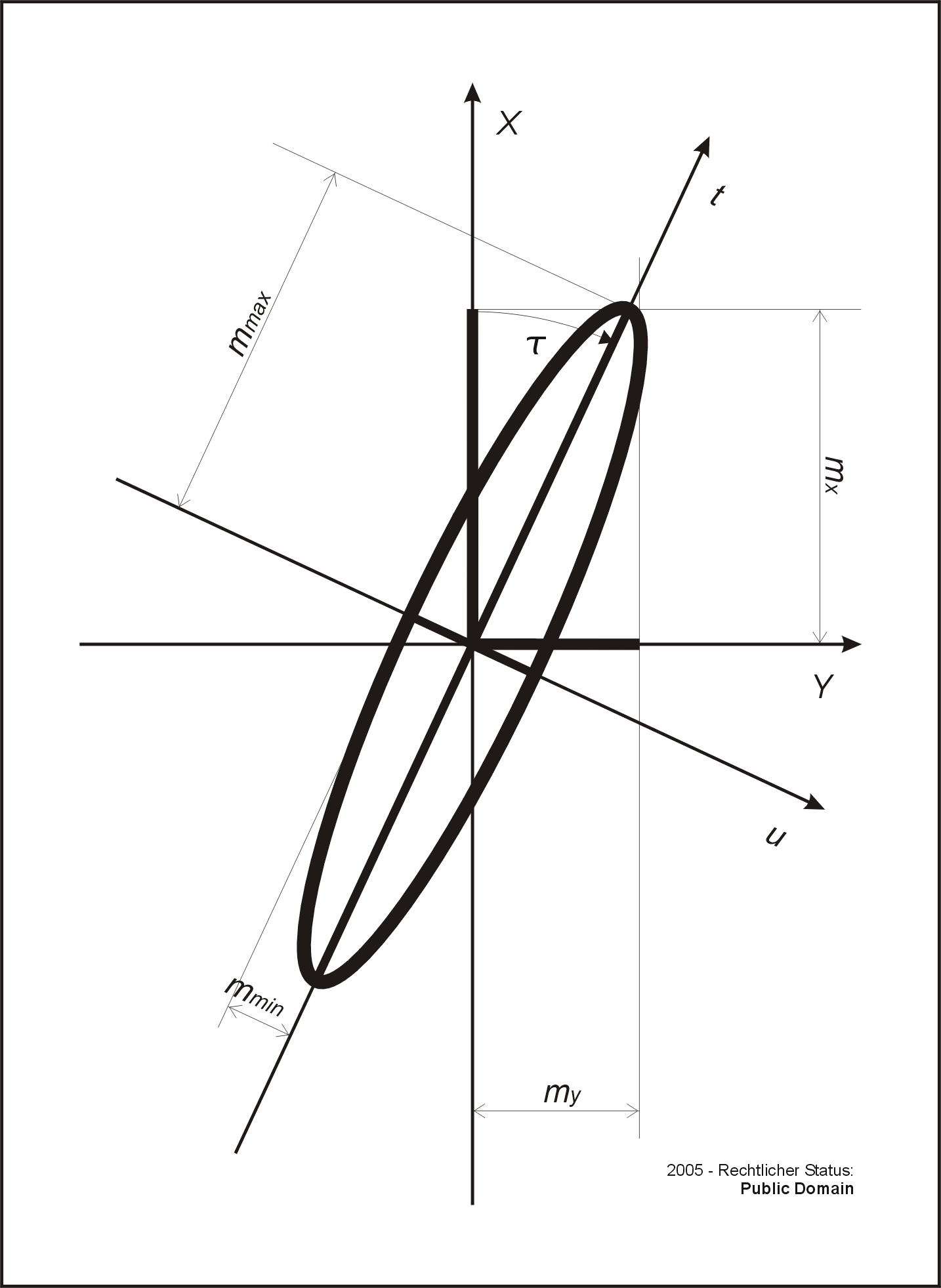
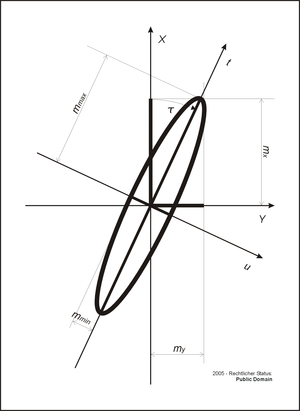 Darstellung der aus einer Ausgleichung abgeleiteten Fehlerellipse mit den Maximalfehlern.
Darstellung der aus einer Ausgleichung abgeleiteten Fehlerellipse mit den Maximalfehlern.
Mittlerer Koordinatenfehler in X-Richtung:
Mittlerer Koordinatenfehler in Y-Richtung:
Richtungswinkel des Maximalfehlers:
Hilfsgrössen:
Berechnung des Kofaktors des Maximalfehlers:
- qmax = q1 + q2
Berechnung des Kofaktors des Minimalfehlers:
- qmin = q1 − q2
Beziehung zwischen den Kofaktoren in Richtung der Koordinatenachsen und denen der Maximalfehler:
- qmax + qmin = qxx + qyy
Mittlerer Maximalfehler:
Mittlerer Minimalfehler:
Obwohl die Fehlerellipse ein vielverwendetes Darstellungsmittel ist, sei darauf hingewiesen, dass die Form der Fehlerellipse keine korrekte Aussage zulässt bei Fehlern, die weder in den Koordinatenachsen, noch in den Achsen der Maximalfehler liegen. Aus diesem Grunde sollte statt der Fehlerellipse besser deren Fußpunktkurve Verwendung finden, die richtungsunabhängig korrekte Fehleraussagen zulässt, aber deutlich schwieriger zu berechnen ist
Literatur
- Groten, Erwin: Zur Definition des mittleren Punktfehlers; in: Zeitschrift für Vermessungswesen (ZfV); 11/1969; S. 455-457.
- Gotthardt, E.: Einführung in die Ausgleichungsrechnung; Verlag Herbert Wichmann, Karlsruhe 1968.
- Gründig, L.: Grundlagen der Ausgleichungsrechnung; PDF; Schriftsatz von 2003; Download 2005.












Wikimedia Foundation.